





Silnik CubeMars R80 KV110 48V 3-fazowy FOC z czujnikami Halla, napęd do egzoszkieletów & robotyki
Silnik CubeMars R80 KV110 48V 3-fazowy FOC z czujnikami Halla, napęd do egzoszkieletów & robotyki
CubeMars
Nie można załadować gotowości do odbioru
Przegląd
Silnik CubeMars R80 KV110 to silnik trójfazowy przeznaczony do zastosowań w napędach egzoszkieletów i robotyki, z wbudowanymi czujnikami Halla i wsparciem dla FOC (sterowanie zorientowane w polu). Posiada specjalny projekt odprowadzania ciepła oraz interfejs w stylu złącza, aby uprościć instalację.
Kluczowe cechy
- Zintegrowane czujniki Halla
- Odchylenie dokładności kąta elektrycznego: ±10°
- Specjalny projekt odprowadzania ciepła (ultra-cienka podstawa & wysoka przewodność cieplna podkładka silikonowa; skrócona całkowita długość w celu poprawy odprowadzania ciepła)
- Projekt otworu wzorcowego na dzwonie do instalacji przekładni (przekładnia harmoniczna, flansza lub inne typy przekładni)
- Projekt złącza dla łatwiejszej instalacji (zastępuje tradycyjne przewody)
- Analiza wykresu pracy silnika dostarczona (prędkość vs moment obrotowy przy 48V; strefy nieoperacyjne / krótkoterminowa praca / ciągła praca)
Specyfikacje
| Zastosowanie | Egzoszkielet |
| Sposób napędu | FOC |
| Temperatura otoczenia pracy | -20℃~50℃ |
| Typ uzwojenia | delta |
| Klasa izolacji | H |
| Izolacja Wysokiego napięcia | 1000V 5mA/2s |
| Opór izolacji | 1000V10MΩ |
| Faza | 3 |
| Pary biegunów | 21 |
| Napięcie znamionowe (V) | 48 |
| Obroty na biegu jałowym (rpm) | 4320 |
| Moment obrotowy znamionowy (Nm) | 1.3 |
| Prędkość znamionowa (rpm) | 3580 |
| Prąd znamionowy (ADC) | 12.3 |
| Moment szczytowy (Nm) | 4 |
| Prąd szczytowy (ADC) | 38.6 |
| Kv (rpm/V) | 90 |
| Kt (Nm/A) | 0.107 |
| Ke (V/krpm) | 10.58 |
| Opór fazy do fazy (mΩ) | 125 |
| Indukcyjność fazy do fazy (μH) | 87 |
| Bezwładność (gcm²) | 759.98 |
| Km (Nm/√W) | 0.3026 |
| Czas mechaniczny (ms) | 0.83 |
| Czas elektryczny (ms) | 0.70 |
| Waga (g) | 354 |
| Maksymalny stosunek momentu obrotowego do wagi (Nm/kg) | 11.3 |
| Faza silnika U V W | Referencyjny rysunek inżynieryjny |
| Port czujnika Hall'a | VCC, GND, Hu, Hv, HW (referencyjny rysunek inżynieryjny) |
| Korespondencja | Hu-U; Hv-V; Hw-W |
Zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Podręczniki / Dokumenty
W przypadku pytań dotyczących okablowania/wyboru sterownika lub pomocy w dokumentacji, skontaktuj się z pomocą techniczną przez https://rcdrone.top/ lub e-mail [email protected].
Uwaga z dostarczonej tabeli: Wszystkie dane mają charakter informacyjny | Podlegają zmianom bez powiadomienia.
Szczegóły

CubeMars R80 KV110 jest zaprojektowany do kompaktowych stawów robotycznych i napędów egzoszkieletowych, z niskoprofilowym siłownikiem-stylem.

Zintegrowane czujniki Halla zapewniają informacje zwrotne o położeniu wirnika dla stabilnej kontroli FOC, z dokładnością kąta elektrycznego ocenianą na ±10°.

Specjalny projekt odprowadzania ciepła wykorzystuje ultracienką podstawę i silikonową podkładkę o wysokiej przewodności cieplnej, aby pomóc w zarządzaniu temperaturą w kompaktowych konstrukcjach.

Wzór otworów montażowych na dzwonie upraszcza mocowanie przekładni harmonicznej, flanszy lub innych typów przekładni.
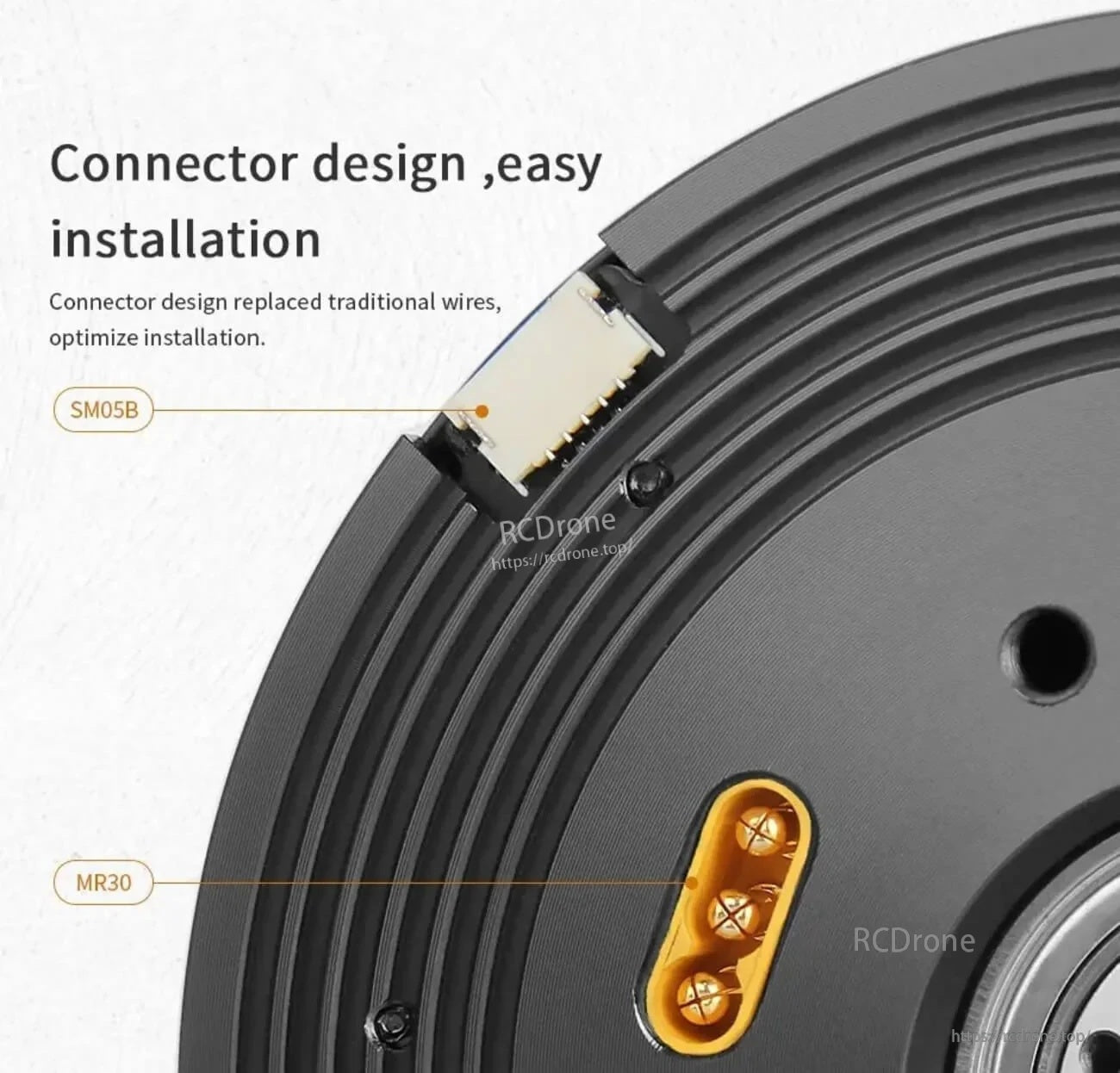
Okablowanie w stylu złącza zastępuje tradycyjne luźne przewody, co umożliwia czystszy i szybszy montaż połączeń zasilania i czujników.
Optymalizowany projekt elektromagnetyczny ma na celu niskie momenty zrywu i niską bezwładność wirnika dla płynniejszej kontroli ruchu.

Zapewnia stabilne działanie w przypadku robotów z nogami o dużym obciążeniu oraz innych zastosowań z wysokim momentem obrotowym, gdzie stabilność wyjścia ma znaczenie.

Wykres prędkości w stosunku do momentu obrotowego 48V pomaga wybrać bezpieczny ciągły zakres i zrozumieć krótkoterminowe możliwości szczytowe.
Related Collections





