



DAMIAO DM-2325 24 V, 380 obr./min, 5 N·m Silnik do robota z przekładnią 1:25, CAN/FD CAN i enkoderem inkrementalnym
DAMIAO DM-2325 24 V, 380 obr./min, 5 N·m Silnik do robota z przekładnią 1:25, CAN/FD CAN i enkoderem inkrementalnym
DAMIAO
Cena regularna
$45.00 USD
Cena regularna
Cena promocyjna
$45.00 USD
Cena jednostkowa
na
Z wliczonymi podatkami.
Koszt wysyłki obliczony przy realizacji zakupu.
Nie można załadować gotowości do odbioru
Przegląd
Silnik Robotyczny DAMIAO DM-2325 to kompaktowe urządzenie zaprojektowane do precyzyjnej kontroli ruchu w robotyce. Posiada sprzężenie zwrotne z enkodera inkrementalnego, interfejsy sterowania CAN/FD oraz konfigurację UART. Z redukcją 1:25, zasilaniem 24 V i zdefiniowanymi trybami sterowania, nadaje się do zastosowań wymagających niezawodnej regulacji prędkości i pozycji.
Kluczowe cechy
- Model: DM-2325
- Napięcie nominalne: 24 V
- Prąd nominalny: 5 A / 3.2 A; Prąd szczytowy: 13 A / 7.5 A
- Moment nominalny: 5 N·m; Moment szczytowy: 2 N·m
- Prędkość nominalna: 380 rpm; Maks. prędkość bez obciążenia: 560 rpm
- Redukcja: 1:25; Parzyste bieguny: 7
- Indukcyjność fazy: 75 μH; Opór fazy: 0.2915 Ω
- Maksymalne obciążenie promieniowe: 395 N
- Wymiary: średnica zewnętrzna 28 mm; wysokość 77.6 mm
- Waga silnika: 172.
- Typ enkodera: Enkoder inkrementalny
- Interfejs sterowania: CAN@1 Mbps (maks.), FD CAN@5 Mbps (maks.)
- Interfejs konfiguracyjny: UART@921600 bps
- Tryby sterowania: Tryb MIT, Tryb prędkości, Tryb pozycji
Specyfikacje
| Model | DM-2325 | |
| Napięcie nominalne | 24 V | |
| Prąd nominalny | 5 A / 3.2 A | |
| Prąd szczytowy | 13 A / 7.5 A | |
| Moment nominalny | 5 N·m | |
| Moment szczytowy | 2 N·m | |
| Prędkość nominalna | 380 rpm | |
| Maks. prędkość bez obciążenia | 560 rpm | |
| Stosunek redukcji | 1:25 | |
| Pary biegunów | 7 | |
| Indukcyjność fazy | 75 μH | |
| Opór fazy | 0.html | 2915 Ω |
| Maksymalne obciążenie promieniowe | 395 N | |
| Średnica zewnętrzna | 28 mm | |
| Wysokość | 77.6 mm | |
| Waga silnika | 172.2 g | |
| Typ enkodera | Enkoder inkrementalny | |
| Interfejs sterujący | CAN@1 Mbps (maks.), FD CAN@5 Mbps (maks.) | |
| Interfejs konfiguracyjny | UART@921600 bps | |
| Tryby sterowania | Tryb MIT; Tryb prędkości; Tryb pozycji |
Ochrona
- Ochrona przed przegrzaniem napędu; temperatura ochrony: 120 °C. Przegrzanie powoduje wyjście z "trybu włączonego".
- Ochrona przed przegrzaniem silnika; ustawiona zgodnie z wymaganiami użytkowania (zaleca się, aby nie przekraczać 100 °C). Przegrzanie powoduje wyjście z "trybu włączonego".
- Ochrona przed przepięciem silnika; ustawiona zgodnie z wymaganiami użytkowania (zaleca się, aby nie przekraczać 60 V). Przepięcie powoduje wyjście z "trybu włączonego". html
- Ochrona przed utratą komunikacji; jeśli w ustawionym czasie nie zostanie odebrany żaden rozkaz CAN, system wychodzi z "trybu włączonego".
- Ochrona przed przeciążeniem silnika; ustawiana zgodnie z wymaganiami użytkowania (zaleca się, aby nie przekraczać 13 A). Przeciążenie powoduje wyjście z "trybu włączonego".
- Ochrona przed niedoborem napięcia silnika; jeśli napięcie zasilania jest niższe od ustawionej wartości, system wychodzi z "trybu włączonego" (napięcie zasilania nie mniejsze niż 15 V).
Zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Podręczniki i pobieranie
- DM_2325_Motor.stp
- DM_2325_Motor_armature.stp
- DM-2325_rysunek_instalacji.pdf
- DM-2325_rysunek_instalacji_armatury.pdf
Rysunek instalacji
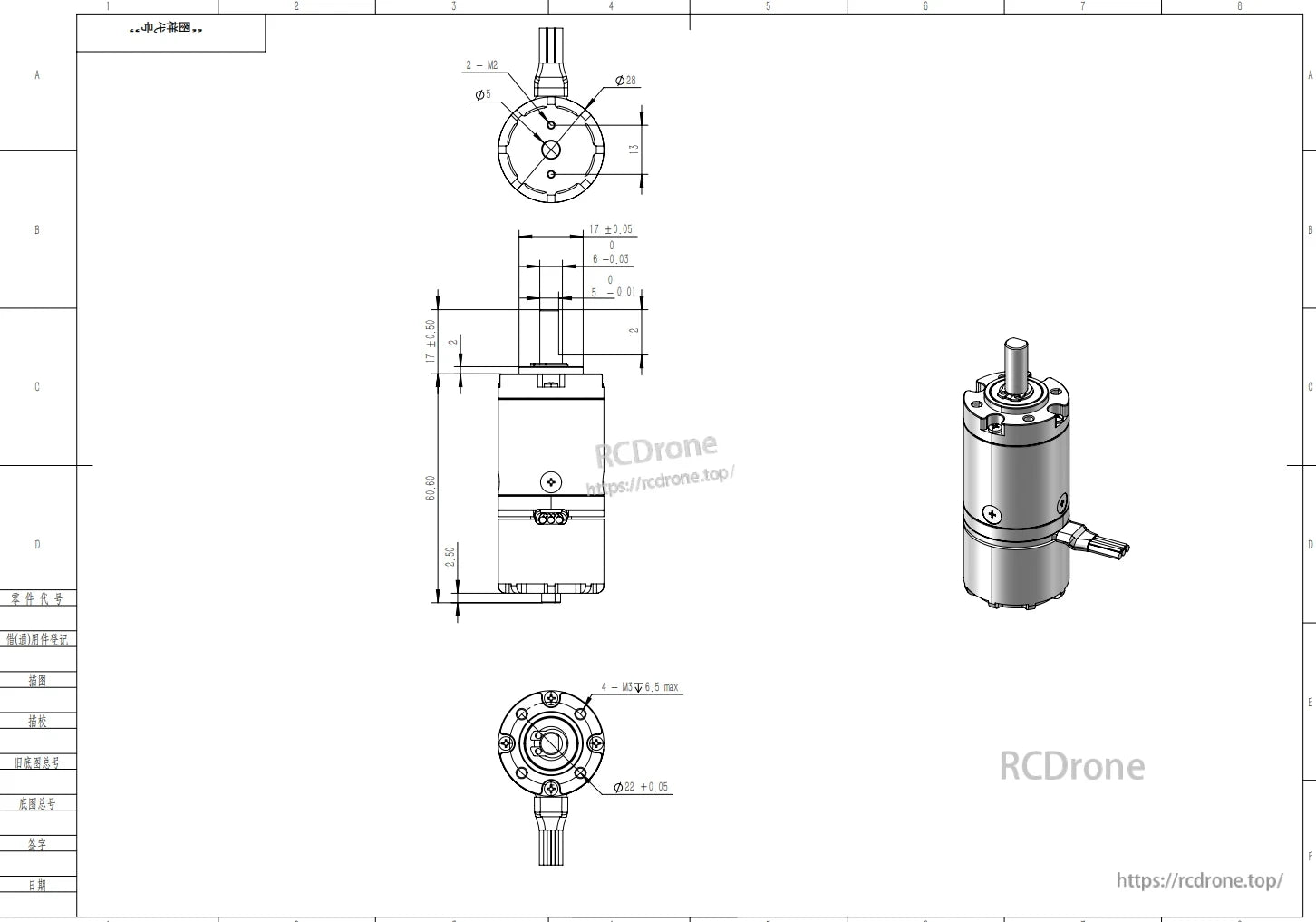
Techniczny rysunek silnika robota z wymiarami i specyfikacjami
Techniczny rysunek silnika robota z wymiarami i specyfikacjami

Techniczny rysunek silnika robota z wymiarami i widokiem 3D
Related Collections




- Zaznaczenie wyboru powoduje całkowite odświeżenie strony.
- Otwiera się w nowym oknie.