




CubeMars RI60 KV120 Bezramkowy silnik momentu obrotowego Inrunner | 0,57Nm, 120KV, 48V BLDC do cobotów i egzoszkieletów
CubeMars RI60 KV120 Bezramkowy silnik momentu obrotowego Inrunner | 0,57Nm, 120KV, 48V BLDC do cobotów i egzoszkieletów
CubeMars
Nie można załadować gotowości do odbioru
Przegląd
Silnik CubeMars RI60 KV120 bezramkowy Inrunner został zaprojektowany do kompaktowych, wysokowydajnych zastosowań robotycznych. Obsługując napięcia robocze 24V/36V/48V, ten bezramkowy silnik BLDC zapewnia wysoką gęstość momentu obrotowego, płynny ruch o niskim zacięciu oraz precyzyjną rozdzielczość kontroli 0,01°. Z kompaktową średnicą zewnętrzną Φ60mm i wagą zaledwie 155,9g, jest idealny do ramion cobotów, egzoszkieletów oraz stawów robotycznych w warunkach ograniczonej przestrzeni.
Ten silnik charakteryzuje się ręcznie nawijanym statorem dla optymalnego współczynnika wypełnienia miedzi, wygiętymi magnesami trwałymi dla efektywnej sinusoidalnej odpowiedzi BEMF oraz opcjami integracji czujnika Halla i enkodera.Obsługuje sterowanie zorientowane na pole (FOC), działa niezawodnie w temperaturze od -20°C do 50°C i wytrzymuje do 1,63 Nm momentu szczytowego. Wersja zwiększonego wirnika poprawia dokładność czujnika Halla, zwiększając zasięg detekcji o 2 mm.
Kluczowe cechy
-
Bezramkowy projekt BLDC Inrunner – Brak zewnętrznej obudowy, idealny do instalacji wbudowanych
-
Wysoka gęstość momentu – Maksymalny stosunek momentu do wagi wynoszący 10,46 Nm/kg
-
Precyzyjna kontrola – Kompatybilny z enkoderami o wysokiej rozdzielczości, wspiera 0.01° pozycjonowanie
-
Niski moment zrywania – Płynna praca, zredukowane wibracje i hałas
-
Odporność na temperaturę – Działa w temperaturach otoczenia od -20°C do 50°C
-
Wielokrotne interfejsy sterujące – Obsługuje sprzężenie zwrotne z enkodera i czujnika Halla
-
Ręcznie nawijany wirnik – Doskonałe wypełnienie miedzią, 0.5mm odstęp krawędzi dla łatwego montażu
-
Opcjonalna wersja wirnika – +2mm wysokości wirnika poprawia wyrównanie czujnika Halla
Specyfikacje techniczne
Aplikacja i konfiguracja
| Parametr | Wartość |
|---|---|
| Aplikacja | Ramię cobota / Egzoszkielet |
| Sposób napędu | FOC |
| Faza | 3 fazy |
| Typ uzwojenia | Delta |
| Pary biegunowe | 14 |
| Klasa izolacji | C |
| Napięcie izolacji | 500V 5mA/2s |
| Opór izolacji | 500V 10MΩ |
| Temperatura pracy | -20℃ ~ 50℃ |
Charakterystyka elektryczna
| Parametr | Wartość |
|---|---|
| Napięcie znamionowe (V) | 24 / 36 / 48 |
| Obroty na biegu jałowym (rpm) | 2532 / 3798 / 5064 |
| Obroty znamionowe (rpm) | 1440 / 2320 / 3190 |
| Moment znamionowy (Nm) | 0.57 |
| Moment szczytowy (Nm) | 1.63 |
| Prąd znamionowy (ADC) | 5.6 |
| Prąd szczytowy (ADC) | 16.8 |
| Kv (rpm/V) | 120 |
| Ke (V/krpm) | 9.03 |
| Kt (Nm/A) | 0.100 |
| Opór fazowy (mΩ) | 900 |
| Indukcyjność fazowa (μH) | 877.5 |
| Bezładność (g·cm²) | 33.05 |
| Km (Nm/√W) | 0.1054 |
| Czas stały mechaniczny (ms) | 0.3 |
| Czas stały elektryczny (ms) | 0.98 |
| Waga (g) | 155.9 |
| Stosunek momentu obrotowego do wagi | 10.46 Nm/kg |
Opcje enkodera i czujnika Halla
-
Z czujnikiem Halla: Ulepszona detekcja wirnika, zalecana do precyzyjnego wykrywania pozycji
-
Bez czujnika Halla: Kompaktowa konstrukcja do ograniczonych przestrzeni
-
Obsługiwane enkodery: Renishaw, Sick, inne enkodery o wysokiej precyzji (0.01° rozdzielczość)
Wymiary mechaniczne
| Wersja | Średnica zewnętrzna | Średnica wewnętrzna | Wysokość wirnika | Maksymalna grubość |
|---|---|---|---|---|
| Bez Halla | Ø60 mm | Ø30 mm | 15 mm | 21 mm (maks) |
| Z Halla | Ø60 mm | Ø30 mm | 15 mm | 23 mm (maks) |
Odwołaj się do rysunków technicznych w celu uzyskania dokładnych tolerancji i wzorów otworów montażowych.
Krzywa wydajności
Testowane przy 24VDC:
-
Maksymalna wydajność przy ~0.3 Nm
-
Maksymalna moc wyjściowa >125W przy ~1.1 Nm
-
Max prędkość ~2500 RPM
-
Stabilna odpowiedź prądowa w całym zakresie momentu obrotowego
Informacje o okablowaniu i złączach
| Przewód | Kolor + Rozmiar |
|---|---|
| U | Czarny + 18# Silikon |
| V | Żółty + 18# Silikon |
| W | Czerwony + 18# Silikon |
| Hu | Niebieski + 30# Silikon |
| Hv | Zielony + 30# Silikon |
| Hw | Żółty + 30# Silikon |
| VCC | Czerwony + 30# Silikon |
| GND | Czarny + 30# Silikon |
Mapa okablowania:
Hu-U, Hv-V, Hw-W
Pobieranie instrukcji
![]() RI60 z czujnikiem Halla-2D.pdf
RI60 z czujnikiem Halla-2D.pdf
![]() RI60 bez czujnika Halla-3D.zip
RI60 bez czujnika Halla-3D.zip
![]() RI60 z czujnikiem Halla-3D.zip
RI60 z czujnikiem Halla-3D.zip
Zastosowania
-
Roboty współpracujące
-
Stawy egzoszkieletu
-
Roboty kroczące i czworonogi
-
Precyzyjna robotyka medyczna
-
Moduły serwo wbudowane
Szczegóły
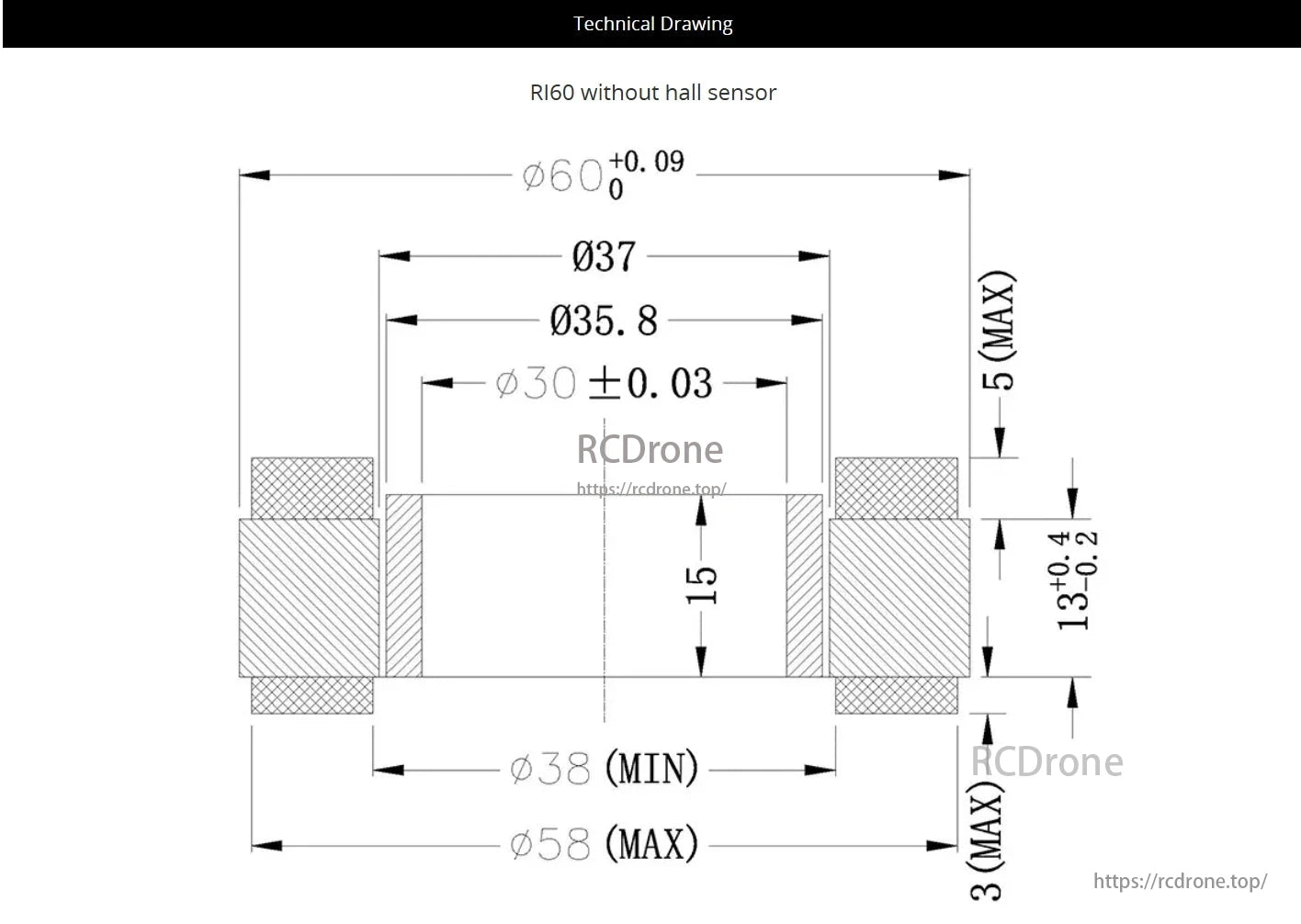
CubeMars Wymiary silnika RI60: Ø60, Ø37, Ø35.8, Ø30, Ø38 (min), Ø58 (max), długość 15, maksymalna wysokość 5, 13 ±0.4 szerokość.
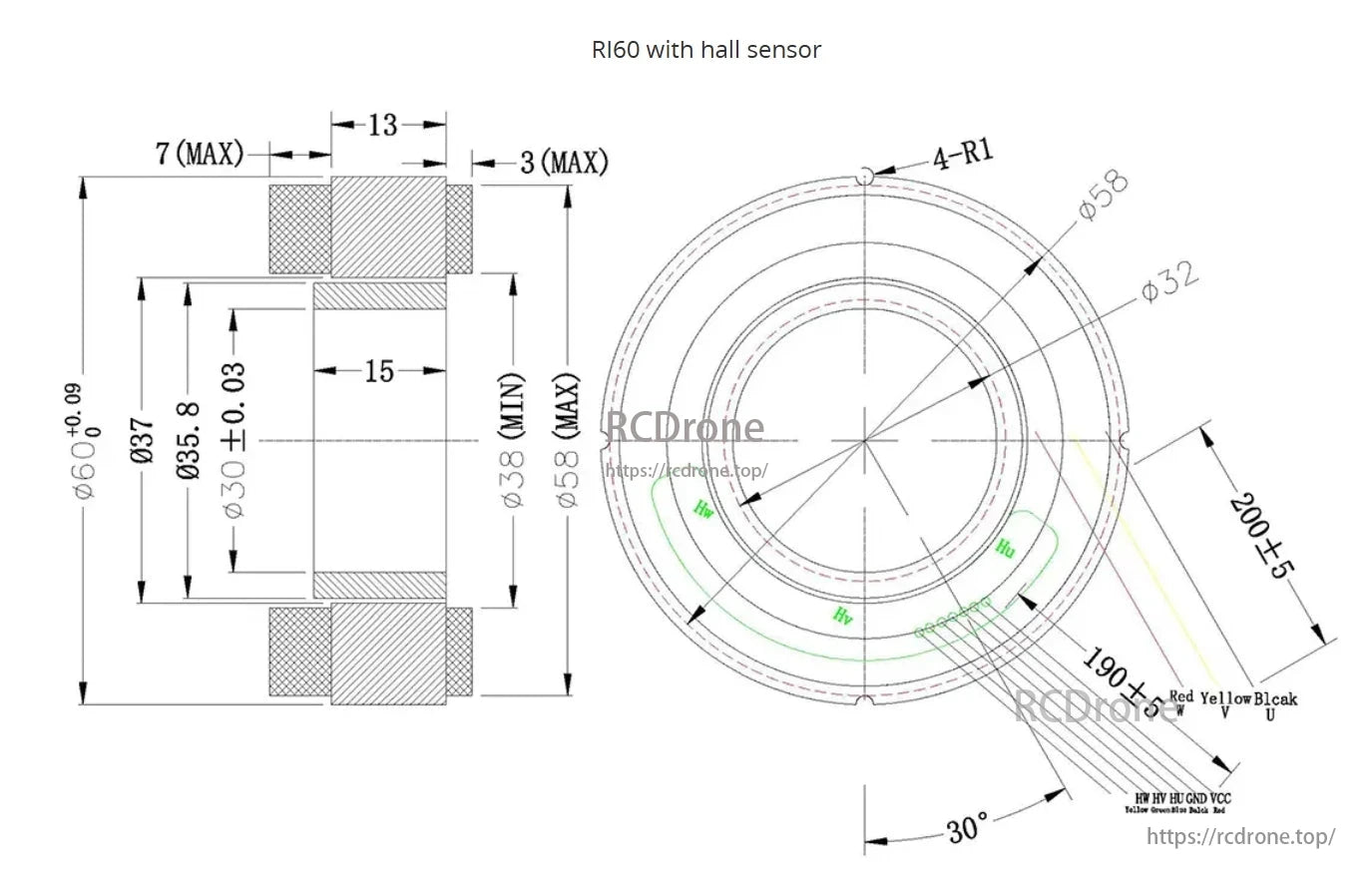
Silnik CubeMars RI60 z czujnikiem Halla. Wymiary: średnica 60 mm, długość 200 mm. Oznaczenia: 4-R1, φ58, φ32 oraz kąt 30°. Zawiera etykiety HW, HV, HU.
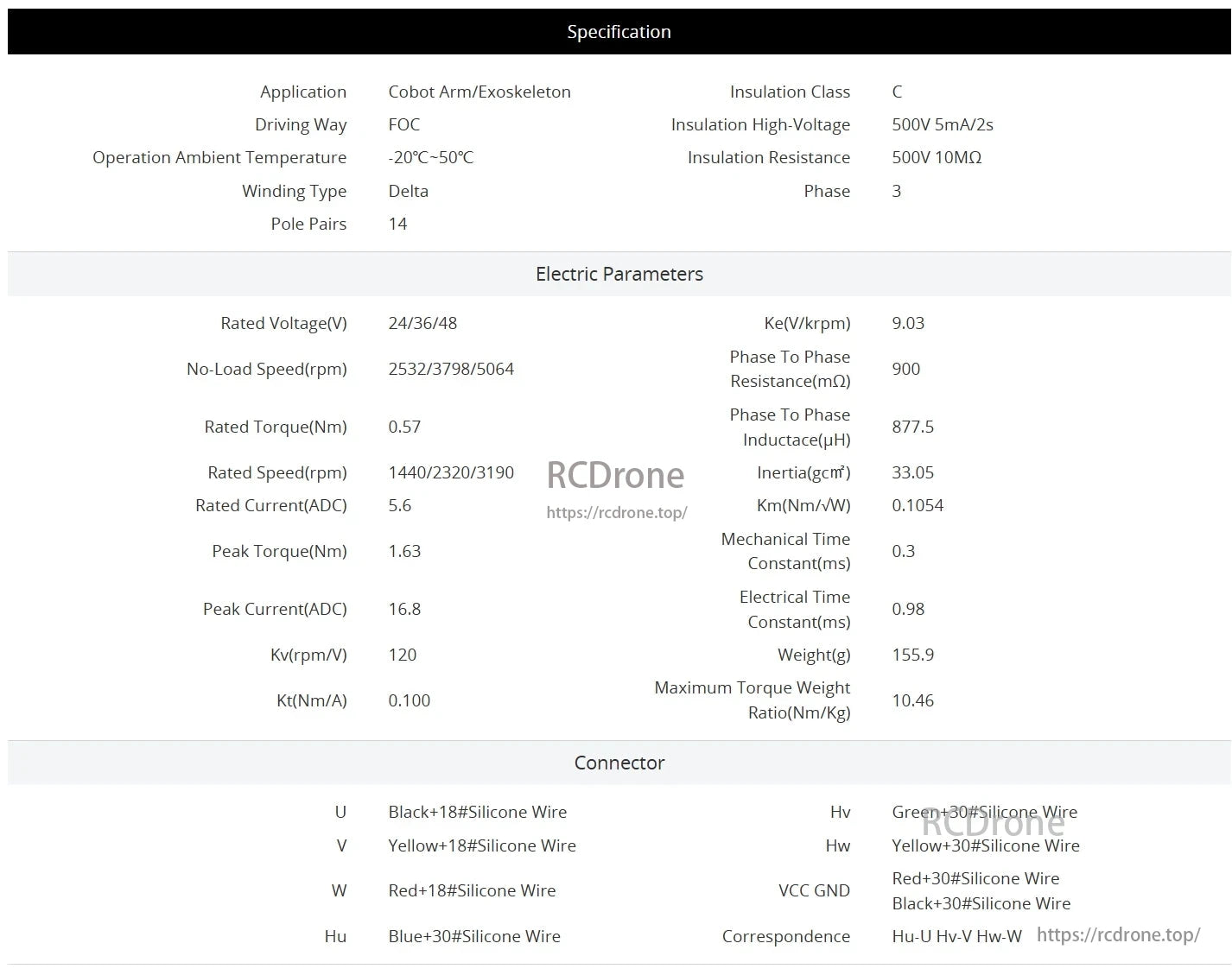
Silnik CubeMars RI60: zastosowanie w ramieniu cobota/egzoszkielecie, napęd FOC, praca w temperaturze -20°C-50°C, 14 par biegunów. Napięcie znamionowe 24/36/48V, prędkość bez obciążenia 2532/3798/5064 obr/min, moment obrotowy znamionowy 0.57Nm, moment obrotowy szczytowy 1.63Nm.
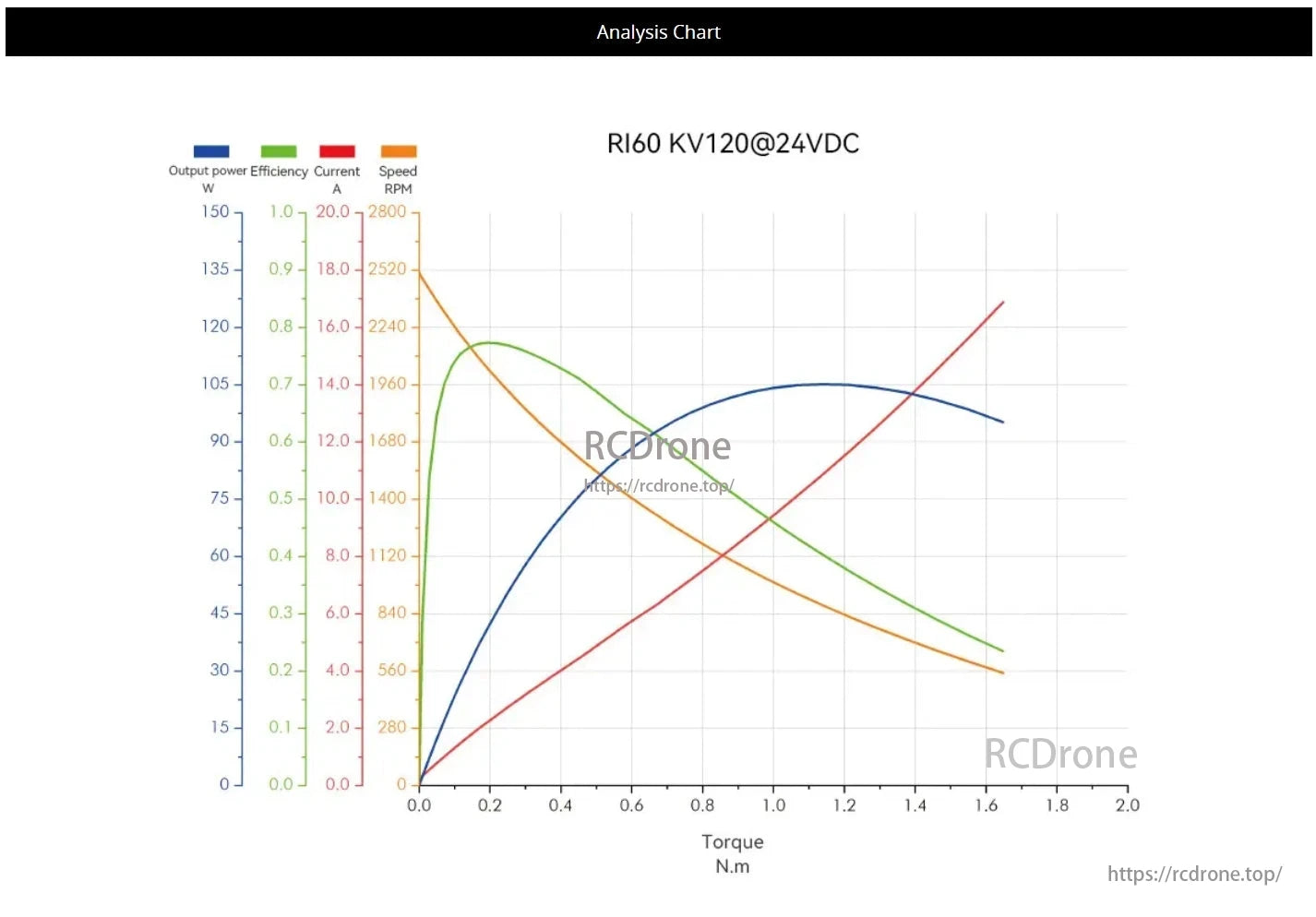
Wykres analizy silnika CubeMars RI60 na KV120@24VDC. Dispprzedstawia moc wyjściową, sprawność, prąd i prędkość w zależności od momentu obrotowego. Sprawność osiąga maksimum w pobliżu 0.2 N.m, przy czym prędkość maleje w miarę wzrostu momentu obrotowego.
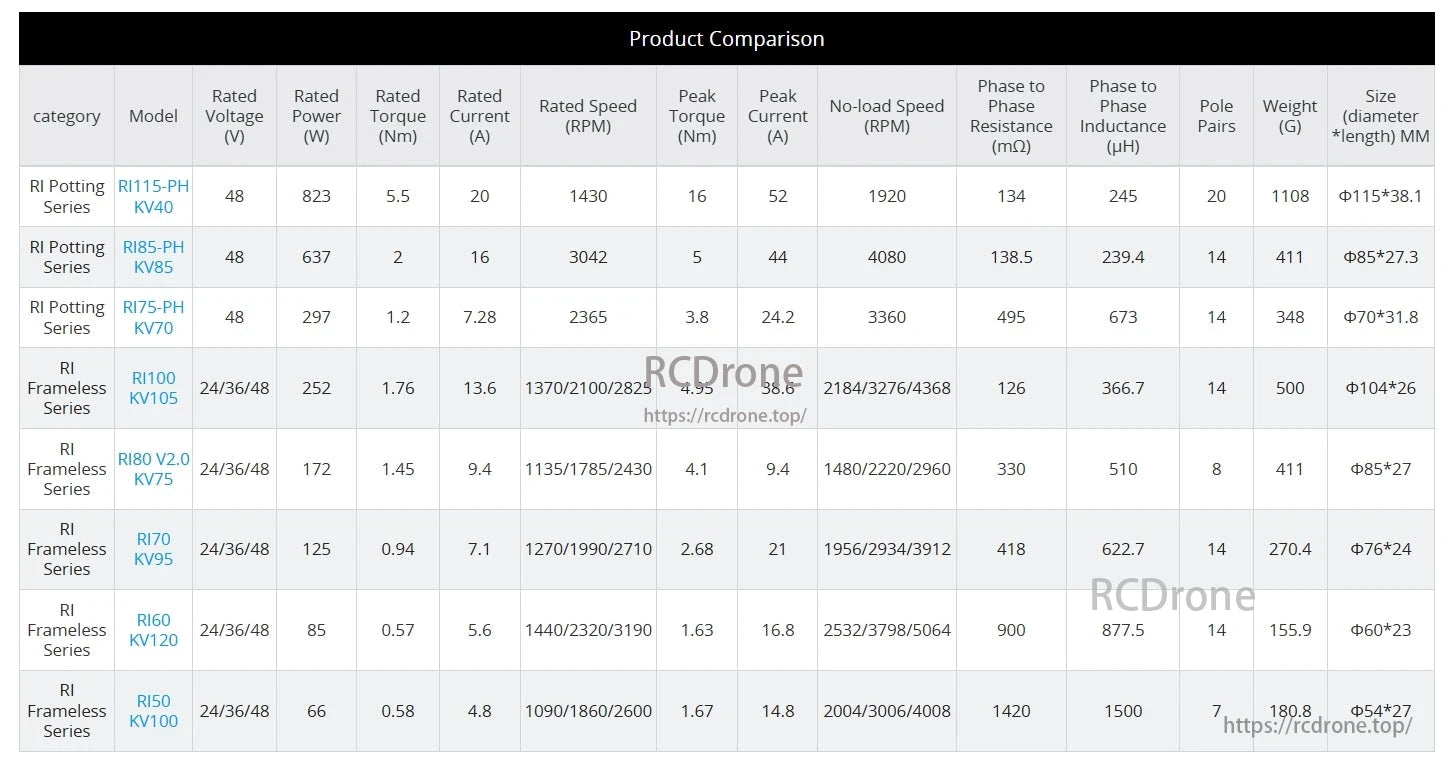
Silnik CubeMars RI60 KV120: 24/36/48V, 85W, moment obrotowy 0.57Nm, prąd 5.6A, prędkość 1440/2320/3190 RPM, moment obrotowy szczytowy 1.63Nm, prąd szczytowy 16.8A, opór 900mΩ, indukcyjność 877.5µH, 14 par biegunów, waga 155.9g, rozmiar φ60*23mm.

Silnik CubeMars RI60: Niższy moment zrywu, płynna praca, niski hałas, silna dynamika.

Ręcznie nawijany stator z luzem 0,5 mm dla optymalnej wydajności.

Wygięty magnes trwały dla silnika BEMF Sinus, zapewniający łatwą kontrolę.

Wzmocniona wersja wirnika RI60. Całkowita wysokość zwiększona o 2 mm dla lepszego wykrywania przez czujnik Halla.
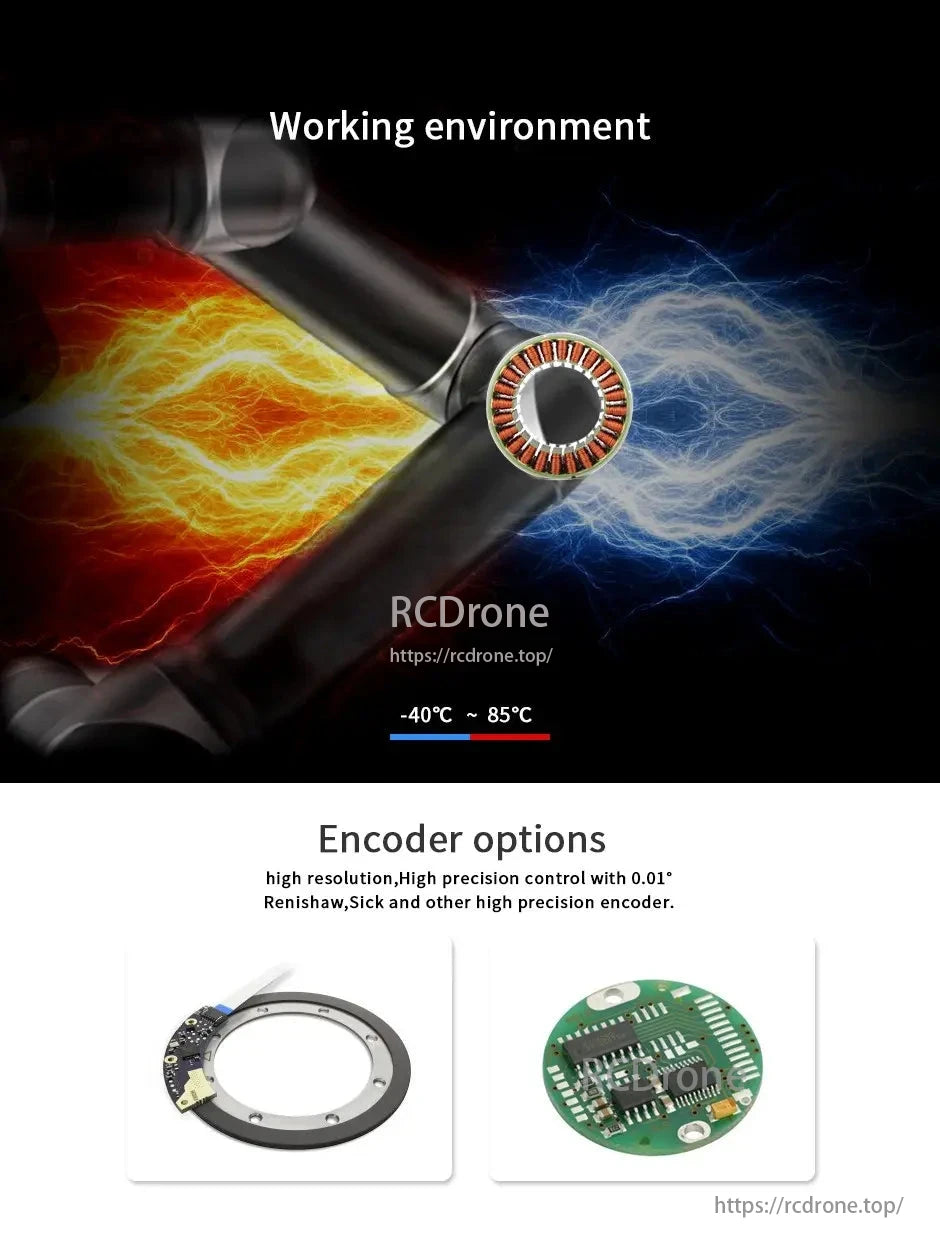
Silnik CubeMars RI60: -40°C do 85°C, opcje enkodera o wysokiej rozdzielczości.
Related Collections




