




DFRobot SEN0142 MPU6050 6 DOF żyroskop i akcelerometr IMU z cyfrowym procesorem ruchu I2C do Arduino & Robotyka
DFRobot SEN0142 MPU6050 6 DOF żyroskop i akcelerometr IMU z cyfrowym procesorem ruchu I2C do Arduino & Robotyka
DFRobot
Nie można załadować gotowości do odbioru
Przegląd
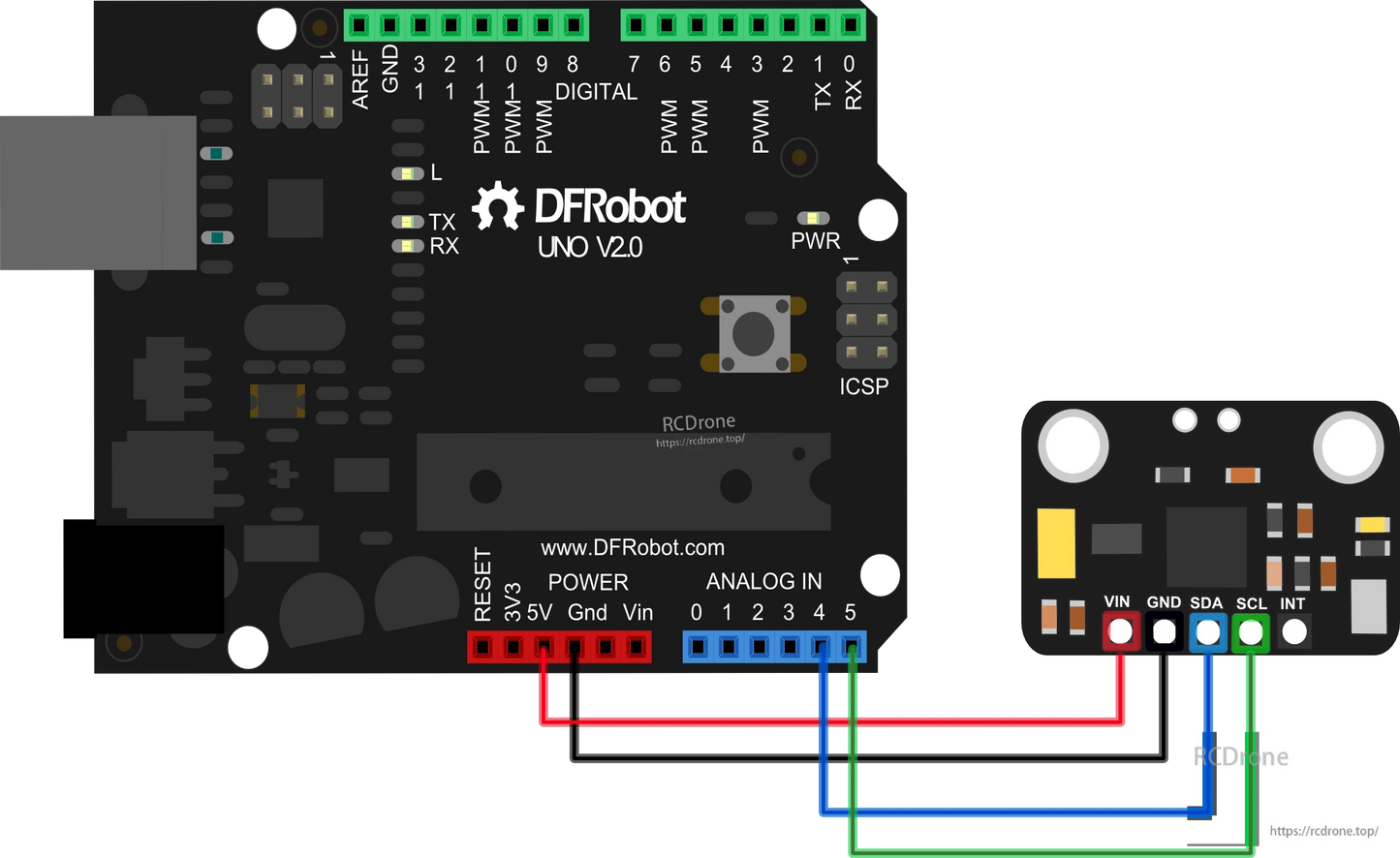
Moduł DFRobot SEN0142 MPU6050 6 DOF IMU integruje żyroskop 3-osiowy oraz akcelerometr 3-osiowy na jednym chipie, dostarczając dokładne dane o ruchu dla robotyki, dronów, urządzeń noszonych oraz projektów Arduino. Wyposażony w Cyfrowy Procesor Ruchu (DMP), obsługuje zaawansowane algorytmy MotionFusion 6-osiowe i 9-osiowe, umożliwiając wyjście danych w postaci kwaternionów, kątów Eulera oraz surowych danych z czujników. Dzięki szerokiemu zakresowi napięcia wejściowego 3V–5V, MPU6050 można bezpośrednio podłączyć do Arduino i innych mikrokontrolerów w celu śledzenia ruchu w czasie rzeczywistym oraz wykrywania gestów.
Kluczowe cechy
-
Łączy żyroskop 3-osiowy i akcelerometr 3-osiowy w jednym chipie
-
Programowalny zakres akcelerometru: ±2g, ±4g, ±8g, ±16g
-
Wrażliwość żyroskopu: ±250, ±500, ±1000, ±2000 dps
-
Cyfrowy procesor ruchu (DMP) do onboard MotionFusion i rozpoznawania gestów
-
Interfejs cyfrowy I2C obsługuje formaty macierzy, kwaternionów, Eulera i surowych danych
-
Wbudowana kalibracja & kompasu dla poprawy dokładności
-
Kompatybilny z Arduino i elektroniką noszoną przez I2Cdevlib
Specyfikacje
-
Napięcie robocze: 3–5 V
Wyjście: I2C cyfrowe (dane MotionFusion 6/9-osiowe)
-
Akcelerometr: programowalny zakres ±2g / ±4g / ±8g / ±16g
-
Żyroskop: czułość ±250 / ±500 / ±1000 / ±2000 dps
-
Format danych: macierz obrotu, kwaternion, kąt Eulera, dane surowe
-
Wymiary: 14 × 21 mm
Aplikacje
-
Wykrywanie ruchu w robotyce
-
Projekty Arduino &i elektroniki DIY
-
Interakcja człowiek-komputer (HCI)
-
Urządzenia noszone i kontrola gestów
-
Systemy nawigacji i równoważenia (e.g., transportery typu Segway)
-
Stabilizacja dronów i śledzenie ruchu
Szczegóły



Przykładowy kod
Proszę pobrać biblioteki dla wszystkich czujników IMU najpierw!




- Zaznaczenie wyboru powoduje całkowite odświeżenie strony.
- Otwiera się w nowym oknie.