




CubeMars AKA60-6 KV80 Siłownik robotyczny do AGV i robota kołowego, moment obrotowy 3Nm, wysokie obciążenie promieniowe 18kg
CubeMars AKA60-6 KV80 Siłownik robotyczny do AGV i robota kołowego, moment obrotowy 3Nm, wysokie obciążenie promieniowe 18kg
CubeMars
Nie można załadować gotowości do odbioru
Przegląd
Siłownik CubeMars AKA60-6 KV80 to wysokowydajne rozwiązanie quasi-bezpośredniego napędu, dostosowane do AGV i robotów kołowych, które wymagają dużej nośności promieniowej i kompaktowej integracji. Z nominalnym momentem obrotowym wynoszącym 3Nm, szczytowym momentem obrotowym 9Nm oraz nośnością promieniową do 18kg, ten siłownik oferuje 52% poprawę w porównaniu do modelu AK60-6 w tych samych warunkach momentu obrotowego. Działając przy 24V lub 48V, zapewnia stabilną wydajność w trudnych warunkach, w zakresie od -20℃ do 50℃.
Kluczowe cechy
-
Wysoka nośność promieniowa: Wzmocniona struktura wspiera do 18kg nośności promieniowej, idealna do zastosowań kołowych.
-
Zintegrowany wtyk zasilania i sygnału: Trwały 2+5PIN wtyk łączy linie zasilania i sygnałów CAN/UART, zabezpieczony śrubami M2 dla stabilnego połączenia.
-
Ulepszony projekt silnika: Optymalizowany dla płynniejszej pracy, zwiększonej trwałości i dłuższej żywotności.
-
Łatwe dostosowywanie parametrów: Obsługuje ustawienia prędkości baud UART oraz rozpoznawanie parametrów silnika jednym kliknięciem, umożliwiając szybkie debugowanie bez wgrywania oprogramowania.
Specyfikacje
Parametry mechaniczne
| Parametr | Wartość |
|---|---|
| Stosunek redukcji | 6:1 |
| Pary biegunowe | 14 |
| Bezładność wirnika | 331.91 g·cm² |
| Waga | 460g |
| Temperatura pracy Range | -20℃ ~ 50℃ |
| Udźwig promieniowy | 18kg |
| Klasa izolacji | H |
| Opór izolacji | ≥10 MΩ |
| Odporność na wysokie napięcie | 500V |
| Typ uzwojenia | Gwiazda |
Parametry elektryczne
| Parametr | Wartość |
|---|---|
| Napięcie znamionowe | 24V / 48V |
| Moment obrotowy znamionowy | 3Nm |
| Moment obrotowy szczytowy | 9Nm |
| Prędkość znamionowa | 200rpm / 400rpm |
| Prędkość bez obciążenia | 320rpm / 640rpm |
| Prąd znamionowy | 4A |
| Prąd szczytowy | 11.2A |
| Opór fazowy | 595mΩ |
| Indukcyjność fazowa | 675μH |
| Czas elektryczny | 1.13ms |
| Czas mechaniczny | 2.5ms |
| Kt (Stała momentu) | 0.11937 Nm/A |
| Kv (Stała prędkości) | 80 rpm/V |
| Ke (Stała EMF zwrotnego) | 0.0125 V/krpm |
| Km (Stała silnika) | 0.1541 Nm/√W |
Zastosowania
-
Zautomatyzowane pojazdy prowadzone (AGV)
-
Mobilne roboty kołowe
-
Systemy robotyki wymagające wysokiej gęstości momentu obrotowego oraz trwałego wsparcia promieniowego
Pobrania ręczne
![]() Podręcznik produktu modułu serii AKA Wersja 3.0.0.pdf
Podręcznik produktu modułu serii AKA Wersja 3.0.0.pdf
Szczegóły
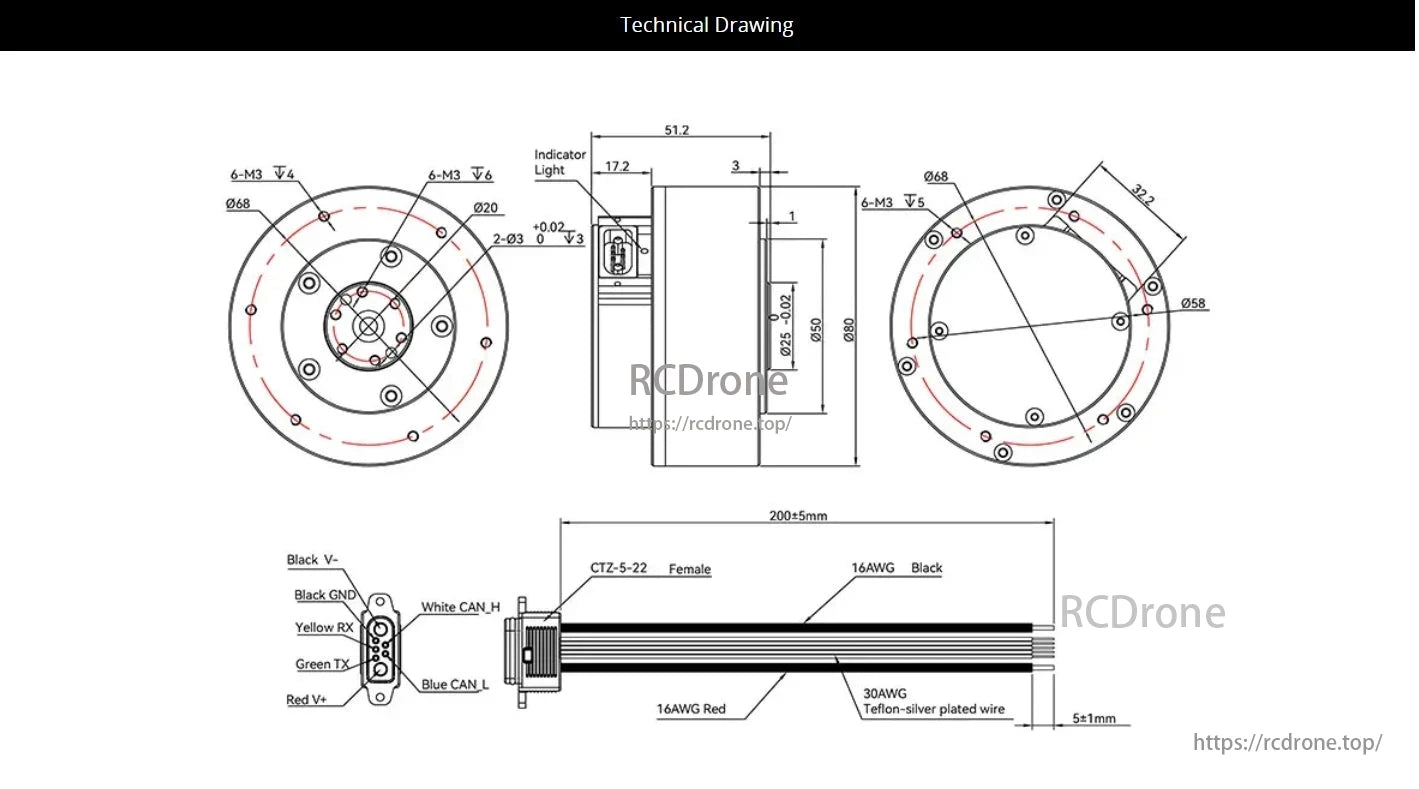
Siłownik robotyczny CubeMars AKA60-6 ma kompaktowy design 51,2 x 80 mm z sześcioma otworami montażowymi M3, lampką wskaźnikową oraz portami: Czarny V-, GND, Żółty RX, Zielony TX, Czerwony V+, Biały CAN_H, Niebieski CAN_L.Zawiera kabel o długości 200 ± 5 mm z przewodami 16AWG czerwonym/czarnym oraz 30AWG pokrytymi teflonem i srebrem. Precyzyjne specyfikacje zapewniają bezproblemową integrację z systemami robotycznymi, oferując niezawodną wydajność i łatwy montaż.

CubeMars Aktuator Robotyczny AKA60-6: zastosowanie w AGV/robotach kołowych, praca w temperaturze od -20°C do 50°C, 14 par biegunów, współczynnik redukcji 6:1, napięcie 24/48V, moment obrotowy 3Nm, prąd 4ADC, prędkość bez obciążenia 320/640rpm, waga 460g.
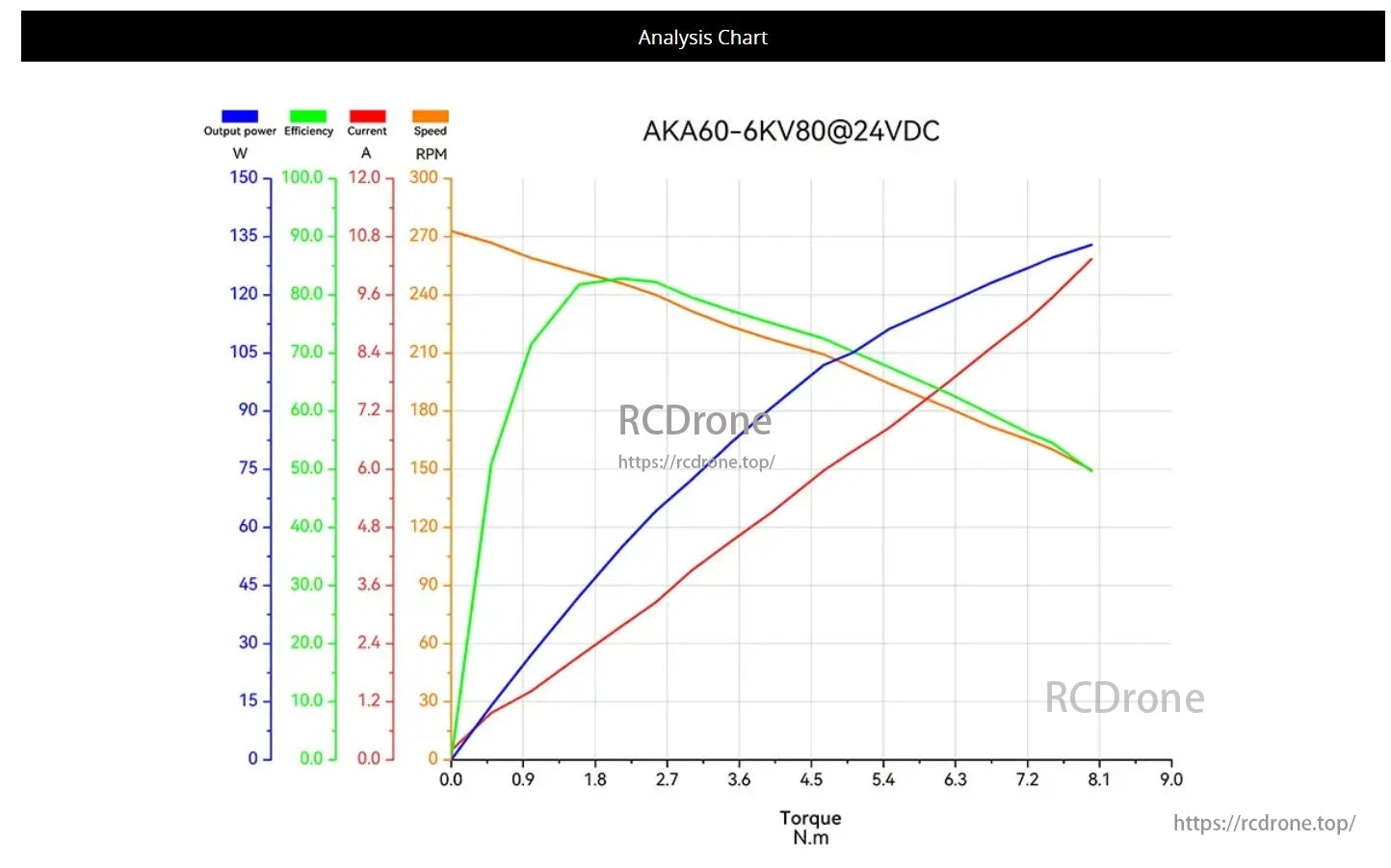
Wykres analizy dla AKA60-6KV80@24VDC actuatora. Wyświetla moc wyjściową, sprawność, prąd i prędkość w zależności od momentu obrotowego. Wykres podkreśla metryki wydajności w różnych warunkach.
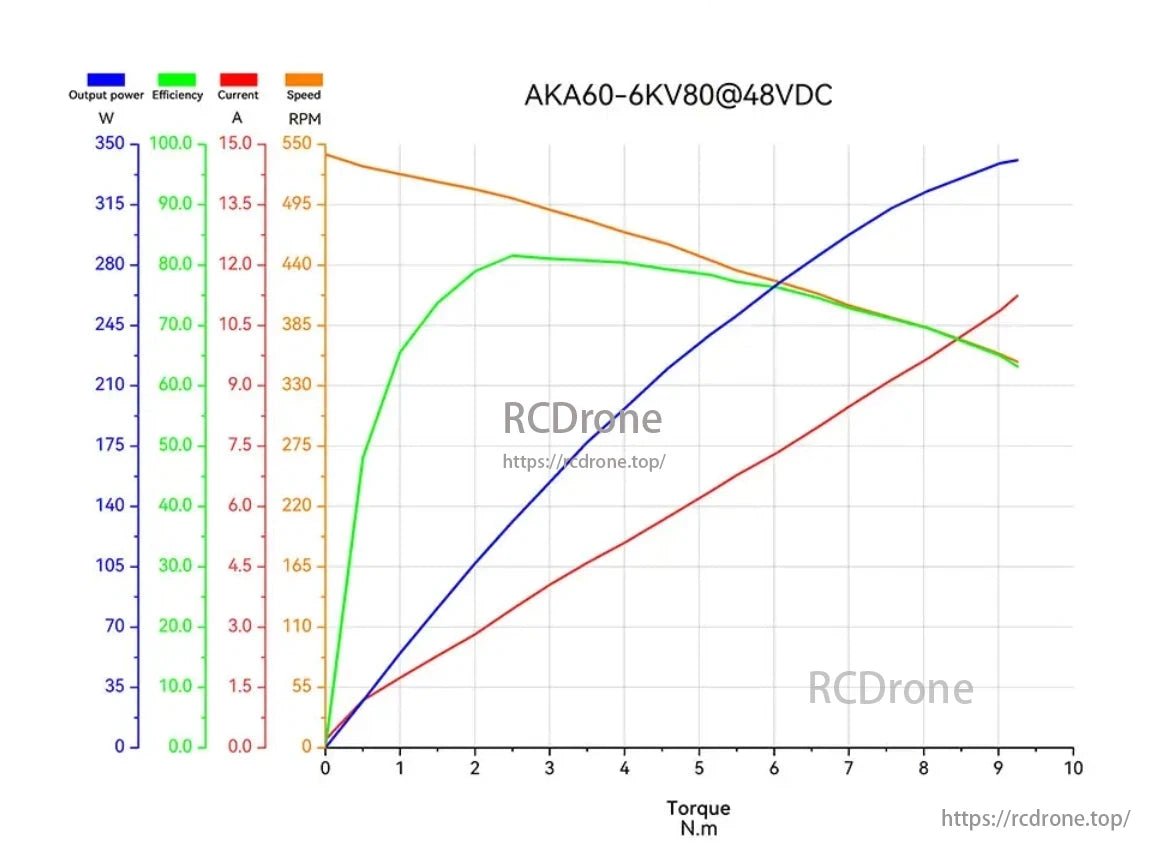
Wykres wydajności AKA60-6KV80@48VDC aktuatora robotycznego CubeMars. Moc wyjściowa (W), sprawność (%), prąd (A) i prędkość (RPM) są przedstawione w zależności od momentu obrotowego (N·m). Sprawność osiąga szczyt przy około 2 N·m, podczas gdy moc wyjściowa wzrasta w miarę zwiększania momentu obrotowego.Prąd rośnie liniowo, a prędkość maleje w miarę wzrostu momentu obrotowego. Przy 9 N·m moc osiąga około 350 W, sprawność wynosi około 60%, prąd to 15 A, a prędkość wynosi około 220 RPM. Te dane ilustrują charakterystyki operacyjne aktuatora przy różnych obciążeniach.

CubeMars AKA60-6 Aktuator Robotyczny: solidny, trwały, nowa wtyczka, wysoka nośność promieniowa.

Nowa konstrukcja zwiększa nośność promieniową do 18 kg, co stanowi 52% poprawę w porównaniu do AK60-6. Struktura silnika została przeprojektowana w celu lepszej wydajności.
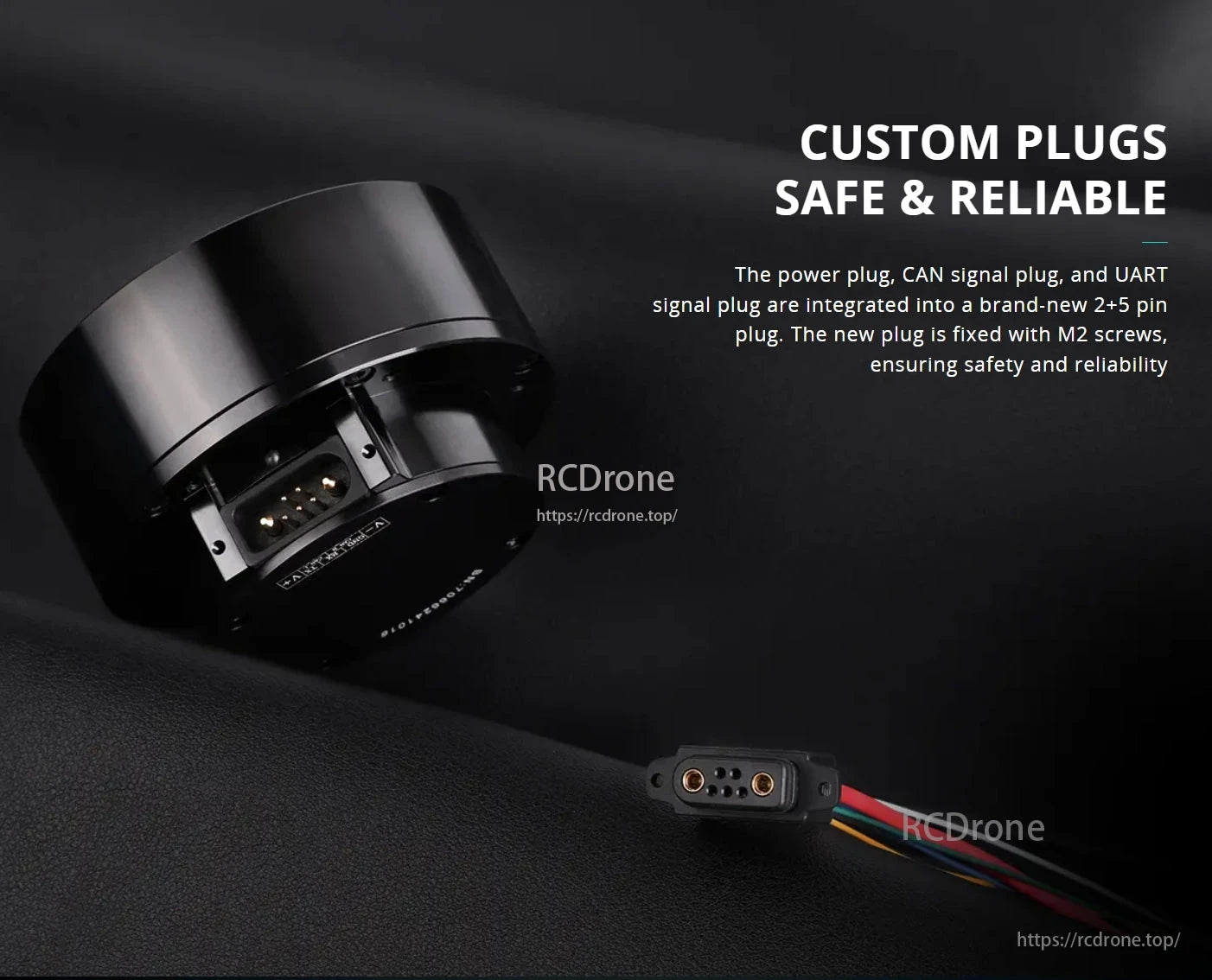
Wtyczki niestandardowe integrują sygnały zasilania, CAN i UART w konstrukcji 2+5 pin, mocowane śrubami M2 dla bezpieczeństwa i niezawodności.

Aktualizacja sterownika ułatwia debugowanie. Parametry otwartej pętli, ustawienia UART, rozpoznawanie silnika jednym kliknięciem, aktualizacja bez importu oprogramowania układowego.
Related Collections




