





Kontroler lotu Holybro Pix32 v6 - oparty na module STM32H743 FC Zestaw standardowy Mini zestaw z GPS M8N/M9N/M10
Kontroler lotu Holybro Pix32 v6 - oparty na module STM32H743 FC Zestaw standardowy Mini zestaw z GPS M8N/M9N/M10
HolyBro
Nie można załadować gotowości do odbioru
Pix32 v6 to najnowsza aktualizacja kontrolerów lotu pix32 v5. Jest to odmiana Pixhawka 6C. Składa się z oddzielnego kontrolera lotu i płytki nośnej, które są połączone 100-pinowym złączem. Jest przeznaczony dla pilotów, którzy potrzebują elastycznego i konfigurowalnego systemu sterowania lotem o dużej mocy.
W Pix32 v6 znajduje się moduł STM32H743 oparty na technologii STMicroelectronics®, w połączeniu z technologią czujników firmy Bosch® i InvenSense®, zapewniający elastyczność i niezawodność w sterowaniu dowolnym pojazdem autonomicznym, odpowiednim zarówno do zastosowań akademickich, jak i komercyjnych.
Mikrokontroler H7 Pix32 v6 zawiera rdzeń Arm® Cortex®-M7 pracujący do 480 MHz, posiada 2MB pamięci flash i 1MB RAM. Dzięki zaktualizowanej mocy obliczeniowej programiści mogą pracować bardziej produktywnie i wydajnie, umożliwiając tworzenie złożonych algorytmów i modeli. Zawiera wysokowydajne, ciche moduły IMU na pokładzie, zaprojektowane tak, aby były opłacalne, a jednocześnie zapewniały redundancję IMU. System izolacji wibracji filtrujący wibracje o wysokiej częstotliwości i redukujący hałas, aby zapewnić dokładne odczyty, umożliwiając pojazdom osiągnięcie lepszych ogólnych osiągów w locie.
Ten kontroler lotu jest idealny dla osób poszukujących niedrogiego i modułowego lotu kontroler, który może korzystać z dostosowanej listwy przypodłogowej. Udostępniliśmy publicznie schematy płyty bazowej pix32 v6. Możesz albo samodzielnie wykonać niestandardową płytkę nośną, albo po prostu pozwolić nam sobie w tym pomóc. Korzystając z niestandardowej listwy przypodłogowej, możesz mieć pewność, że rozmiar fizyczny, układ pinów i wymagania dotyczące dystrybucji zasilania idealnie odpowiadają Twojemu pojazdowi, zapewniając wszystkie potrzebne złącza i pozbawione kosztownych i dużych złączy, których nie potrzebujesz.
Kluczowe punkty projektowe:
- Wysokowydajny procesor STM32H743 z większą mocą obliczeniową i pamięcią RAM
- Nowa, ekonomiczna konstrukcja o niskim profilu
- Nowo zaprojektowany zintegrowany system izolacji drgań filtrujący wibracje o wysokiej częstotliwości i redukujący hałas, aby zapewnić dokładne odczyty
- IMU są kontrolowane temperaturowo za pomocą wbudowanych rezystorów grzejnych, co pozwala na optymalną temperaturę roboczą IMU
Uwaga:
- Tabela porównawcza modułów mocy
- M10 GPS Wymaga PX4 1.14, wymagany jest ArduPilot 4.3 lub nowszy. (Od 7 września 2023 r. PX4 wypuściło wersję 1.14 RC1 (kandydat do wydania). Aby uzyskać szczegółowe informacje na temat najnowszej wersji, kliknij ten link. Więcej informacji na temat flashowania wersji RC można znaleźć tutaj.)
Z łatwością zaprojektuj własną niestandardową listwę przypodłogową, korzystając z dostarczonego pliku projektu referencyjnego.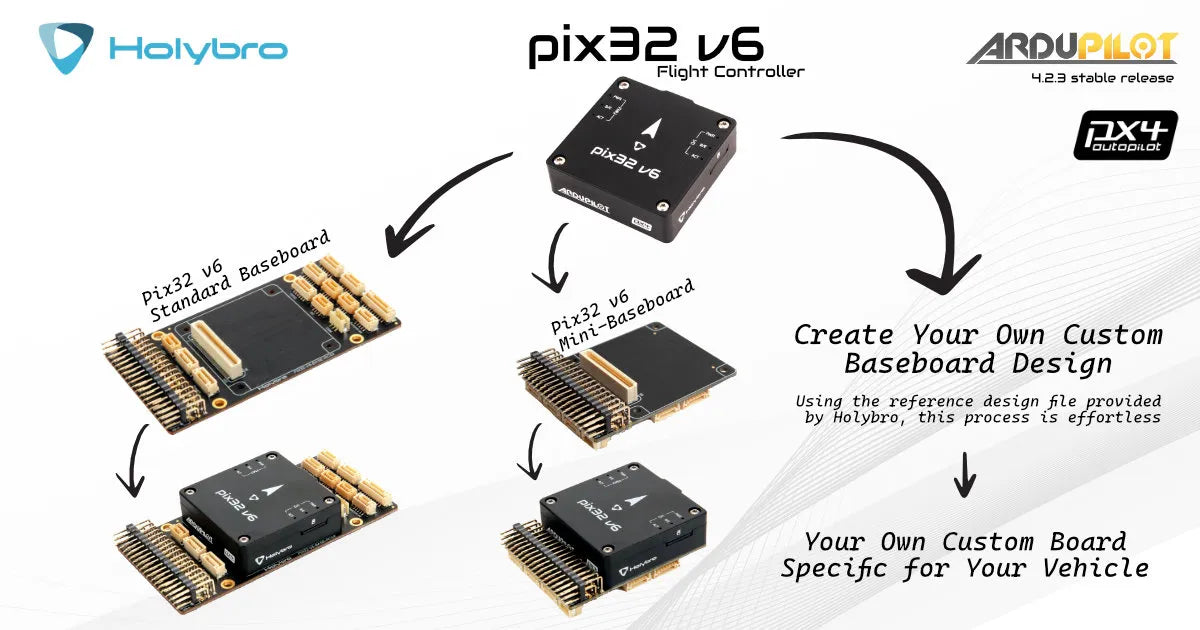
SKU20190/20192 Zawiera:
- Moduł kontrolera lotu Pix32 v6
- Standardowa listwa przypodłogowa / Minilistwa
- Moduł zasilania PM02 V3 12S
- Standardowy zestaw kabli
SKU20191/SKU20193 Obejmuje:
- Moduł kontrolera lotu Pix32 v6
- Standardowa listwa przypodłogowa / Minilistwa
- Moduł zasilania PM02 V3 12S
- Mini zestaw kabli
- M8N GPS / M9N GPS / M10 GPS
Uwaga: Zestaw standardowy Pix32v6 będzie dostarczany z listwą przypodłogową Pix32v5 do odwołania. Dodatkowe informacje na temat listwy przypodłogowej można znaleźć tutaj.
Related Collections












