Kontroler lotu Holybro Pixhawk 4 z autopilotem
Kontroler lotu Holybro Pixhawk 4 z autopilotem
HolyBro
Nie można załadować gotowości do odbioru
Pixhawk® 4 wykorzystuje zaawansowaną technologię procesorową firmy STMicroelectronics®, technologię czujników firmy Bosch®, InvenSense® oraz system operacyjny czasu rzeczywistego NuttX, zapewniając niesamowitą wydajność, elastyczność i niezawodność sterowania dowolnym pojazdem autonomicznym.
Mikrokontroler Pixhawk 4 ma 2 MB pamięci flash i 512 KB pamięci RAM. Dzięki zwiększonej mocy i zasobom pamięci RAM programiści mogą być bardziej produktywni i wydajni w swojej pracy rozwojowej. Bardziej złożone algorytmy i modele można zaimplementować na autopilocie.
Wysokowydajne, niskoszumowe IMU na pokładzie są przeznaczone do zastosowań stabilizacyjnych. Sygnały gotowe do odczytu danych ze wszystkich czujników są kierowane do oddzielnych pinów przerwania i przechwytywania timera na autopilocie, umożliwiając precyzyjne znakowanie czasowe danych czujników. Nowo zaprojektowane izolatory drgań umożliwiają dokładniejsze odczyty, umożliwiając pojazdom osiągnięcie lepszych ogólnych osiągów lotu.
Dwie zewnętrzne magistrale SPI i sześć powiązanych linii chip select umożliwiają dodanie dodatkowych czujników i ładunku z interfejsem SPI. Łącznie są cztery magistrale I2C, dwie dedykowane do użytku zewnętrznego i dwie zgrupowane z portami szeregowymi dla modułów GPS/Compass.
Notatka:
- Wymagania GPS M10 PX4 1.14 i ArduPilot 4.3 lub nowszy.
- Tabela porównawcza modułów zasilania
Dane techniczne
- Główny procesor FMU
- STM32F765 - 32-bitowy Arm ® Cortex® -M7, 216MHz, pamięć 2MB, 512KB RAM
- STM32F765 - 32-bitowy Arm ® Cortex® -M7, 216MHz, pamięć 2MB, 512KB RAM
- Procesor IO
- STM32F103 - 32-bitowy Arm® Cortex®-M3, 72MHz, 64KB SRAM (aktualny)
- STM32F100 - 32-bitowy Arm ® Cortex® -M3, 24MHz, 8KB SRAM (wycofany ze sprzedaży)
- Czujniki pokładowe
- Akcelerator/żyroskop: ICM-20689
- Akcelerator/żyroskop: BMI055/ICM-20602
- Mag: IST8310
- Barometr: MS5611
- Akcelerator/żyroskop: ICM-20689
Dane elektryczne
- Wyjście modułu zasilania: 4,9~5,5 V
- Maksymalne napięcie wejściowe: 6V
- Maksymalny prąd wykrywania: 120A
- Wejście zasilania USB: 4,75~5,25 V
- Wejście szyny serwa: 0~36V
- Temperatura pracy: -25-85°C
Dane mechaniczne
- Wymiary: 44x84x12mm
- Waga (obudowa plastikowa): 33.3g
- Waga (obudowa aluminiowa): 49g
Pobieranie:
Numer katalogowy 11032/11035 Zawiera:
- Kontroler lotu Pixhawk 4 (plastikowy lub aluminiowy)
- Zestaw kabli
SKU 20045/20046/20114/20115 Zawiera:
- Kontroler lotu Pixhawk 4(Plastik lub Aluminium)
- Moduł zasilania: PM02 Wersja 3 12S/PM07 14S
- Zestaw kabli
SKU 20139/20140/20141/20142/20269/20270/20271/20272 Zawiera:
- Kontroler lotu Pixhawk 4
- Moduł zasilania: PM02 Wersja 3 12S/PM07 14S
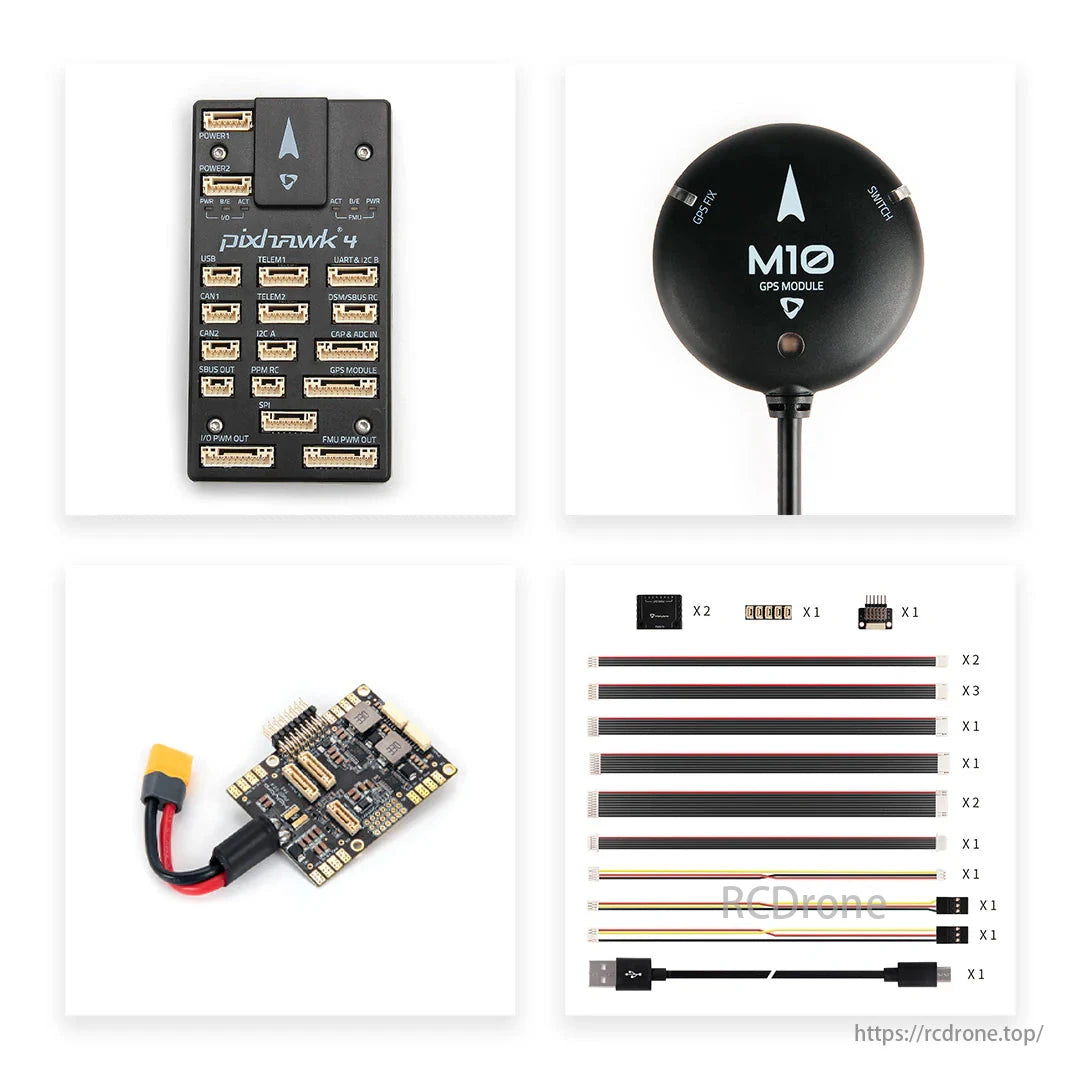
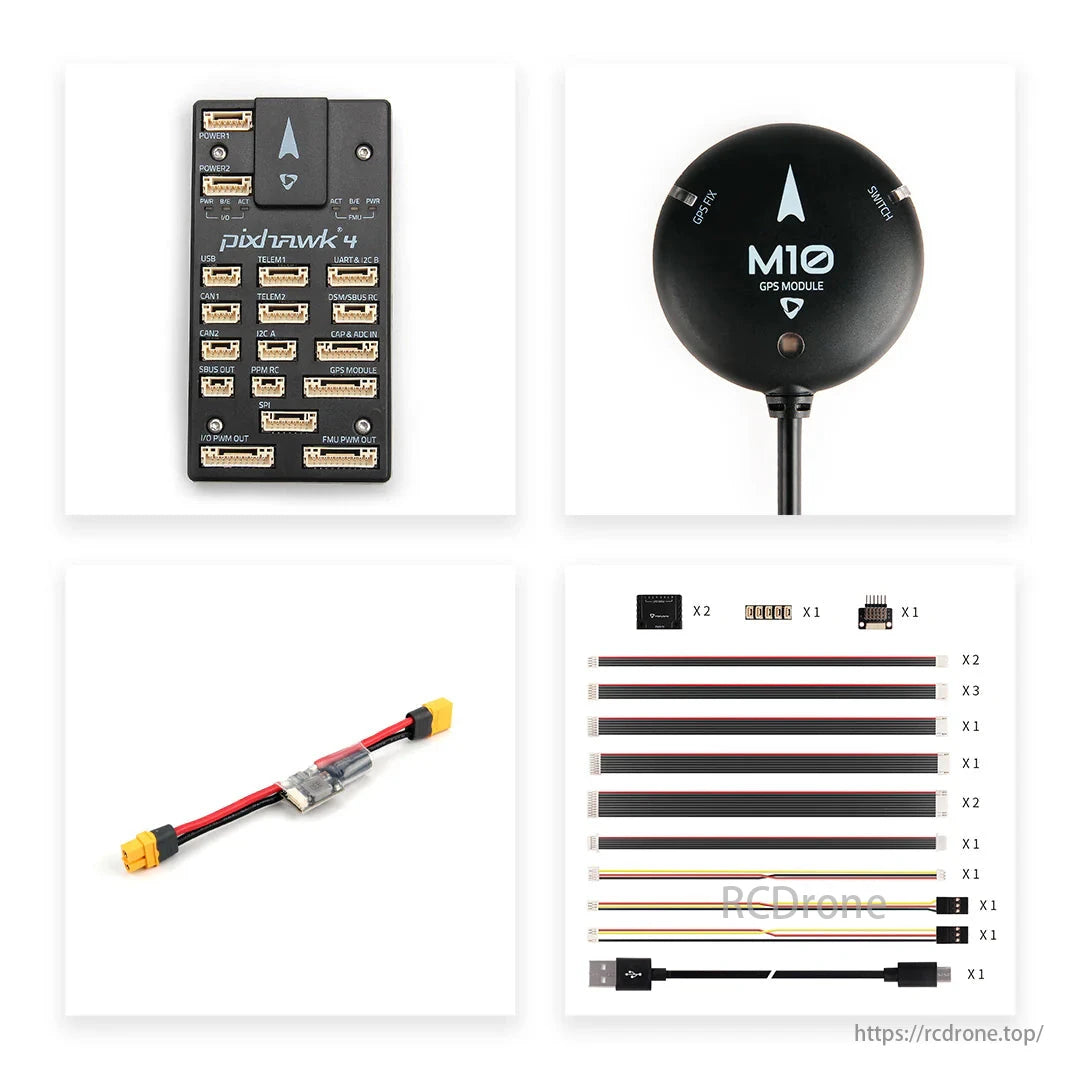
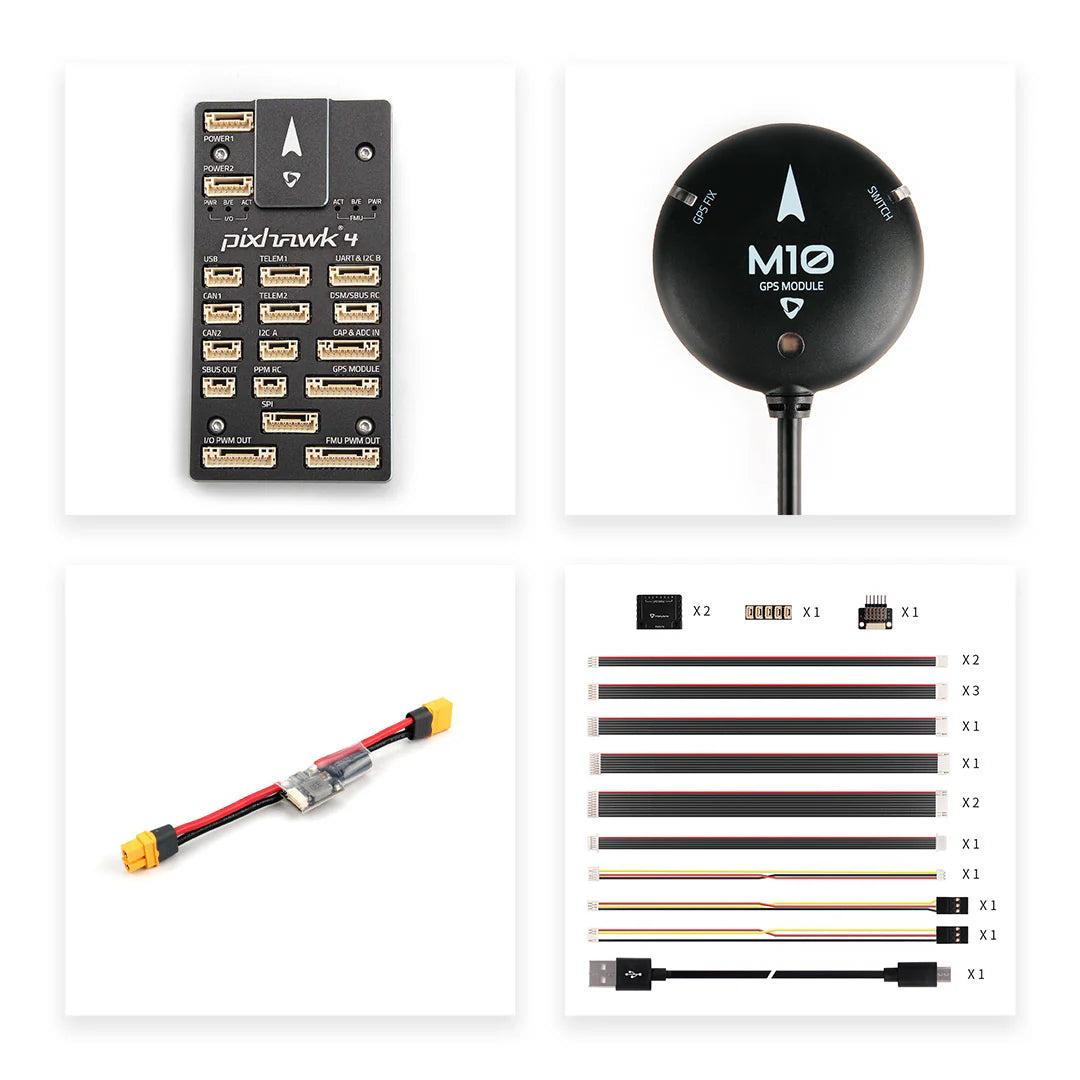
- GPS: M9N/M10
- Zestaw kabli

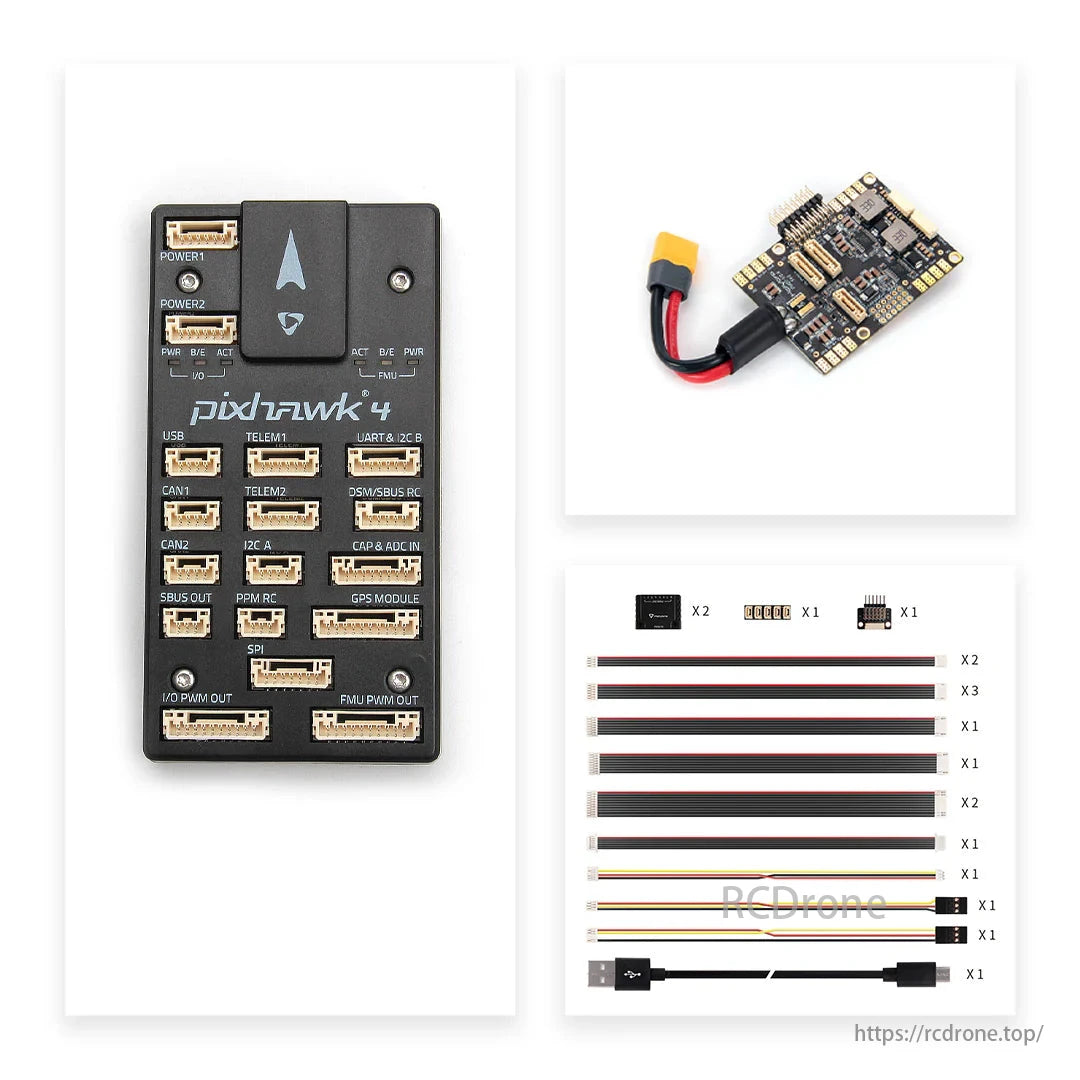
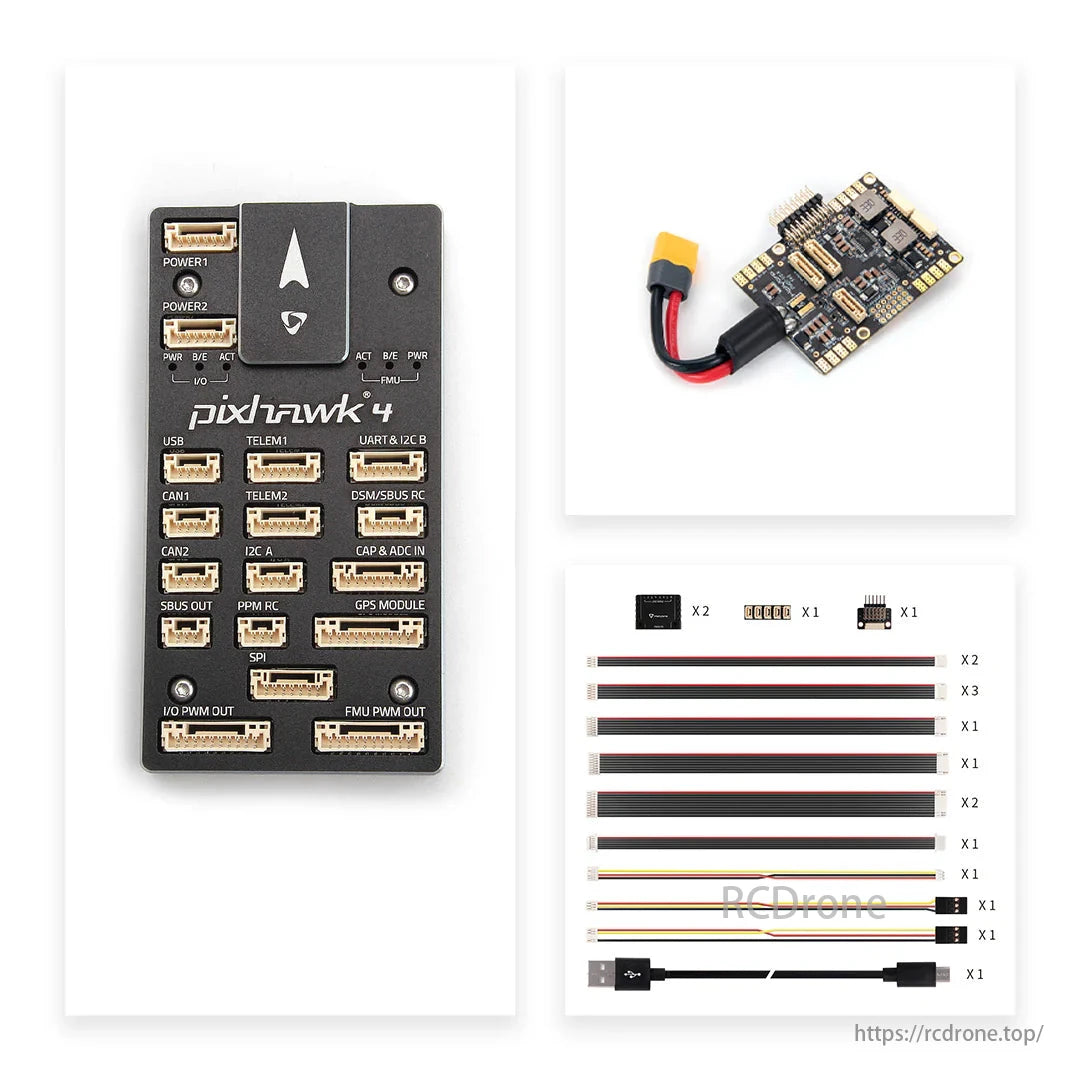
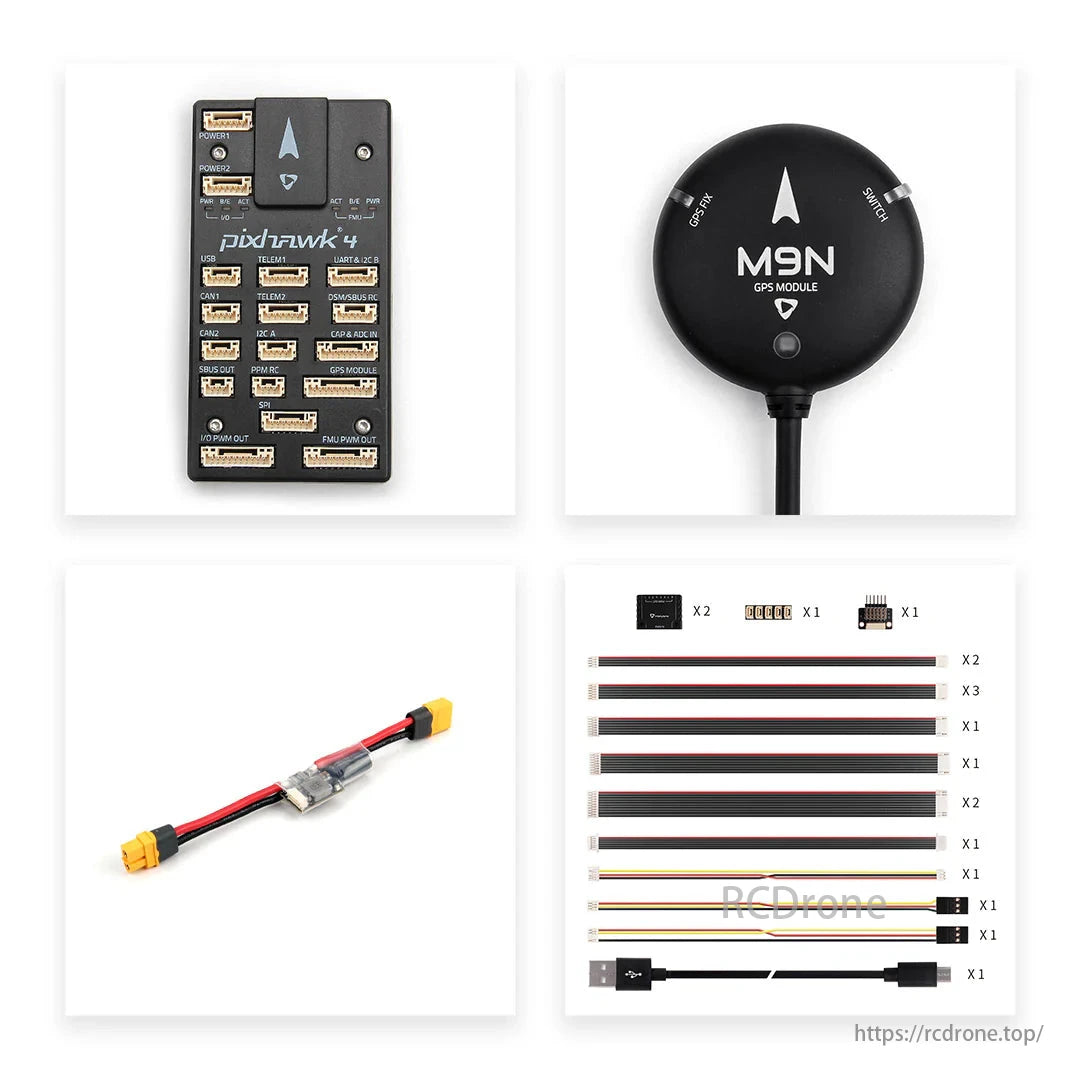
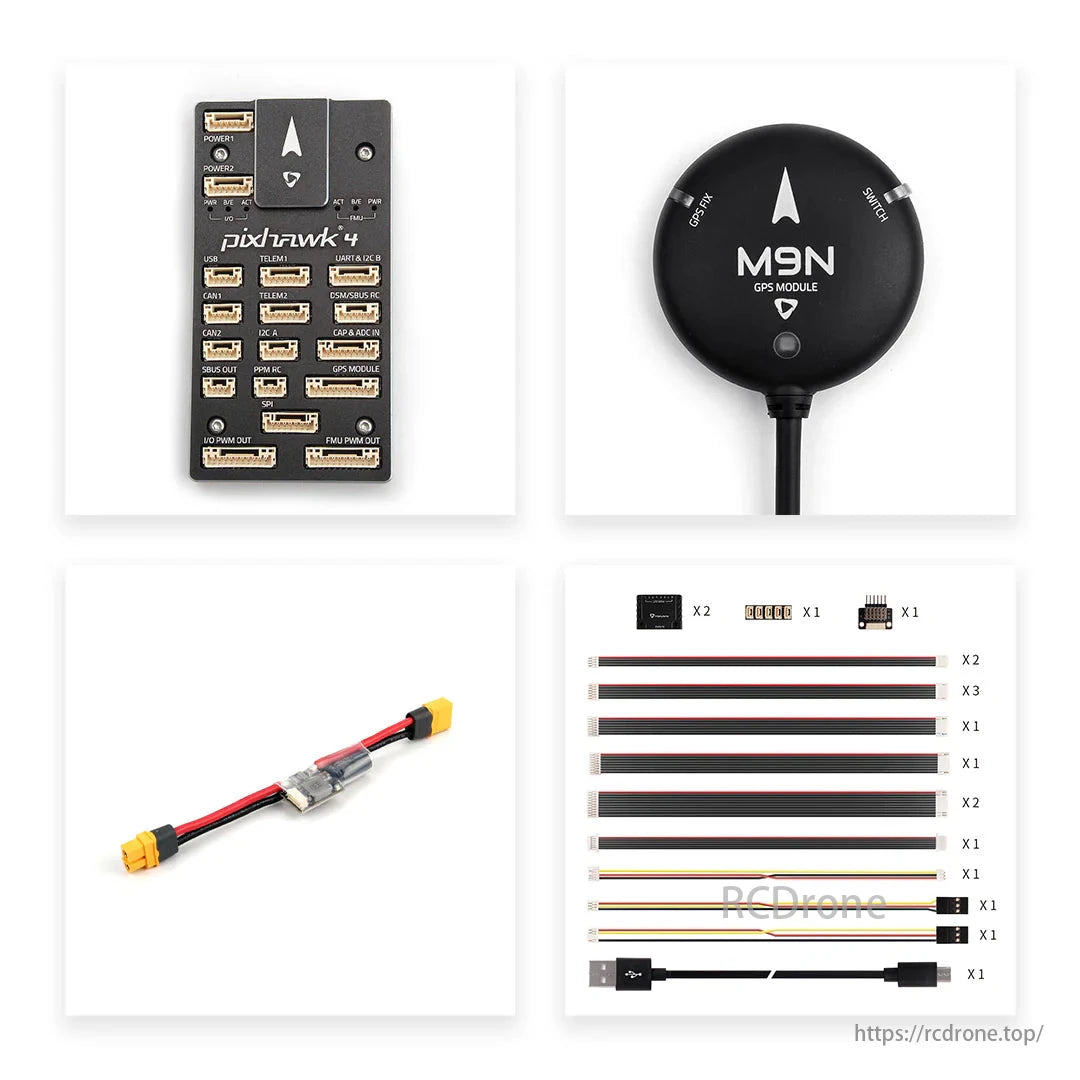
Kontroler lotu Pixhawk 4 z różnymi portami, w tym USB, CAN, TELEM, UART, I2C, SBUS OUT, PPM RC, SPI i modułem GPS.

Kontroler lotu Pixhawk, oparty na systemie autopilota PX4.

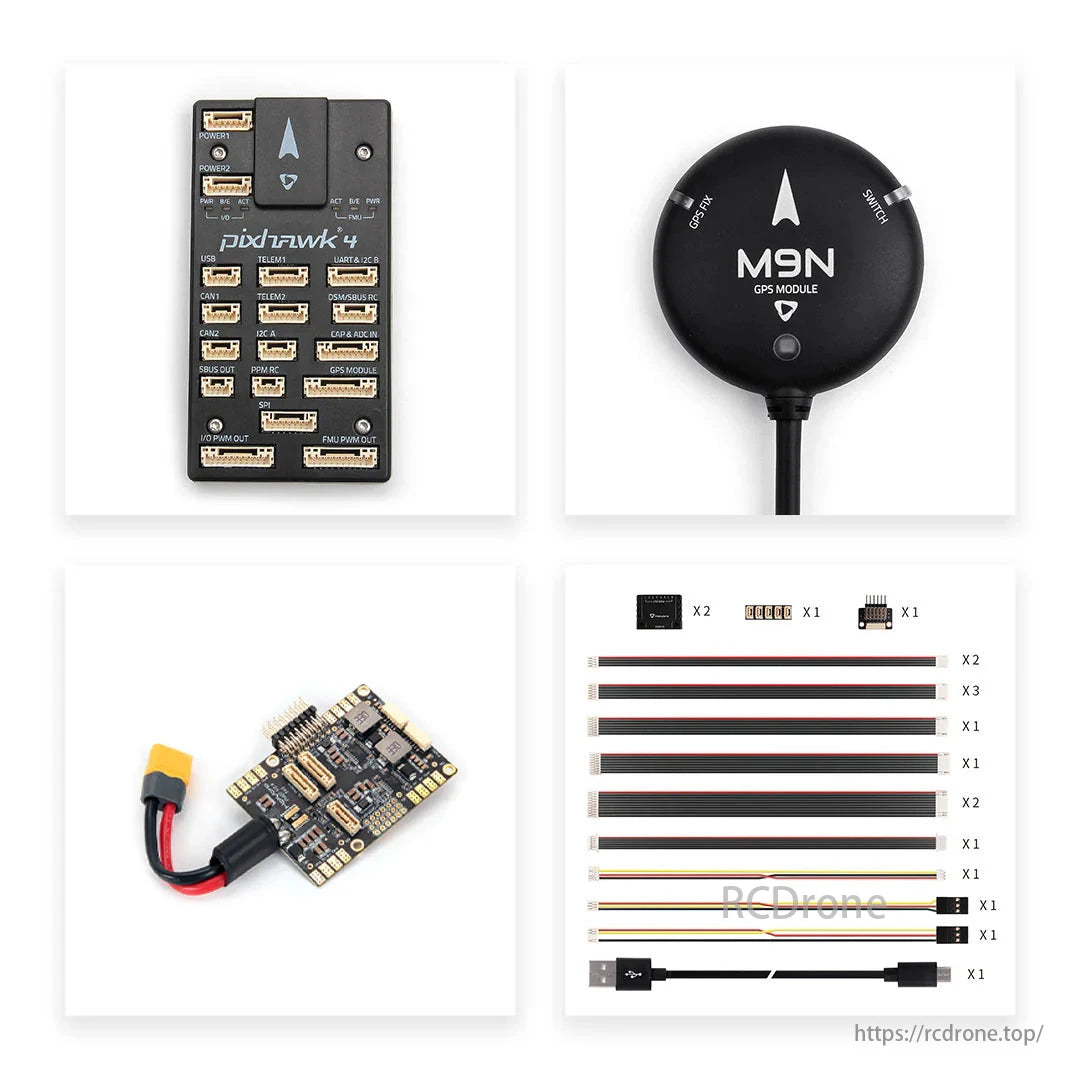
Kontroler lotu Pixhawk 4, moduł GPS M9N, moduł zasilania ze złączem XT60 oraz różne kable do montażu drona RC.

Kontroler lotu Pixhawk 4 z różnymi portami, w tym USB, CAN i modułem GPS. Zawiera moduł zasilania i wiele kabli do połączeń.

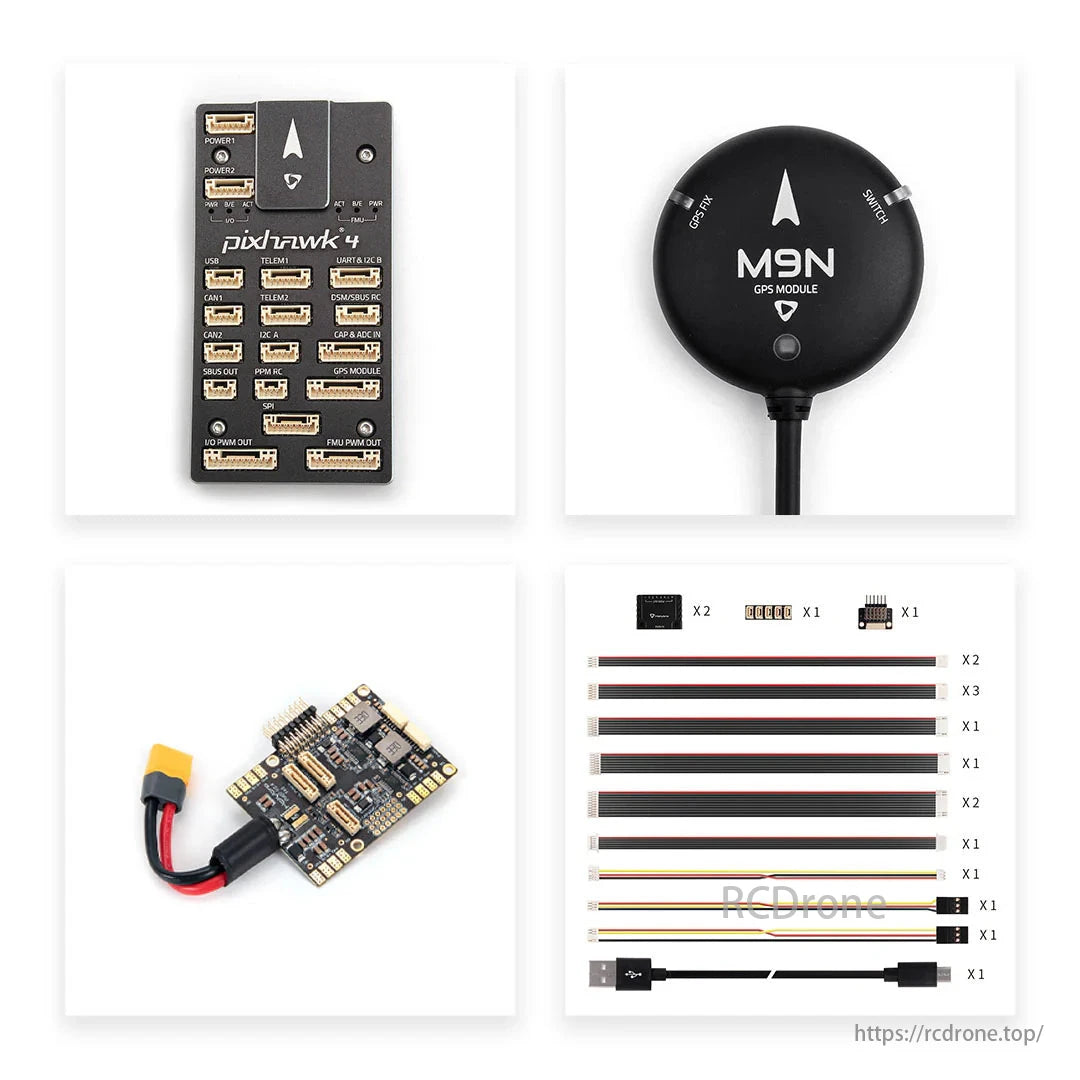
Kontroler lotu Pixhawk 4, moduł GPS M9N, moduł zasilania ze złączem XT60 oraz różne kable do połączeń.
Related Collections