


WYSOKI MOMENT HTDW-5047 Moduł silnika o wysokim momencie 50mm 12-48V Enkoder 14-bitowy Przełożenie 9/20/36
WYSOKI MOMENT HTDW-5047 Moduł silnika o wysokim momencie 50mm 12-48V Enkoder 14-bitowy Przełożenie 9/20/36
HIGH TORQUE
Nie można załadować gotowości do odbioru
Przegląd
Silnik HIGH TORQUE HTDW-5047 to kompaktowy moduł silnika o wysokim momencie obrotowym, oferowany w trzech stosunkach redukcji (9 / 20 / 36). Posiada rozdzielczość enkodera wejścia/wyjścia 14-bit, zakres napięcia 12-48V oraz częstotliwość sterowania 3kHz do kontroli ruchu i stawów robotycznych.
Kluczowe cechy
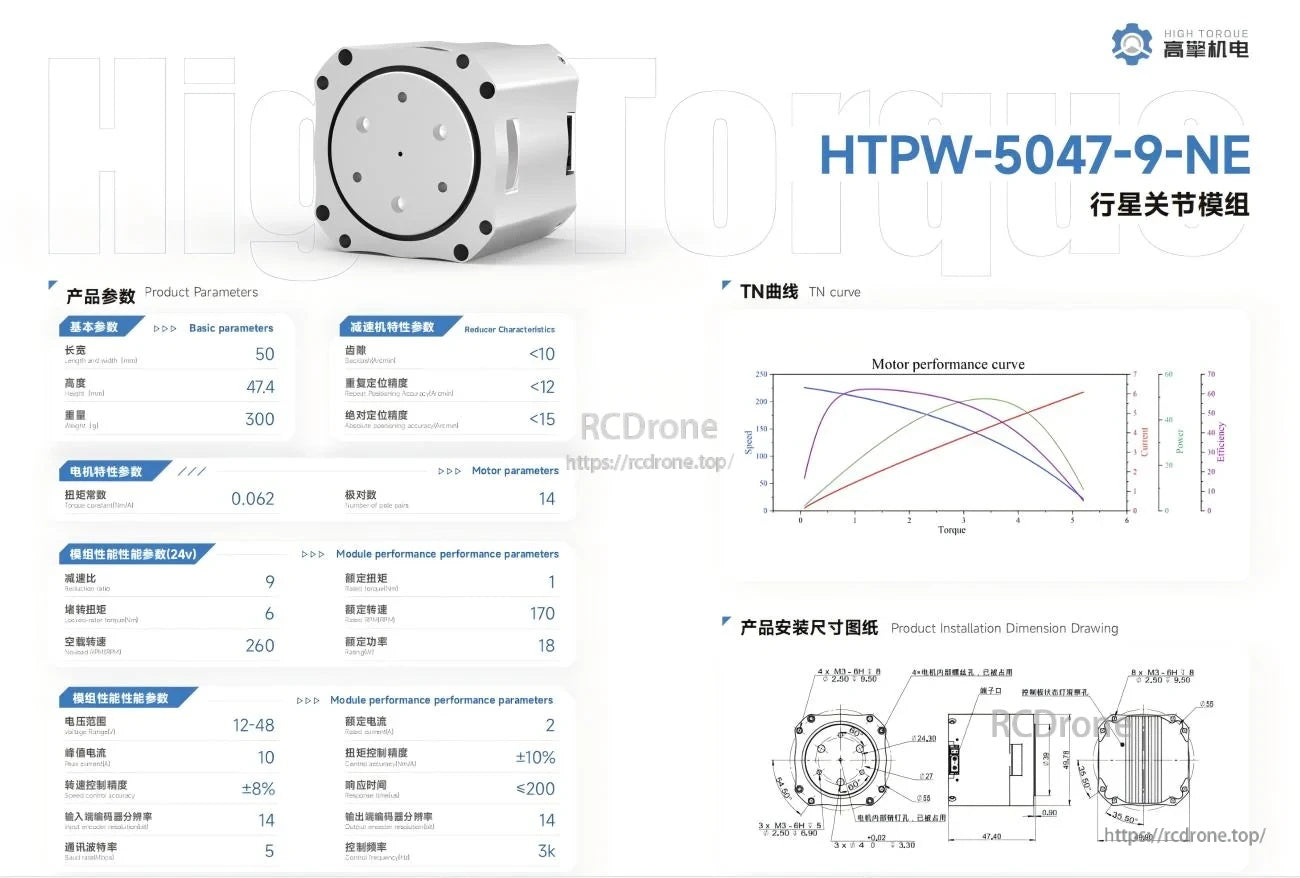
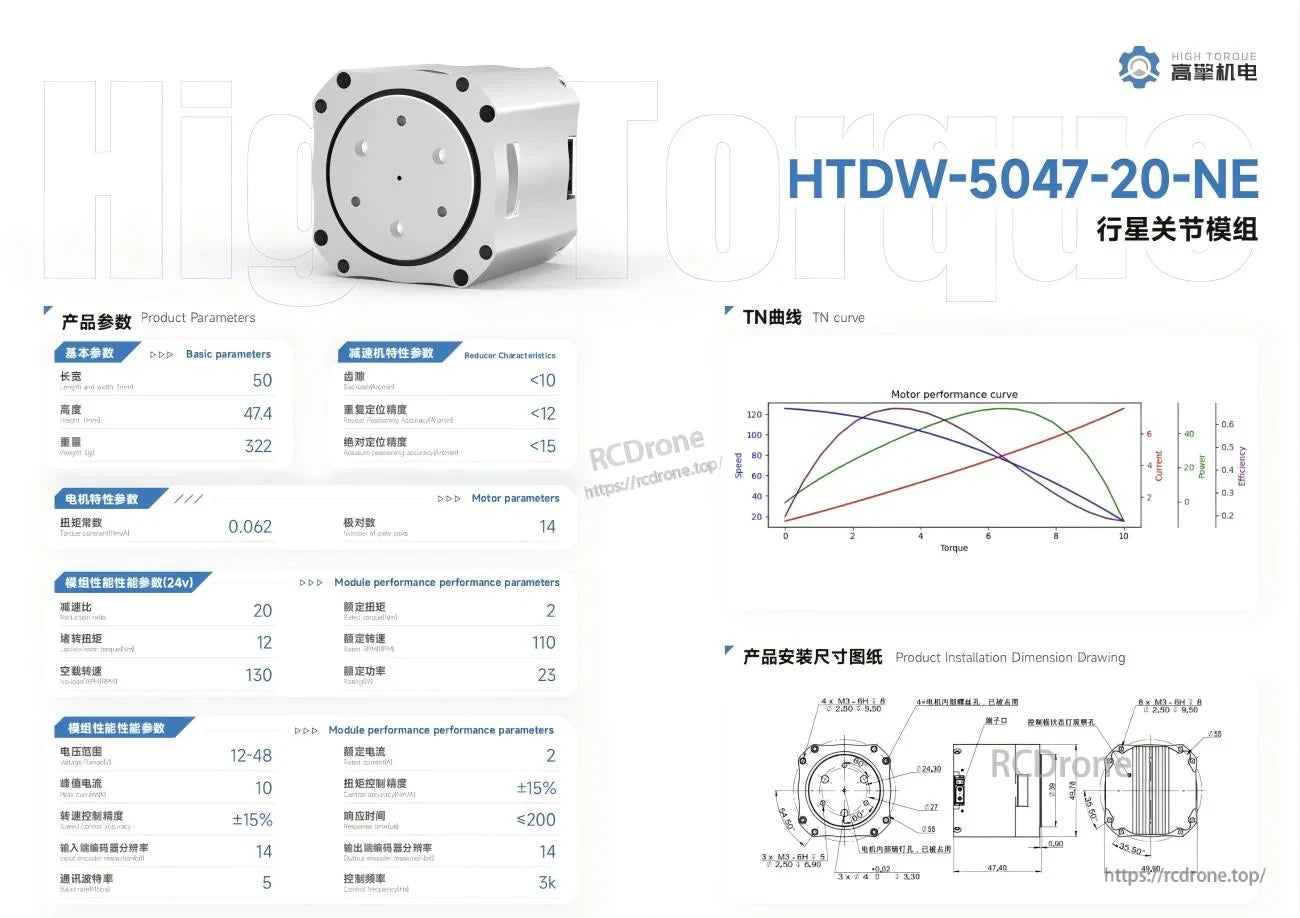
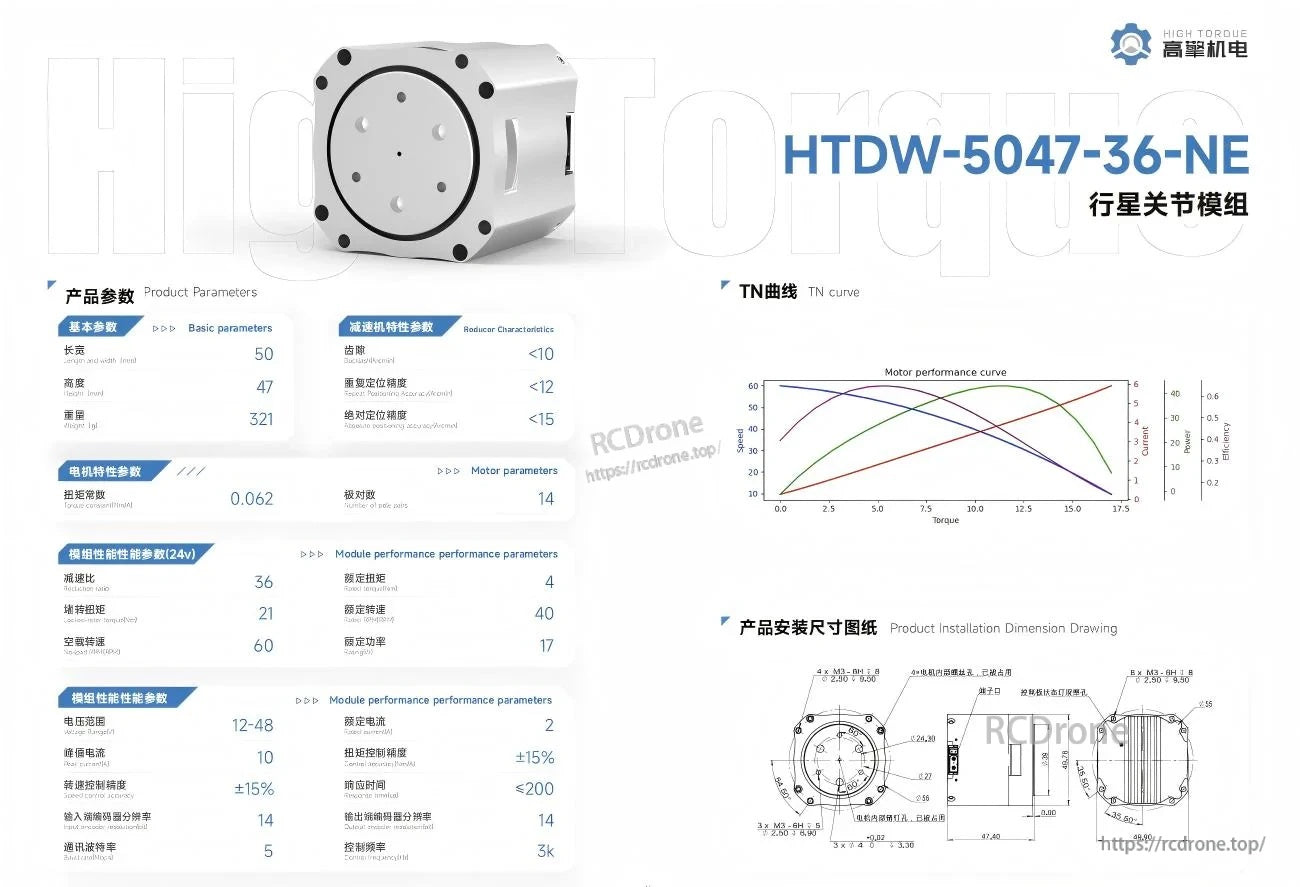
- Modele: HTDW-5047-9-NE / HTDW-5047-20-NE / HTDW-5047-36-NE
- Niskie luz: <10 Arcmin
- Dokładność powtarzalności pozycjonowania: <12 Arcmin; dokładność pozycjonowania absolutnego: <15 Arcmin
- Rozdzielczość enkodera: 14-bit (wejście) i 14-bit (wyjście)
- Prędkość transmisji: 5 Mbps; czas reakcji: ≤200 us
Specyfikacje
| Parametr | HTDW-5047-9-NE | HTDW-5047-20-NE | HTDW-5047-36-NE |
|---|---|---|---|
| Długość i szerokość | 50mm | 50mm | 50mm |
| Wysokość | 47.4mm | 47.4mm | 47mm |
| Waga | 300g | 322g | 321g |
| Luzy | <10 Arcmin | <10 Arcmin | <10 Arcmin |
| Dokładność powtarzalności pozycjonowania | <12 Arcmin | <12 Arcmin | <12 Arcmin |
| Dokładność pozycjonowania absolutnego | <15 Arcmin | <15 Arcmin | <15 Arcmin |
| Stała momentu | 0.062 Nm/A | 0.062 Nm/A | 0.062 Nm/A |
| Liczba par biegunów | 14 | 14 | 14 |
| Przełożenie | 9 | 20 | 36 |
| Moment blokady | 6 Nm | 12 Nm | 21 Nm |
| Obroty na luzie | 260 RPM | 130 RPM | 60 RPM |
| Moment znamionowy | 1 Nm | 2 Nm | 4 Nm |
| Obroty znamionowe | 170 RPM | 110 RPM | 40 RPM |
| Ocena | 18 W | 23 W | 17 W |
| Zakres napięcia | 12-48V | 12-48V | 12-48V |
| Prąd szczytowy | 10 A | 10 A | 10 A |
| Dokładność kontroli prędkości | ±8% | ±15% | ±15% |
| Rozdzielczość enkodera wejściowego | 14-bit | 14-bit | 14-bit |
| Prędkość baud | 5 Mbps | 5 Mbps | 5 Mbps |
| Prąd znamionowy | 2 A | 2 A | 2 A |
| Dokładność sterowania | ±10% | ±15% | ±15% |
| Czas reakcji | ≤200 us | ≤200 us | ≤200 us |
| Rozdzielczość enkodera wyjściowego | 14-bit | 14-bit | 14-bit |
| Frekencja sterowania | 3 kHz | 3 kHz | 3 kHz |
Aby uzyskać wskazówki dotyczące wyboru i wsparcia posprzedażowego, skontaktuj się [email protected] or odwiedź https://rcdrone.top/.
Aplikacje
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Podręczniki
- HTDW-5047-9-NE WYSOKOMOMENTOWY Asystent Debugowania Silnika Podręcznik użytkownika (PDF)
- HTDW-5047-20-NE WYSOKOMOMENTOWY Asystent Debugowania Silnika Podręcznik użytkownika (PDF)
- HTDW-5047-36-NE WYSOKOMOMENTOWY Asystent Debugowania Silnika Podręcznik użytkownika (PDF)
- HTDW-5047-9-NE Podręcznik Debugowania (PDF)
- HTDW-5047-20-NE Podręcznik Debugowania (PDF)
- HTDW-5047-36-NE Podręcznik Debugowania (PDF)
- HTDW-5047-9-NE 1.2 analiza protokołu fdcan (PDF)
- HTDW-5047-20-NE 1.2 analiza protokołu fdcan (PDF)
- HTDW-5047-36-NE 1.2 analiza protokołu fdcan (PDF)
- Model 3D silnika HTDW-5047-9-NE (STP, ZIP)
- Model 3D silnika HTDW-5047-20-NE (STP, ZIP)
- Model 3D silnika HTDW-5047-36-NE (STP, ZIP)
- Podręcznik użytkownika HTDW-5047 (PDF)
Szczegóły

Seria HTDW-5047 łączy kompaktowy format 50 mm z wysokim momentem obrotowym dla stawów robotycznych i kontroli ruchu.
Wybierz wersję z redukcją 9:1, gdy priorytetem jest wyższa prędkość przy zachowaniu tego samego rozmiaru modułu.
Opcja redukcji 20:1 równoważy prędkość i moment obrotowy dla ogólnych stawów robotycznych i siłowników.
Wariant redukcji 36:1 nadaje się do stawów o niskiej prędkości i wyższym momencie obrotowym, gdzie precyzyjne pozycjonowanie jest kluczowe.
Related Collections


