Moduł GPS Holybro DroneCAN M8N - procesor STM32G4 BMM150 Kompas 3GNSS Obsługa protokołu DroneCAN
Moduł GPS Holybro DroneCAN M8N - procesor STM32G4 BMM150 Kompas 3GNSS Obsługa protokołu DroneCAN
HolyBro
Nie można załadować gotowości do odbioru
Opis
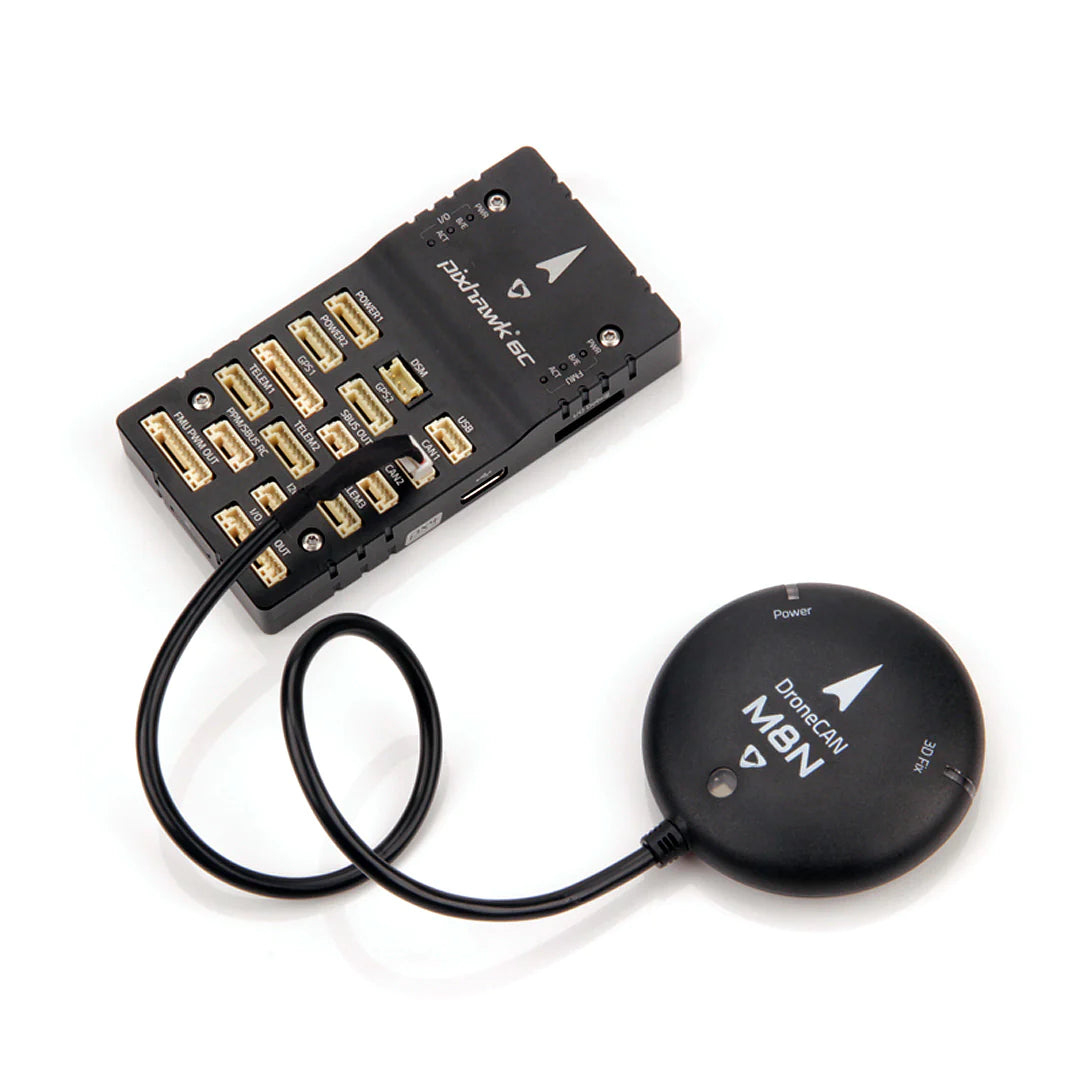
Holybro DroneCAN GPS posiada moduł UBLOX M8N lub M9N, kompas BMM150, trójkolorowy wskaźnik LED. Posiada procesor STM32G4 i przyjął protokół DroneCAN do komunikacji, dzięki czemu jest bardziej niezawodny i lepiej radzi sobie z zakłóceniami elektromagnetycznymi w porównaniu z połączeniem szeregowym. Nie zajmuje żadnego portu szeregowego kontrolera lotu, a różne urządzenia CAN można podłączyć do tej samej magistrali CAN za pośrednictwem rozdzielacza CAN.
Specyfikacja:
| DroneCAN M8N | |
| Odbiornik GNSS | Ublox NEO M8N |
| Liczba jednoczesnych GNSS | Do 3 GNSS (GPS, Galileo, GLONASS, BeiDou) |
| Procesor | STM32G4 (170 MHz, 512 tys. FLASH) |
| Kompas | BMM150 |
| Pasmo częstotliwości | GPS: L1C/A GLONASS: L10F Beidou: B1I Galileo: E1B/C |
| System wspomagania GNSS | SBAS: WAAS, EGNOS, MSAS, QZSS |
| Aktualizacja nawigacji | 5 Hz Domyślnie (maks. 10 Hz) |
| Dokładność | 2,5 m |
| Dokładność prędkości | 0,05 m/s |
| Maksymalna liczba satelitów | 22+ |
| Protokół komunikacyjny | DroneCAN @ 1 Mbit/s |
| Obsługuje autopilota FW | PX4, Ardupilot |
| Typ portu | GHR-04V-S |
| Antena | Antena ceramiczna 25 x 25 x 4 mm |
| Zużycie energii | Mniej niż 200 mA przy 5 V |
| Napięcie | 4,7-5,2V |
| Temperatura robocza | -40~80C |
| Rozmiar | Średnica: 54 mm Grubość: 14,5 mm |
| Waga | 36g |
| Długość kabla | 26cm |
| Inne uwagi | - Wzmacniacz RF LNA MAX2659ELT+ - Pojemność akumulatora Faraha - Niskoszumowy regulator 3,3 V |
Inne informacje techniczne można znaleźć na stronie https://docs.holybro.com/
DronCAN
DroneCAN to podstawowy protokół CAN używany w projektach ArduPilot i PX4 do komunikacji z urządzeniami peryferyjnymi CAN. Jest to otwarty protokół z otwartą komunikacją, specyfikacją i wieloma otwartymi implementacjami.
Rozwój DroneCAN
Projekt DroneCAN ma aktywną społeczność programistów.
- dyskusje na discordzie w https://dronecan.org/discord
- rozwój na githubie w https://github.com/DroneCAN
Related Collections