






Silnik momentowy bezramowy CubeMars RI100 KV105 typu inrunner do ramienia cobota, egzoszkieletu, ramienia robotycznego
Silnik momentowy bezramowy CubeMars RI100 KV105 typu inrunner do ramienia cobota, egzoszkieletu, ramienia robotycznego
CubeMars
Nie można załadować gotowości do odbioru
Przegląd
Silnik CubeMars RI100 KV105 bezramkowy inrunner to silnik BLDC o wysokiej wydajności, zaprojektowany do precyzyjnych zastosowań, takich jak ramiona cobotów, egzoszkielety, roboty kroczące oraz ramiona robotyczne. Działa w zakresie 12V–48V, dostarczając do 4,95 Nm momentu szczytowego, przy zachowaniu kompaktowych wymiarów i niskiego momentu bezwładności dla płynnej i precyzyjnej kontroli ruchu. Dzięki bezramkowej, inrunnerowej konstrukcji, oferuje doskonałą gęstość momentu, stabilność termiczną oraz elastyczność dla niestandardowej integracji w ciasnych lub lekkich strukturach robotycznych.
Kluczowe cechy
-
Szeroki zakres napięcia: Kompatybilny z zasilaczami 24V, 36V i 48V.
-
Wysoka precyzja kontroli: Obsługuje rozdzielczości enkoderów do 0.01°, kompatybilny z Renishaw i Sick enkoderami.
-
Niski moment zacięcia: Umożliwia płynniejszą rotację i niski hałas—idealny do dynamicznych stawów robotów.
-
Krzywoliniowy wirnik z magnesem stałym: Optymalizowany do sterowania napędem sinusoidalnym BEMF, zapewniający lepszą responsywność i wydajność.
-
Ręcznie nawijany stator: 0,5 mm luzu i wysoki współczynnik wypełnienia dla wysokiego momentu obrotowego i niskiej bezwładności (215,5 g·cm²).
-
Wysoka tolerancja termiczna: Wspiera środowiska pracy od -40°C do 85°C (struktura silnika testowana w temperaturze od -20°C do 50°C).
-
Lekki i kompaktowy: Waży tylko 500g z maksymalnym stosunkiem momentu do wagi wynoszącym 9,9 Nm/kg.
Specyfikacje
Parametry ogólne
| Parametr | Wartość |
|---|---|
| Zastosowanie | Ramię Cobot / Egzoszkielet |
| Typ silnika | Silnik BLDC bezramowy |
| Faza | 3 |
| Typ uzwojenia | Delta |
| Pary biegunowe | 14 |
| Waga | 500g |
| Stosunek momentu obrotowego do wagi | 9.9 Nm/kg |
Charakterystyka elektryczna
| Parametr | Wartość |
|---|---|
| Napięcie znamionowe (V) | 24 / 36 / 48 |
| Moment obrotowy znamionowy (Nm) | 1.76 |
| Moment obrotowy szczytowy (Nm) | 4.95 |
| Obroty znamionowe (rpm) | 1370 / 2100 / 2825 |
| Obroty na luzie (rpm) | 2184 / 3276 / 4368 |
| Prąd znamionowy (ADC) | 13.6 |
| Prąd szczytowy (ADC) | 38.6 |
| Kv (rpm/V) | 105 |
| Kt (Nm/A) | 0.129 |
| Ke (V/krpm) | 10.47 |
| Km (Nm/√W) | 0.3634 |
| Opór (mΩ) | 126 |
| Indukcyjność (µH) | 366.7 |
| Czas mechaniczny (ms) | 0.16 |
| Czas elektryczny (ms) | 2.91 |
| Bezwładność (g·cm²) | 215.5 |
Okablowanie złączy
| Sygnal | Specyfikacja kabla |
|---|---|
| U | Czarny + 16# przewód silikonowy |
| V | Żółty + 16# przewód silikonowy |
| W | Czerwony + 16# przewód silikonowy |
| Hu | Żółty + 30# przewód silikonowy |
| Hv | Zielony + 30# przewód silikonowy |
| Hw | Niebieski + 30# przewód silikonowy |
| VCC GND | Czerwony + 30# i Czarny + 30# przewody |
Korespondencja okablowania: Hu-U, Hv-V, Hw-W
Dodatkowe wyróżnienia
RI100 Rotor Wersja Podwyższona: Wysokość rotora zwiększona o 2mm, aby poprawić kompatybilność z czujnikami Halla.
-
Doskonałość ręcznego nawijania: Precyzyjnie nawinięte miedziane cewki z luzem 0,5 mm dla lepszego montażu i wysokiej gęstości momentu obrotowego.
-
Krzywoliniowy wirnik z magnesem stałym: Zapewnia poprawione charakterystyki BEMF dla lepszej sinusoidalnej kontroli.
-
Opcje enkodera na zamówienie: Obsługuje różnorodne enkodery o wysokiej precyzji, w tym Renishaw i Sick.
-
Optymalizacja zaangażowania zębatek: Zaprojektowane z niskim momentem zacięcia i doskonałą dynamiką zębatek, zapewniając niski hałas, płynne działanie i silne przyspieszenie.
Aplikacje
-
Współpracujące ramiona robotyczne (Cobot)
-
Noszone egzoszkielety robotyczne
-
Roboty kroczące/czworonogi
-
Precyzyjne stawy robotyczne i efektory końcowe
-
Kompaktowe systemy automatyzacji i inspekcji
Pobrania ręczne
![]() RI100 z czujnikiem Halla-2D.pdf
RI100 z czujnikiem Halla-2D.pdf
![]() RI100 bez czujnika Halla-3D.zip
RI100 bez czujnika Halla-3D.zip
![]() RI100 z czujnikiem Halla-3D.zip
RI100 z czujnikiem Halla-3D.zip
Szczegóły
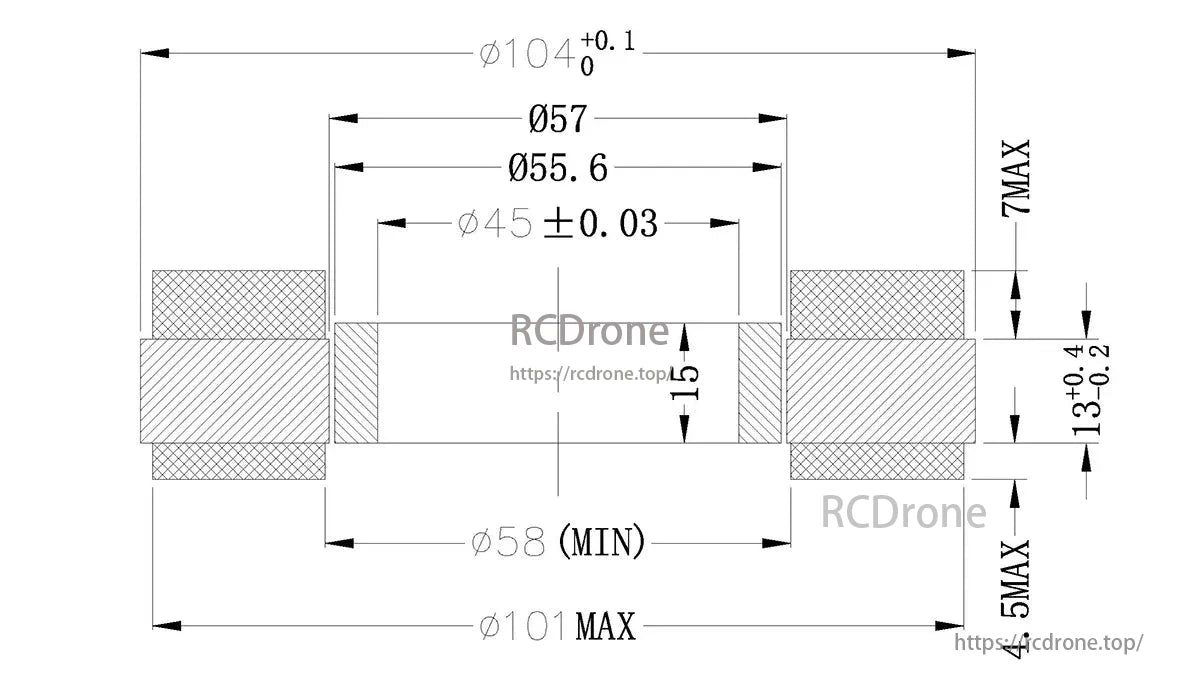
Wymiary silnika momentu obrotowego CubeMars RI100: Ø104, Ø57, Ø55.6, Ø45, 15mm, Ø58, Ø101.
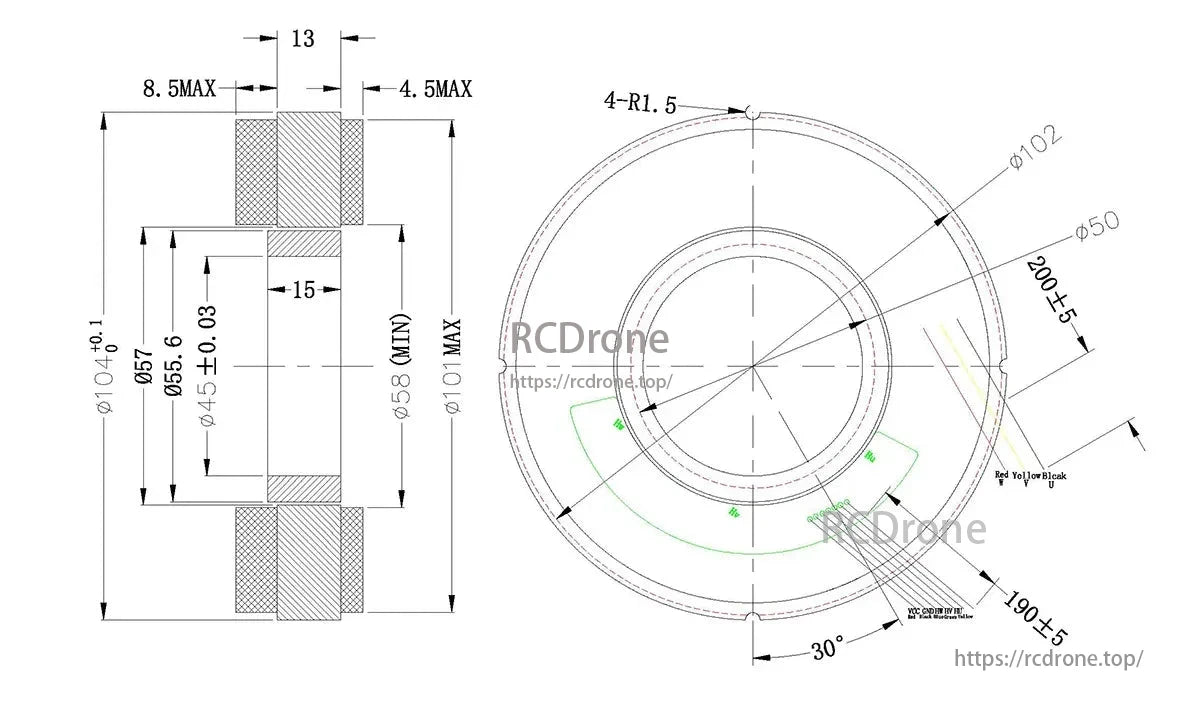
Wymiary silnika momentu obrotowego: Ø104, Ø57, Ø55.6, Ø45±0.03, Ø58, Ø101 max, 200±5, 190±5, kąt 30°, cechy 4-R1.5.
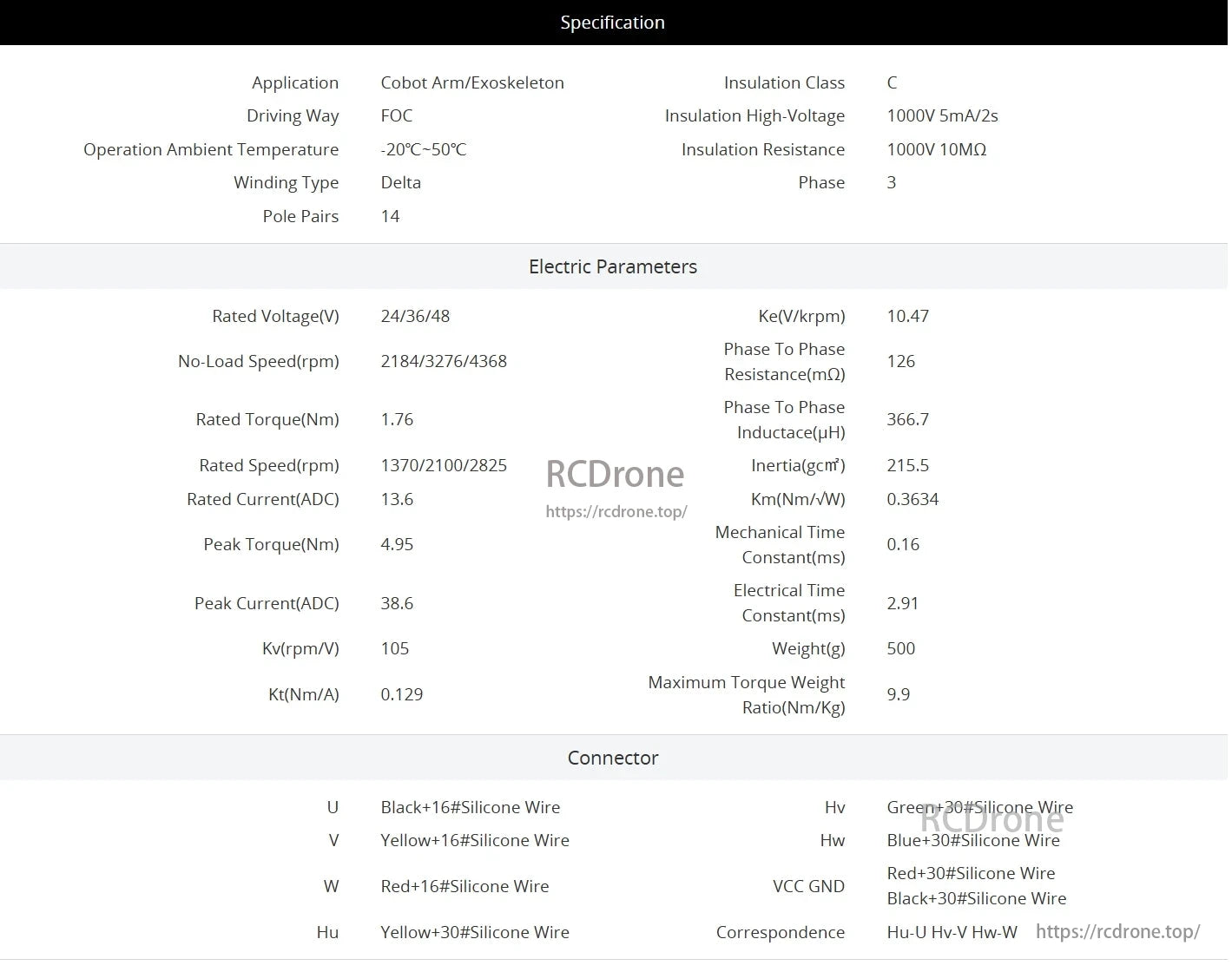
CubeMars Silnik momentu obrotowego RI100: 24/36/48V, moment 1.76Nm, 1370/2100/2825rpm, prąd 13.6A, szczyt 38.6A, 10.47V/krpm, indukcyjność 366.7μH, bezwładność 215.5gcm², maksymalny stosunek momentu do wagi 9.9Nm/Kg, praca w temperaturze od -20°C do 50°C.

Wykres analizy CubeMars RI100. Wyświetla moment (N.m) w porównaniu do mocy wyjściowej (W), wydajności, prądu (A) i prędkości (RPM). Wykres podkreśla charakterystyki wydajności silnika przy różnych obciążeniach.
Silnik momentowy CubeMars RI100: Niższy moment zacięcia, płynna praca, niski hałas, silna dynamika.
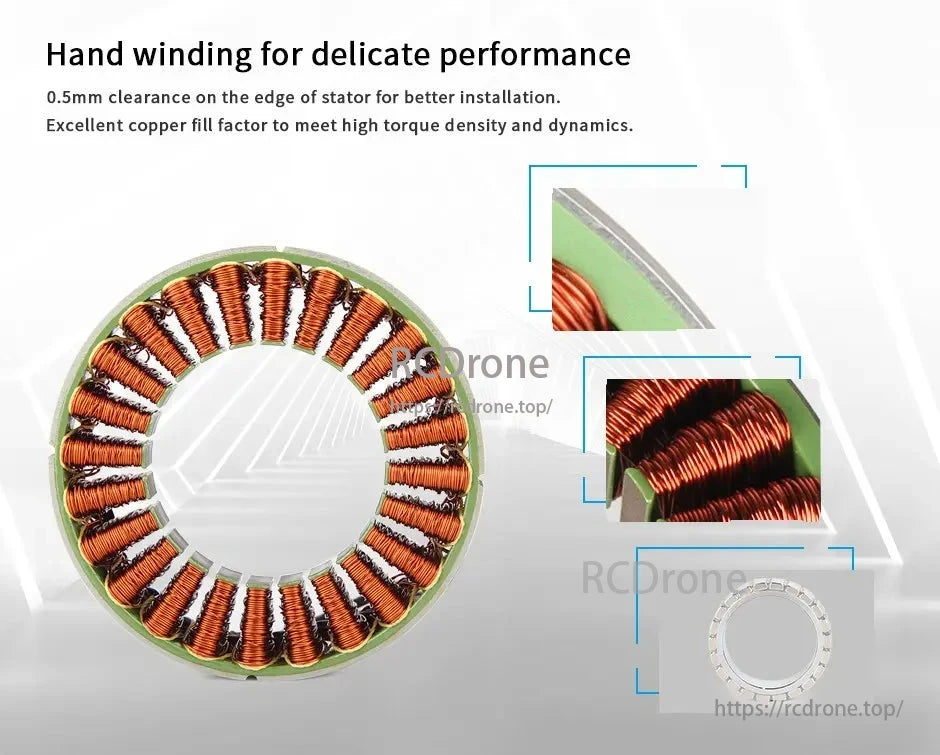
Ręcznie nawijany stator z luzem 0,5 mm dla optymalnej wydajności.

Wzmocniona wersja rotora RI100. Całkowita wysokość zwiększona o 2 mm dla lepszego wykrywania przez czujnik Halla.
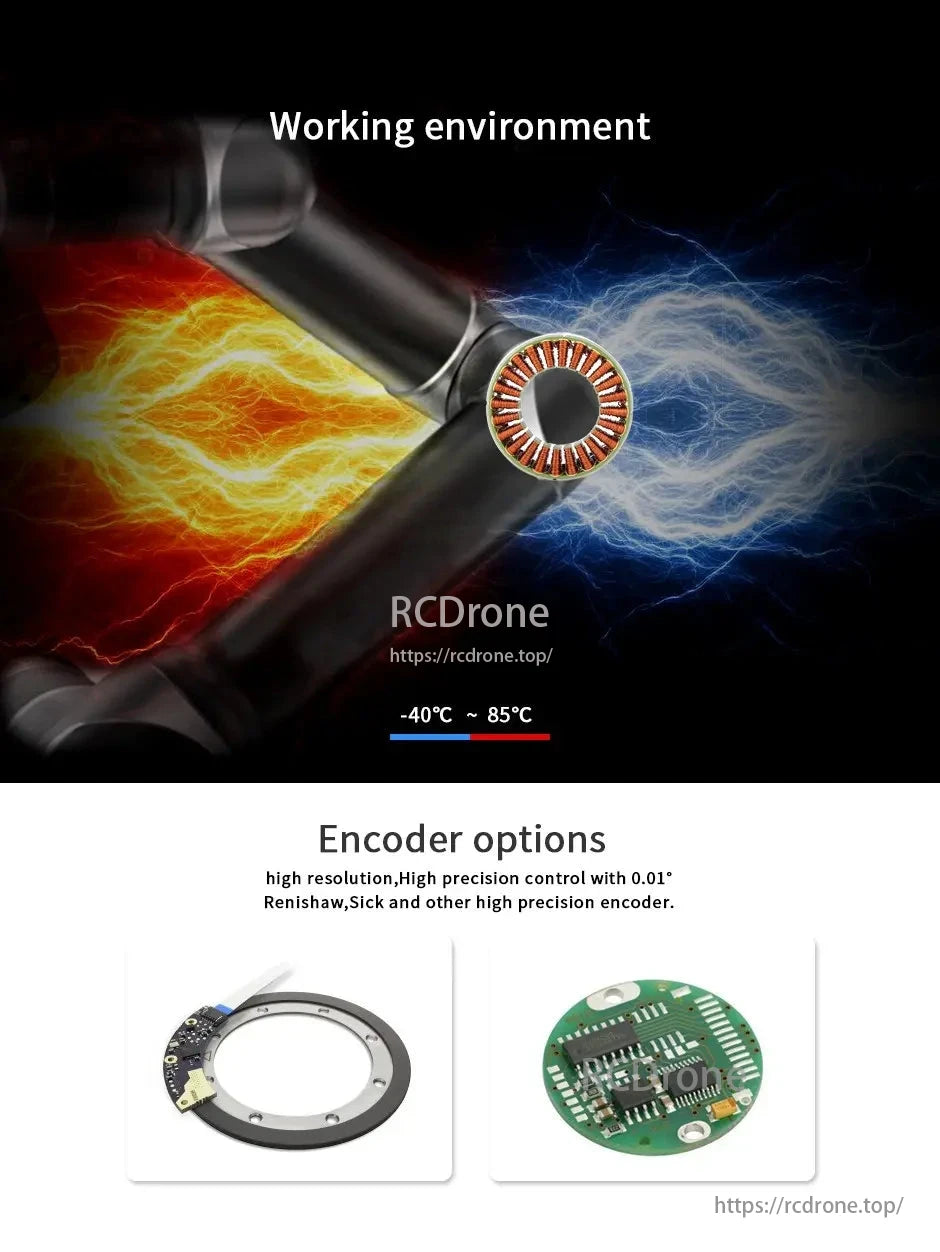
Silnik momentowy CubeMars RI100: -40°C do 85°C, opcje enkodera o wysokiej precyzji.
Related Collections






