HEX Pixhawk 2.1 PX4 PIX 32-bitowy kontroler lotu Autopilot - The Cube Orange + zestaw standardowy z 3 płytkami nośnymi GPS i ADS-B
HEX Pixhawk 2.1 PX4 PIX 32-bitowy kontroler lotu Autopilot - The Cube Orange + zestaw standardowy z 3 płytkami nośnymi GPS i ADS-B
RCDrone
Nie można załadować gotowości do odbioru
SPECYFIKACJE
Rozstaw osi: Śruby
Zastosowanie: Pojazdy i zabawki zdalnie sterowane
Uaktualnij części/akcesoria: Ramię
Materiały narzędziowe: Klasa zmontowana
Parametry techniczne: Wartość 2
Rozmiar: 1
Urządzenia peryferyjne/urządzenia do zdalnego sterowania: Serwa
Zalecany wiek: 12+y
RC Części i akcesoria: Serwa
Ilość: 1 szt.
Pochodzenie: Chiny kontynentalne
Numer modelu: KOŚĆ SZEŚCIOKĄTNA+
Materiał: Metal
Atrybuty napędu na cztery koła: Zespół
Dla typu pojazdu: Samochody
Certyfikat: CE
Nazwa marki: Feetech
Uwaga: różnica pomiędzy Cube Orange i Cube Orange+ polega na tym, że Cube Orange można zaktualizować do oprogramowania sprzętowego PX4, podczas gdy Cube Orange+ nie obsługuje aktualizacji oprogramowania układowego PX4
Więcej informacji można znaleźć na oficjalnej stronie internetowej:https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview
Funkcje
- Obsługuje wiele trybów, takich jak włóczęga, utrzymywanie wysokości, tryb (z punktami trasy), tryb śledzenia itp.
- Obsługuje naziemne stacje kontroli misji i QGroundControl
- Wbudowany tryb lotu logowanie
- Transmisja danych lotu w czasie rzeczywistym
- Obsługuje unikanie obiektów w zakresie 360 stopni
- Wyposażony w wysokowydajny procesor H7
H7 ma podwójną- precyzyjny (DP) FPU, 1 MB pamięci RAM i procesor CPU 400 MHz zapewniają wysoką wydajność, niezwykle szybkie działanie i stabilne rozwiązanie w locie.
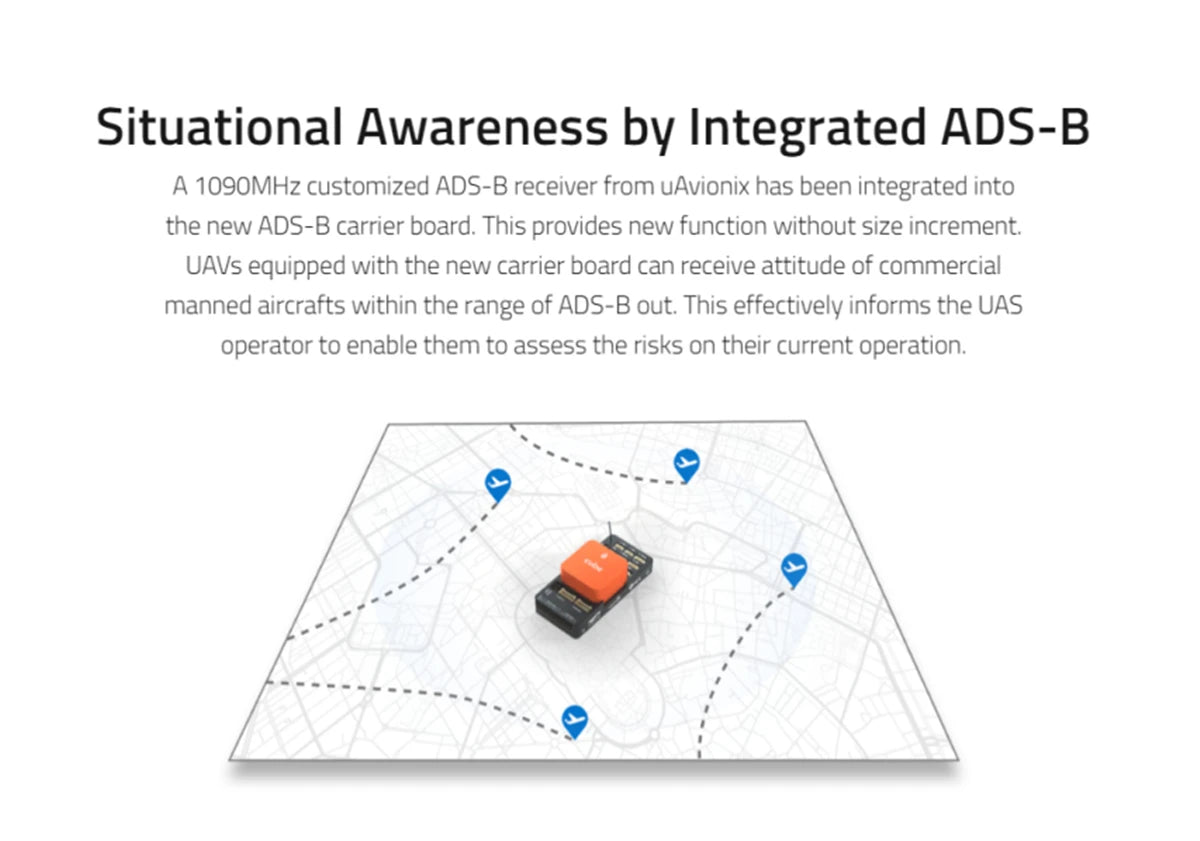
- Świadomość sytuacyjna dzięki zintegrowanemu ADS-B
A 1090 MHz dostosowane Odbiornik ADS-B firmy uAvionix został zintegrowany z nową płytką nośną ADS-B. Zapewnia to nową funkcję bez zwiększania rozmiaru. Bezzałogowe statki powietrzne wyposażone w nową płytę nośną mogą odbierać sygnały komercyjnych załogowych statków powietrznych w zasięgu ADS-B. To skutecznie informuje operatora UAS, aby umożliwić mu ocenę ryzyka w jego bieżącej pracy.
Łatwe przełączanie napięcia sygnału wyjściowego PWM
Wyjście PWM obsługuje przełączanie pomiędzy poziomami sygnału 3,3V i 5V. Przełączanie napięcia można wykonać za pomocą oprogramowania naziemnej stacji kontroli. Poprawia to kompatybilność z różnymi zewnętrznymi urządzeniami peryferyjnymi.
Obsługa wielu typów pojazdów: w tym helikoptera, multicoptera, stałopłata, VTOL, łazika, łodzi, łodzi podwodnej itp.
Szczegóły produktu
Główny procesor: STM32H757 (Nowy chip ma dobrą wydajność)
Koprocesor: STM32F1
Obsługiwane sygnały RC: PPM/SBUS/DSM
Redundancja zasilania: Potrójna redundancja
Czujniki: Potrójna System IMU
Szczegóły czujnika: ICM20649 (zintegrowany akcelerometr + żyroskop)
ICM20602 (zintegrowany akcelerometr + żyroskop)
ICM20948 (zintegrowany akcelerometr + żyroskop + magnetometr)
MS5611 x 2(Baro)
Oprogramowanie sprzętowe : Nieobsługiwane oprogramowanie kontrolera lotu PX4 typu open source
Obsługiwane typy pojazdów: Stałopłaty, helikoptery z 3-8 silnikami, helikoptery, samoloty VTOL, łaziki/łodzie/okręty podwodne
Waga: 73g
Materiał podwozia : Stop aluminium CNC (kostka) + Forma ABS (płyta nośna)
Rozmiar kostki: 38,4 x 38,4 x 22 mm
Płytka nośna: 94,5 x 44,3 x 17.3mm
Temperatura pracy: -10~+55° IMU z kontrolą temperatury
PWM I/O:14
Interfejs szeregowy Mavlink:2
Liczba obsługiwanych GPS:2
Interfejs debugowania:1
Interfejs I2C:1
Interfejs CAN:2
Tutaj3
GNSS: Tak
Kompas: Tak
Protokół: CAN
System operacyjny czasu rzeczywistego: Tak
Aktualizacja oprogramowania sprzętowego: Tak
RTK: Tak
Pyłoszczelna i wodoodporna: Tak
Typ odbiornika: moduły GNSS o wysokiej precyzji u-blox M8 (M8P)
Konstelacja satelity: GPS L1C/A, GLONASS L1OF, BeiDou B1I
Dokładność pozycjonowania: 3D FIX: 2,5 m / RTK: 0,025 m
Procesor: STM32F302
IMU snesor: ICM20948
Częstotliwość aktualizacji nawigacji: maks. 8 Hz
Protokół komunikacyjny: CAN
Temperatura pracy: -40°C do 85°C
Wymiary: 76mm x 76mm x 16,6 mm
Waga: 48,8 g





HEX Pixhawk 2.1 firmy PX4 to najbardziej zaawansowany na świecie autopilot do otwartych autonomicznych pojazdów bezzałogowych. Ten kontroler w kształcie sześcianu zawiera redundantne, izolowane i kontrolowane temperaturowo komponenty.
Płyta nośna zawiera dostosowany odbiornik ADS-B firmy uAvionix, działający na częstotliwości 1090 MHz, który umożliwia operatorom UAS ocenę potencjalnego ryzyka w ich bieżących operacjach.

Wyjście PWM obsługuje przełączanie między poziomami sygnału 3,3 V i 5 V, umożliwiając użycie oprogramowania naziemnej stacji kontroli do przełączania między tymi dwoma poziomami napięcia.
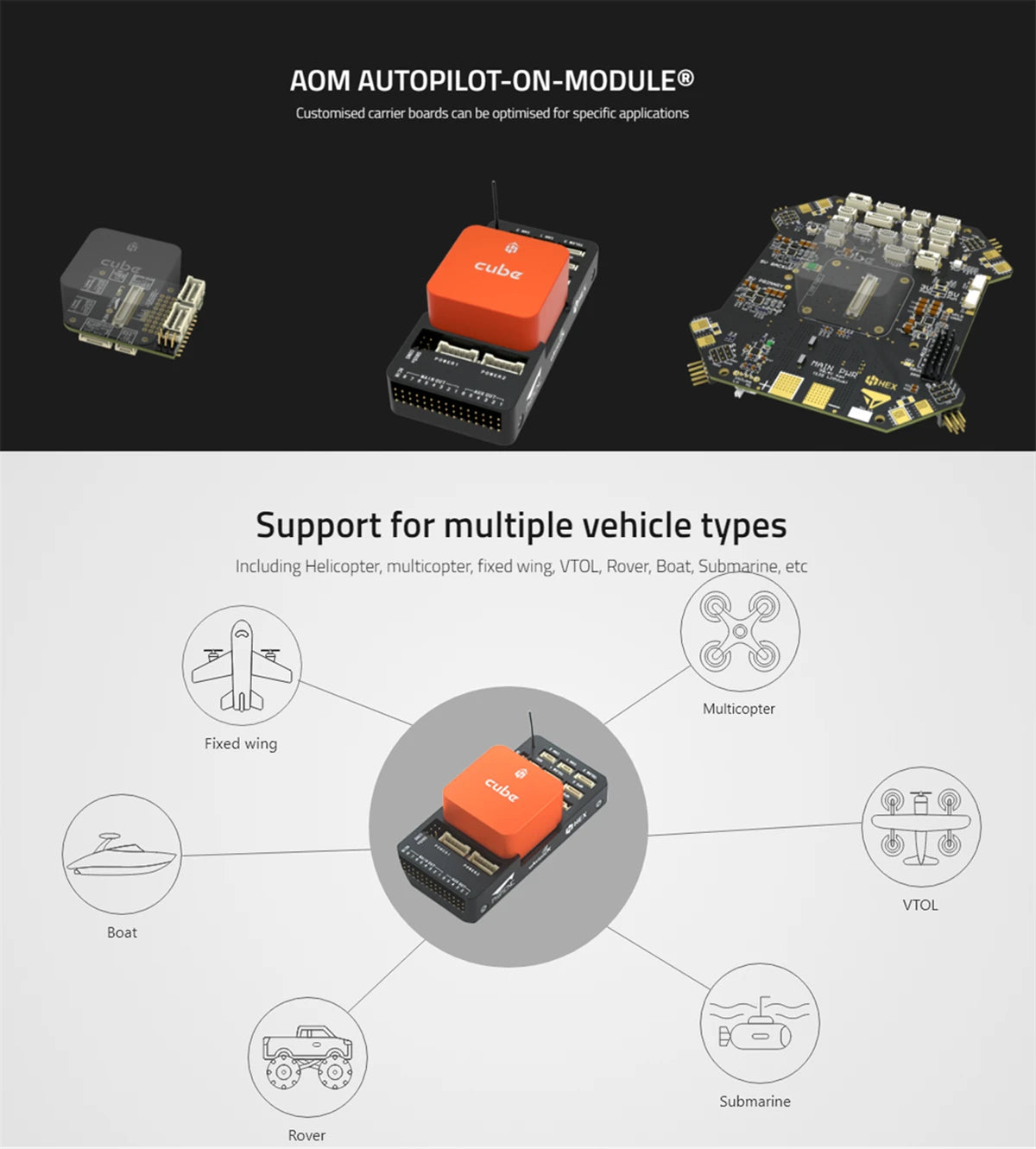
APM (Autopilot-on-Module) oferuje niestandardowe płyty nośne, które można zoptymalizować pod kątem konkretnych zastosowań, obsługując wiele typów pojazdów, w tym helikoptery, wielokoptery, stałopłaty, VTOL, łaziki, łodzie, łodzie podwodne i wiele innych.
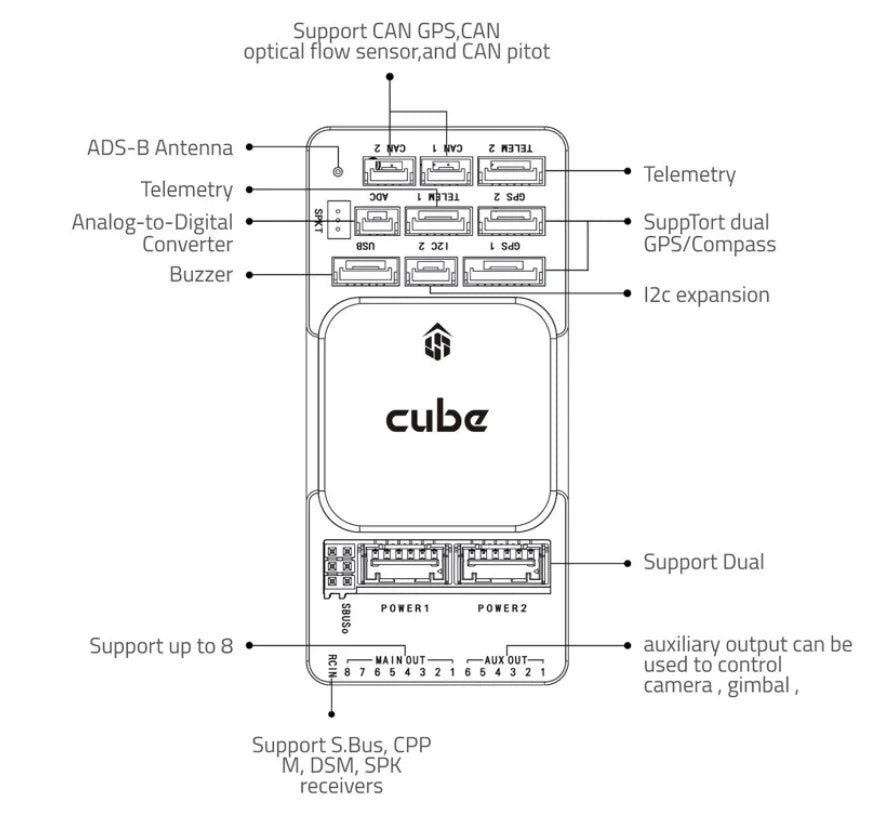
Ten kontroler lotu obsługuje różne urządzenia peryferyjne, w tym: * Magistrala CAN dla GPS, optycznego czujnika przepływu i danych Pitota * Antena ADS-B dla lepszej nawigacji * Funkcje telemetryczne z konwersją analogowo-cyfrową SD9 * Możliwości rozbudowy I2C dla dodatkowych czujników lub urządzeń * Opcje podwójnego zasilania zapewniające redundancję * Aż 8 wyjść pomocniczych, które można wykorzystać do sterowania różnymi urządzeniami, takimi jak: + 6 kamer lub gimbali poprzez protokół S-Bus

Ten kontroler lotu ma ulepszoną konstrukcję i jest wodoodporny, dzięki czemu nadaje się do stosowania w różnych środowiskach. Dodatkowo zawiera ekonomiczny, precyzyjny chip GNSS, który umożliwia precyzyjne pozycjonowanie (uwaga: do trybu kinematycznego w czasie rzeczywistym (RTK) wymagana jest stacja bazowa).
Related Collections