

WYSOKI MOMENT HTDW-4438-30-NE Silnik, przekładnia 30:1, 2Nm znamionowy, 45RPM, 12-48V, enkodery 14-bitowe
WYSOKI MOMENT HTDW-4438-30-NE Silnik, przekładnia 30:1, 2Nm znamionowy, 45RPM, 12-48V, enkodery 14-bitowe
HIGH TORQUE
Cena regularna
$306.00 USD
Cena regularna
Cena promocyjna
$306.00 USD
Cena jednostkowa
na
Z wliczonymi podatkami.
Koszt wysyłki obliczony przy realizacji zakupu.
Nie można załadować gotowości do odbioru
Przegląd
Silnik HIGH TORQUE HTDW-4438-30-NE to kompaktowy moduł silnika o wysokim momencie obrotowym z redukcją 30, zintegrowanym sprzężeniem zwrotnym enkodera (wejście 14-bitowe i wyjście 14-bitowe) oraz parametrami wydajności związanymi z kontrolą prędkości/pozycji, odpowiednimi do stawów robotycznych i modułów ruchu. W celu uzyskania wsparcia technicznego i pytań przed sprzedażą, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Aplikacje
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Kluczowe cechy
- Model: HTDW-4438-30-NE (WYSOKI MOMENT OBROTOWY)
- Stosunek redukcji: 30
- Sprzężenie zwrotne z podwójnym enkoderem: rozdzielczość enkodera wejściowego 14-bit i rozdzielczość enkodera wyjściowego 14-bit
- Prędkość komunikacji: 5 Mbps
- Częstotliwość sterowania: 3 kHz
Specyfikacje
| Długość i szerokość | 44mm |
| Wysokość | 40mm |
| Waga | 194g |
| Luzy | <10Arcmin |
| Dokładność powtarzalności pozycji | <12Arcmin |
| Dokładność absolutna pozycji | <15Arcmin |
| Stała momentu obrotowego | 0.039Nm/A |
| Liczba par biegunów | 14 |
| Stosunek redukcji | 30 |
| Moment obrotowy zablokowanego wirnika | 10Nm |
| Obroty na luzie | 75RPM |
| Moment znamionowy | 2Nm |
| Obroty znamionowe | 45RPM |
| Ocena | 6W |
| Zakres napięcia | 12-48V |
| Prąd szczytowy | 5A |
| Prąd znamionowy | 1A |
| Dokładność kontroli prędkości | ±10% |
| Dokładność kontroli | ±20% |
| Czas reakcji | ≤200us |
| Rozdzielczość enkodera wejściowego | 14-bit |
| Rozdzielczość enkodera wyjściowego | 14-bit |
| Prędkość Baud | 5Mbps |
| Częstotliwość sterowania | 3kHz |
Podręczniki & Dokumenty
- Podręcznik użytkownika asystenta debugowania silnika o WYSOKIM MOMENCIE (PDF)
- Podręcznik debugowania (PDF)
- 1.2 analiza protokołu fdcan (PDF)
- Instrukcja obsługi (PDF)
- Rysunek instalacyjny (PDF)
- Model 3D HTDW-4438-30-NE (STEP)
Szczegóły

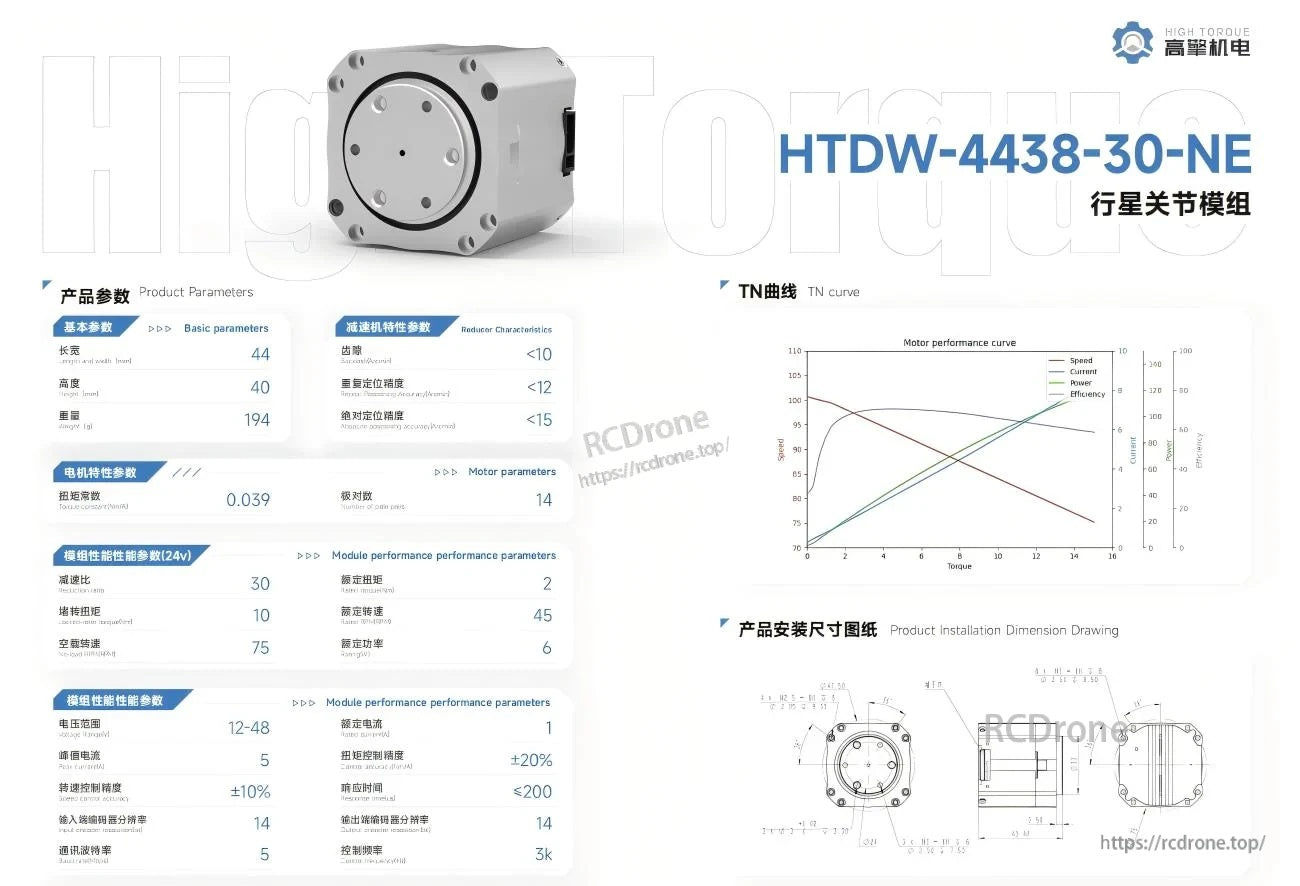
Kluczowe parametry i wymiary instalacyjne dla HTDW-4438-30-NE są podsumowane w celu szybkiego planowania integracji.

