

WYSOKI MOMENT HTDW-6056-36-NE-JC Silnik (wersja z krzyżowymi łożyskami), przełożenie 36, moment znamionowy 10Nm, 12-48V
WYSOKI MOMENT HTDW-6056-36-NE-JC Silnik (wersja z krzyżowymi łożyskami), przełożenie 36, moment znamionowy 10Nm, 12-48V
HIGH TORQUE
Cena regularna
$362.00 USD
Cena regularna
Cena promocyjna
$362.00 USD
Cena jednostkowa
na
Z wliczonymi podatkami.
Koszt wysyłki obliczony przy realizacji zakupu.
Nie można załadować gotowości do odbioru
Przegląd
Silnik HIGH TORQUE HTDW-6056-36-NE-JC to moduł silnika o wysokim momencie obrotowym, charakteryzujący się współczynnikiem redukcji 36 oraz strukturą z krzyżowymi rolkami. Jest przeznaczony do pracy w zakresie 12-48V z rozdzielczością enkodera wejścia/wyjścia 14-bit i zaprojektowany do precyzyjnego działania przy niskich prędkościach oraz wysokim momencie obrotowym.
Kluczowe cechy
- Model: HTDW-6056-36-NE-JC (również oznaczony jako HTDW-6056-36-JC na grafice produktu)
- Wersja z krzyżowymi rolkami
- Niski luz: <10Arcmin
- Rozdzielczość enkodera: 14-bit (wejście), 14-bit (wyjście)
- Częstotliwość sterowania: 3kHz
- Szybki czas reakcji: ≤200us
Specyfikacje
| Długość i szerokość | 60mm |
| Wysokość | 56mm |
| Waga | 570g |
| Luz | <10Arcmin |
| Dokładność powtarzalności położenia | <12Arcmin |
| Dokładność położenia absolutnego | <15Arcmin |
| Stała momentu | / |
| Liczba par biegunów | 14 |
| Stosunek redukcji | 36 |
| Moment obrotowy z zablokowanym wirnikiem | 36Nm |
| Obroty na luzie | 60RPM |
| Moment obrotowy nominalny | 10Nm |
| Obroty nominalne | 50RPM |
| Ocena | 52W |
| Zakres napięcia | 12-48V |
| Prąd szczytowy | 10A |
| Dokładność kontroli prędkości | ±10% |
| Rozdzielczość enkodera wejściowego | 14-bit |
| Prędkość transmisji | 5Mbps |
| Prąd nominalny | 3A |
| Dokładność kontroli | ±20% |
| Czas reakcji | ≤200us |
| Rozdzielczość enkodera wyjściowego | 14-bit |
| Częstotliwość kontroli | 3kHz |
Aplikacje
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
W celu uzyskania wsparcia w zakresie integracji oraz pytań przed sprzedażą, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Instrukcje & Pobrania
- Podręcznik użytkownika asystenta debugowania silnika o wysokim momencie obrotowym (PDF)
- Podręcznik debugowania (PDF)
- Analiza protokołu 1.2 fdcan (PDF)
- Podręcznik użytkownika (PDF)
- Model 3D HTDW-6056-36-NE-JC (STP w ZIP)
Szczegóły

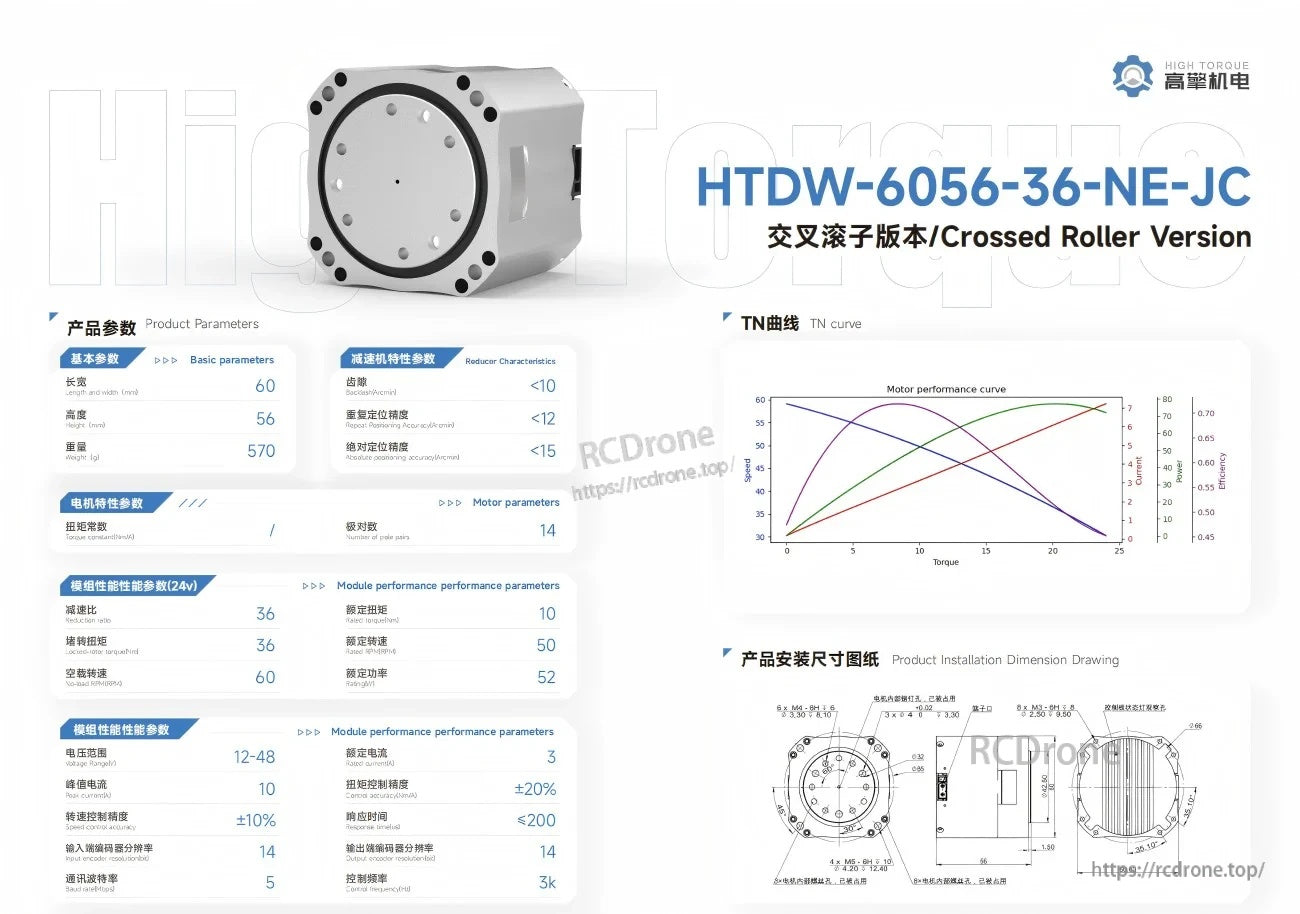
Szczegółowe parametry i wymiary montażowe dla wersji z krzyżowymi rolkami pomagają potwierdzić dopasowanie i wydajność przed integracją.
Related Collections

