Kontroler lotu Holybro Pixhawk 5X z autopilotem
Kontroler lotu Holybro Pixhawk 5X z autopilotem
HolyBro
Nie można załadować gotowości do odbioru
Pixhawk® 5X to najnowsza aktualizacja udanej rodziny aparatów Jastrząb® kontrolery lotu oparte na otwartym standardzie Pixhawk® FMUv5X i standardzie magistrali autopilota Pixhawk®. Urządzenie jest wyposażone w najnowszy system PX4 Autopilot®, potrójną redundancję, kontrolę temperatury i izolowaną domenę czujników, co zapewnia niesamowitą wydajność i niezawodność.
Wewnątrz Pixhawk® 5X znajduje się procesor STM32F7 firmy STMicroelectronics® w połączeniu z technologią czujników InvenSense® firmy Bosch®, co zapewnia elastyczność i niezawodność sterowania dowolnym pojazdem autonomicznym, nadającym się zarówno do zastosowań akademickich, jak i komercyjnych. Mikrokontroler F7 Pixhawk® 5X ma 2 MB pamięci flash i 512 KB pamięci RAM. Autopilot PX4 korzysta ze zwiększonej mocy i pamięci RAM. Dzięki zaktualizowanej mocy przetwarzania programiści mogą być bardziej produktywni i wydajni w swojej pracy rozwojowej, co pozwala na złożone algorytmy i modele.
Otwarty standard FMUv5X obejmuje wysokowydajne, niskoszumowe IMU na pokładzie, zaprojektowane dla lepszej stabilizacji. Potrójnie redundantny IMU i podwójny redundantny barometr na oddzielnych magistralach. Gdy autopilot PX4 wykryje awarię czujnika, system płynnie przełącza się na inny, aby utrzymać niezawodność sterowania lotem.
Niezależny LDO zasila każdy zestaw czujników z niezależną kontrolą mocy. Nowo zaprojektowana izolacja wibracji filtruje wibracje o wysokiej częstotliwości i redukuje hałas, aby zapewnić dokładne odczyty, umożliwiając pojazdom osiągnięcie lepszych ogólnych osiągów lotu. Zewnętrzna magistrala czujników (SPI5) ma dwie linie wyboru układu i sygnały gotowości danych dla dodatkowych czujników i ładunku z interfejsem SPI, a dzięki zintegrowanemu układowi Microchip Ethernet PHY (LAN8742AI-CZ-TR) obsługiwana jest teraz szybka komunikacja z komputerami misji za pośrednictwem sieci Ethernet. Dwa inteligentne porty monitorowania baterii (SMBus), obsługa modułu zasilania INA226 SMBus.
Pixhawk® 5X jest idealny dla programistów w laboratoriach badawczych przedsiębiorstw, startupów, pracowników naukowych (badań, profesorów, studentów) i zastosowań komercyjnych. Pixhawk 5X jest kompatybilny zarówno z PX4 Autopilot & Oprogramowanie układowe Ardupilot.
Notatka:
- Pixhawk 5X wymaga protokołu I2C do danych o napięciu i natężeniu prądu z modułu zasilania, takiego jak PM02D, analogowe moduły zasilania (PM02, PM06, PM07) nie są kompatybilne z Pixhawk 5X. Tabela porównawcza modułów zasilania
- Domyślnie jest dostarczany z firmware PX4. Użytkownik może również użyć firmware Ardupilot, flashując firmware przez Mission Planner lub QGroundControl.
Kluczowe punkty projektu
- Modułowy kontroler lotu: oddzielne IMU, FMU i system bazowy połączone 100-stykowym i 50-stykowym złączem magistrali autopilota Pixhawk®, zaprojektowane dla elastycznych i konfigurowalnych systemów
- Nadmiarowość: 3 czujniki IMU i 2 czujniki barometru na oddzielnych magistralach, co umożliwia równoległą i ciągłą pracę nawet w przypadku awarii sprzętu
- Domeny potrójnej redundancji: całkowicie odizolowane domeny czujników z oddzielnymi magistralami i oddzielnym sterowaniem zasilaniem
- System izolacji drgań filtrujący drgania o wysokiej częstotliwości i redukujący hałas, co zapewnia dokładne odczyty
- Interfejs Ethernet do integracji komputera misyjnego o dużej prędkości
- Automatyczna kalibracja czujnika eliminująca zmienne sygnały i temperatury
- Temperaturę IMU kontroluje się za pomocą pokładowych rezystorów grzewczych, co pozwala na uzyskanie optymalnej temperatury pracy IMU
Specyfikacja techniczna
- Procesor FMU: STM32F765
- 32-bitowy Arm® Cortex®-M7, 216 MHz, pamięć 2 MB, 512 KB RAM
- Procesor IO: STM32F100
- 32-bitowy Arm® Cortex®-M3, 24 MHz, 8 KB SRAM
- Czujniki pokładowe
- Akcelerator/żyroskop: ICM-20649 (mocowany na stałe)
- Akcelerator/żyroskop: ICM-42688P (montaż miękki)
- Akcelerator/żyroskop: ICM-20602 lub BMI088 (Miękko zamontowane)
- Magazyn: BMM150
- Barometr: 2x BMP388
Dane elektryczne
- Napięcie znamionowe:
- Maksymalne napięcie wejściowe: 6V
- Wejście zasilania USB: 4,75~5,25 V
- Wejście szyny serwa: 0~36V
Interfejsy
- 16- Wyjścia serwa PWM
- Wejście R/C dla Spektrum / DSM
- Dedykowane wejście R/C dla PPM i wejścia S.Bus
- Dedykowane wejście analogowe/PWM RSSI i S.Wyjście magistrali
- 4 porty szeregowe ogólnego przeznaczenia
- 3 z pełną kontrolą przepływu
- 1 z oddzielnym ograniczeniem prądu 1A
- 1 z I2C i dodatkową linią GPIO do zewnętrznego czytnika NFC
- 2 porty GPS
- 1 pełny GPS plus port przełącznika bezpieczeństwa
- 1 podstawowy port GPS
- 1 port I2C
- 1 port Ethernetowy
- Aplikacje beztransformatorowe
- 100 Mb/s
- 1 magistrala SPI
- 2 linie wyboru żetonów
- 2 linie gotowe do danych
- 1 linia SPI SYNC
- 1 linia resetowania SPI
- 2 magistrale CAN dla urządzeń peryferyjnych CAN
- Magistrala CAN posiada indywidualne sterowanie ciche lub sterowanie ESC RX-MUX
- 2 porty wejściowe zasilania z magistralą SMBus
- 1 port AD i IO
- 2 dodatkowe wejścia analogowe
- 1 wejście PWM/przechwytywania
- 2 dedykowane linie debugowania i GPIO
Dane mechaniczne
- Wymiary
- Moduł kontrolera lotu: 38,8 x 31,8 x 14,6 mm
- Miniaturowa listwa przypodłogowa: Wymiary: 43,4 x 72,8 x 14,2 mm
- Standardowa listwa przypodłogowa v1: 52,4 x 103,4 x 16,7 mm
- Standardowa listwa przypodłogowa v2A: 40,2 x 92,3 x 18,4 mm
- Standardowa listwa przypodłogowa v2B: 40,2 x 98,3 x 16,9 mm
- Waga
- Moduł kontrolera lotu: 23g
- Mini listwa przypodłogowa: 26.8g
- Standardowa listwa przypodłogowa v1: 51g
- Standardowa listwa przypodłogowa v2A: 58g
- Standardowa listwa przypodłogowa v2B: 58g
SKU 11045 zawiera:
- Moduł kontrolera lotu Pixhawk 5X
SKU 20307/SKU 20320/SKU20310 zawiera:
- Moduł kontrolera lotu Pixhawk 6X
- Standardowa listwa przypodłogowa v2A/v2B lub Mini listwa przypodłogowa
- Moduł mocy wysokiego napięcia PM02D
- Zestaw kabli
- Moduł kontrolera lotu Pixhawk 6X
- Standardowa listwa przypodłogowa v2A/v2B lub Mini listwa przypodłogowa
- Moduł mocy wysokiego napięcia PM02D
- Zestaw kabli
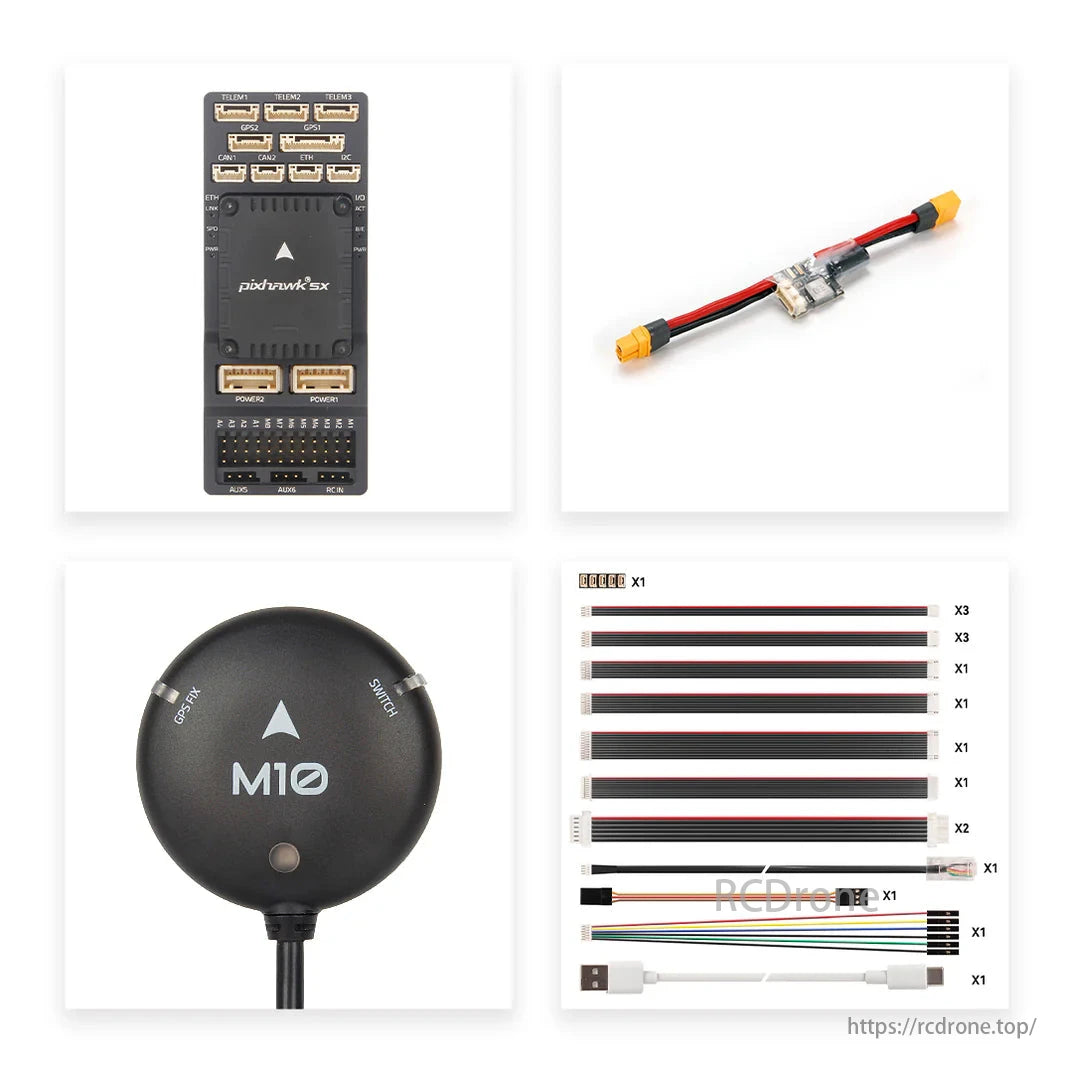
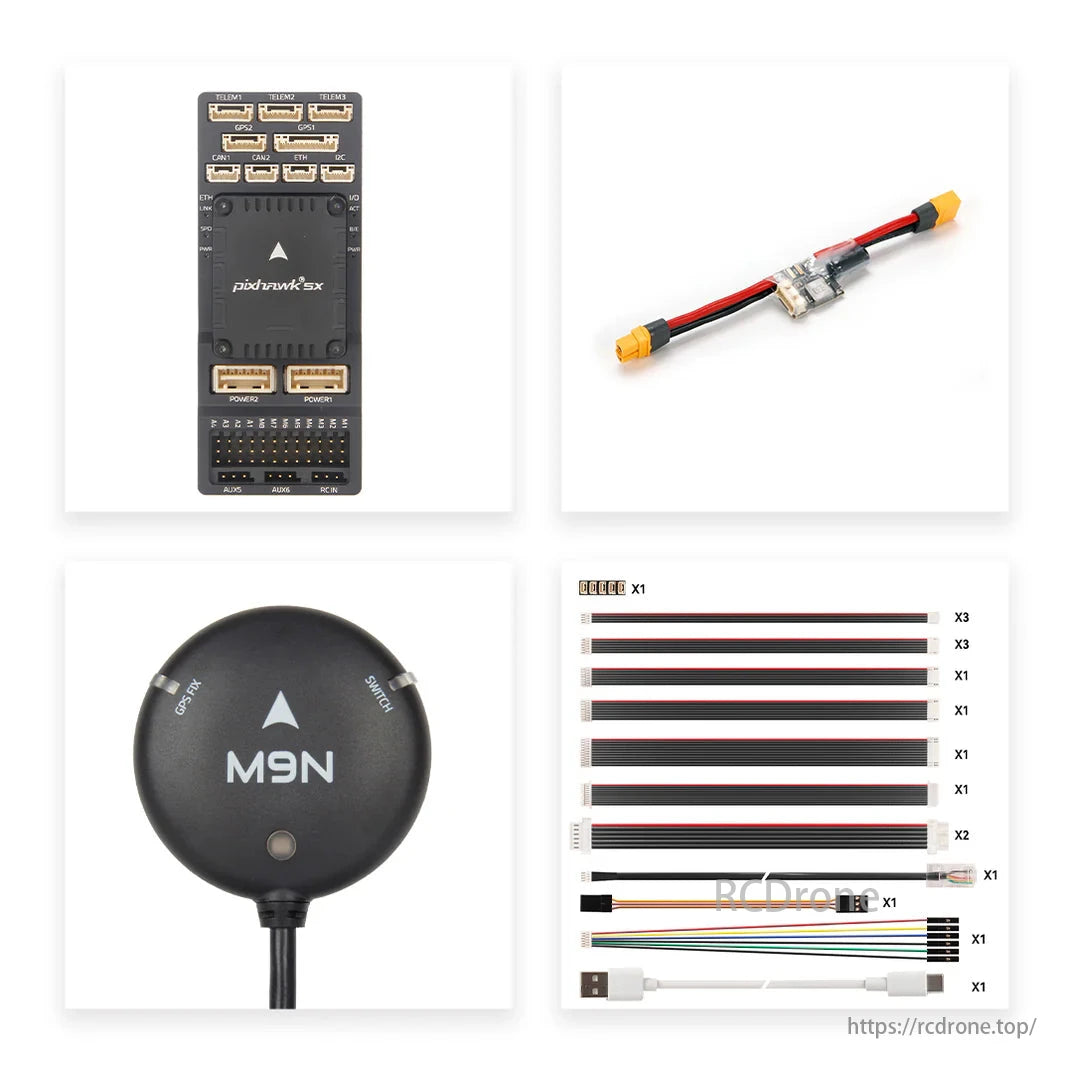
- M9N/M10 GPS
Pixhawk mini, Pixhawk Baseboard v1 i dwa warianty Pixhawk Baseboard v2 (v2A i v2B) są pokazane z wymiarami. Mini ma 43,4 x 72,8 mm, v1 ma 52 x 101,90 mm, v2A ma 40,2 x 92,3 mm, a v2B ma 40,2 x 98,3 mm.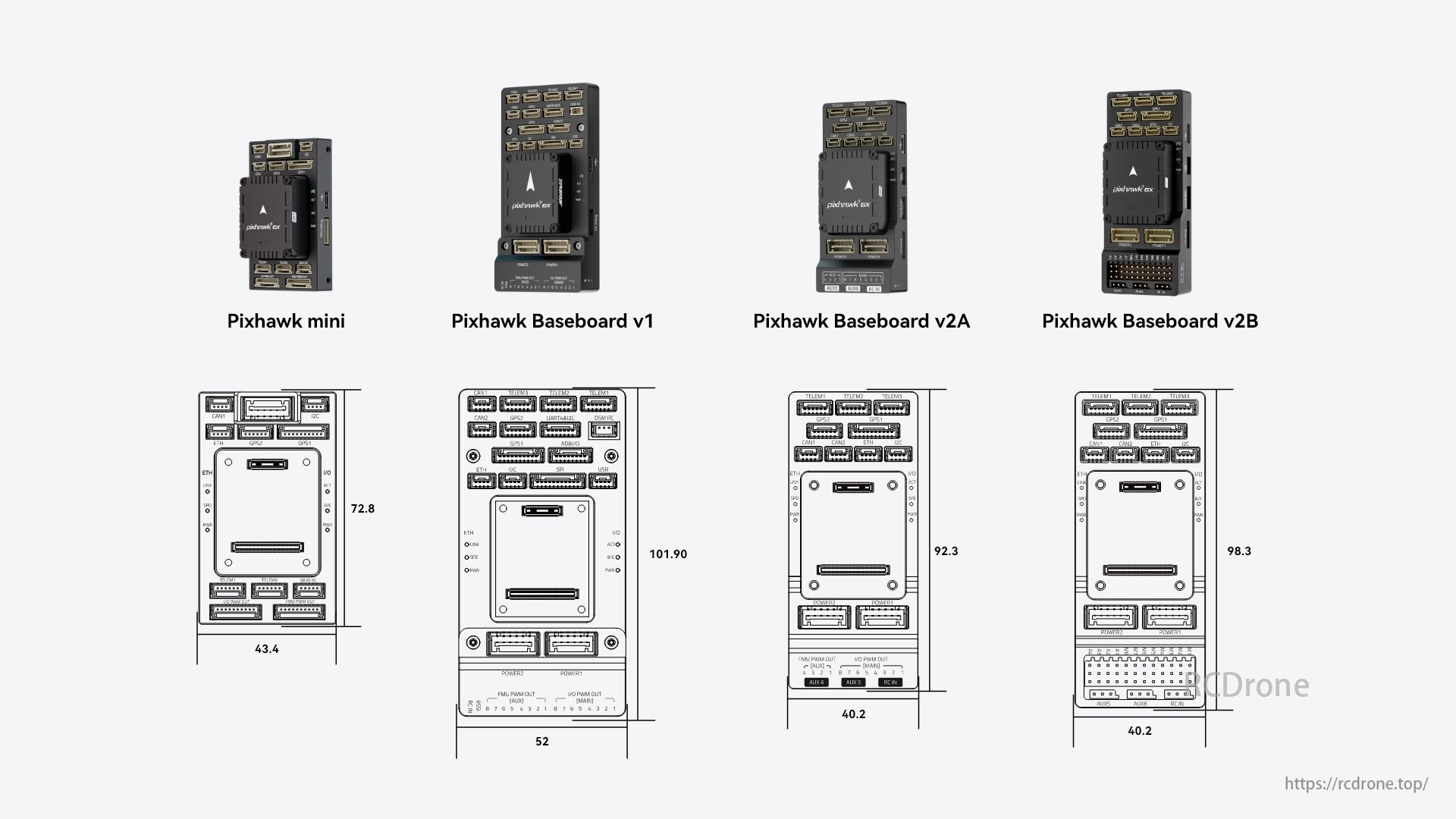
Przewodnik po przykładach okablowania

Schemat Holybro Pixhawk 5X obejmuje podstawowy i pomocniczy odbiornik GPS, porty UART4 i I2C, CAN1 i 2, odbiornik DSM RC, radio telemetryczne, kamerę HD FPV IP, akumulator, moduł zasilania, regulatory ESC oraz płytkę rozdzielczą zasilania.
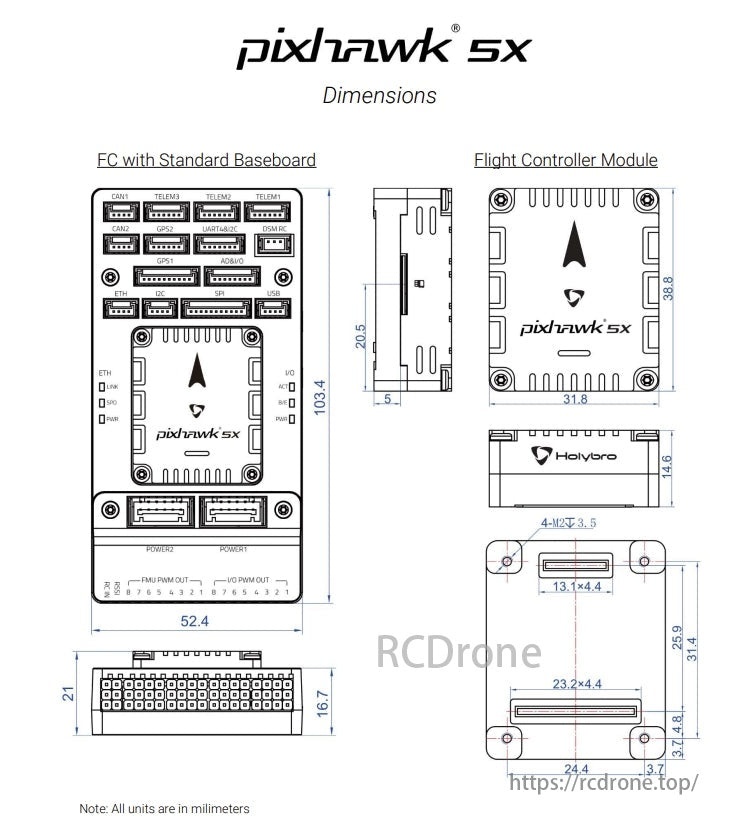
Wymiary Pixhawk SX obejmują moduł kontrolera lotu i FC ze standardową płytą bazową. Moduł ma wymiary 31,8 x 38,8 mm, a płyta bazowa 103,4 x 52,4 mm. Wszystkie jednostki są w milimetrach.

Standardowe wymiary listwy przypodłogowej: 103,4 x 58 x 10,7 mm, z różnymi portami i złączami, w tym USB, Ethernet i wejściami zasilania.


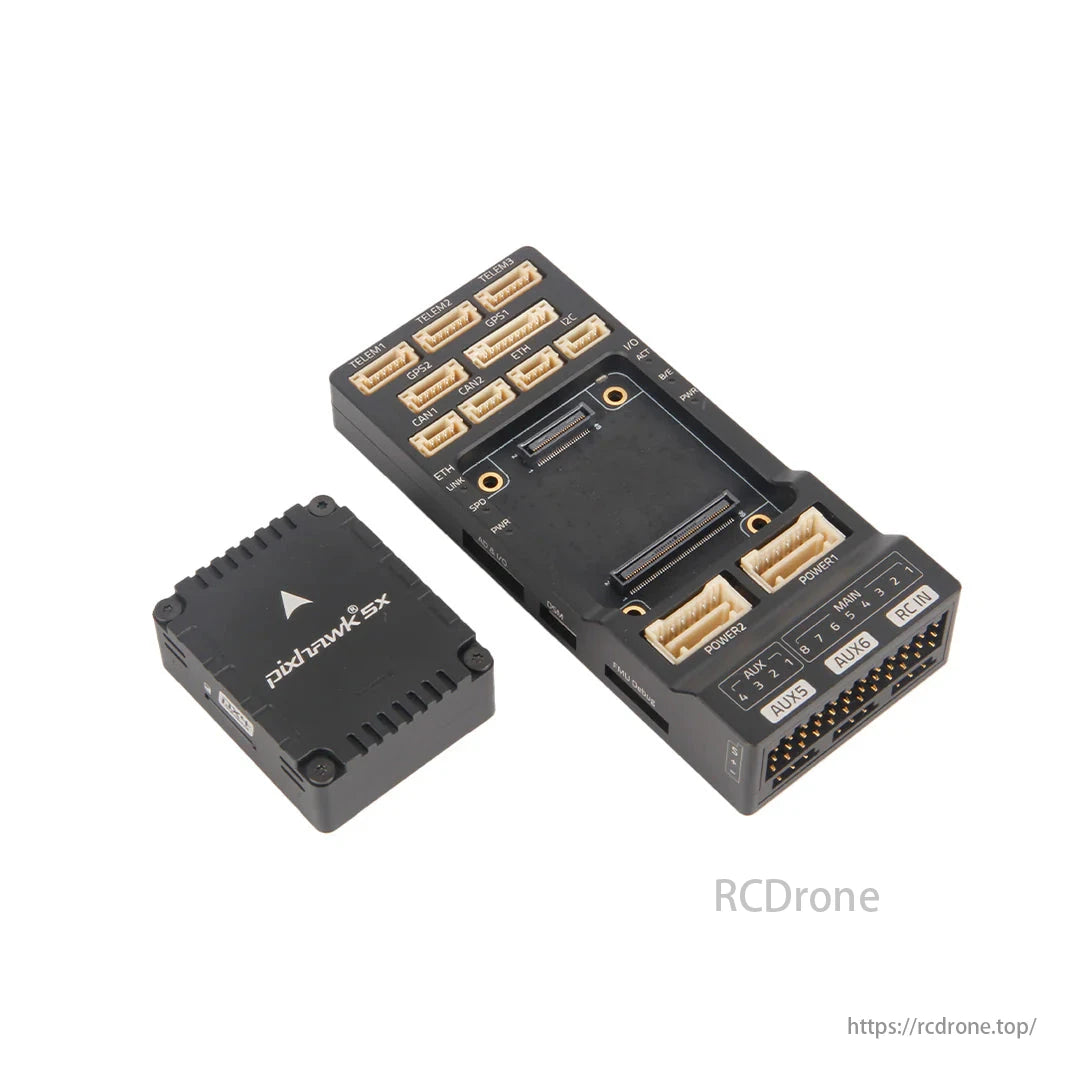
Kontroler lotu Pixhawk 5X z portami TELEM1-3, GPS1-2, CAN1-2, ETH, I2C, POWER1-2, AUX5-6 i RC IN.
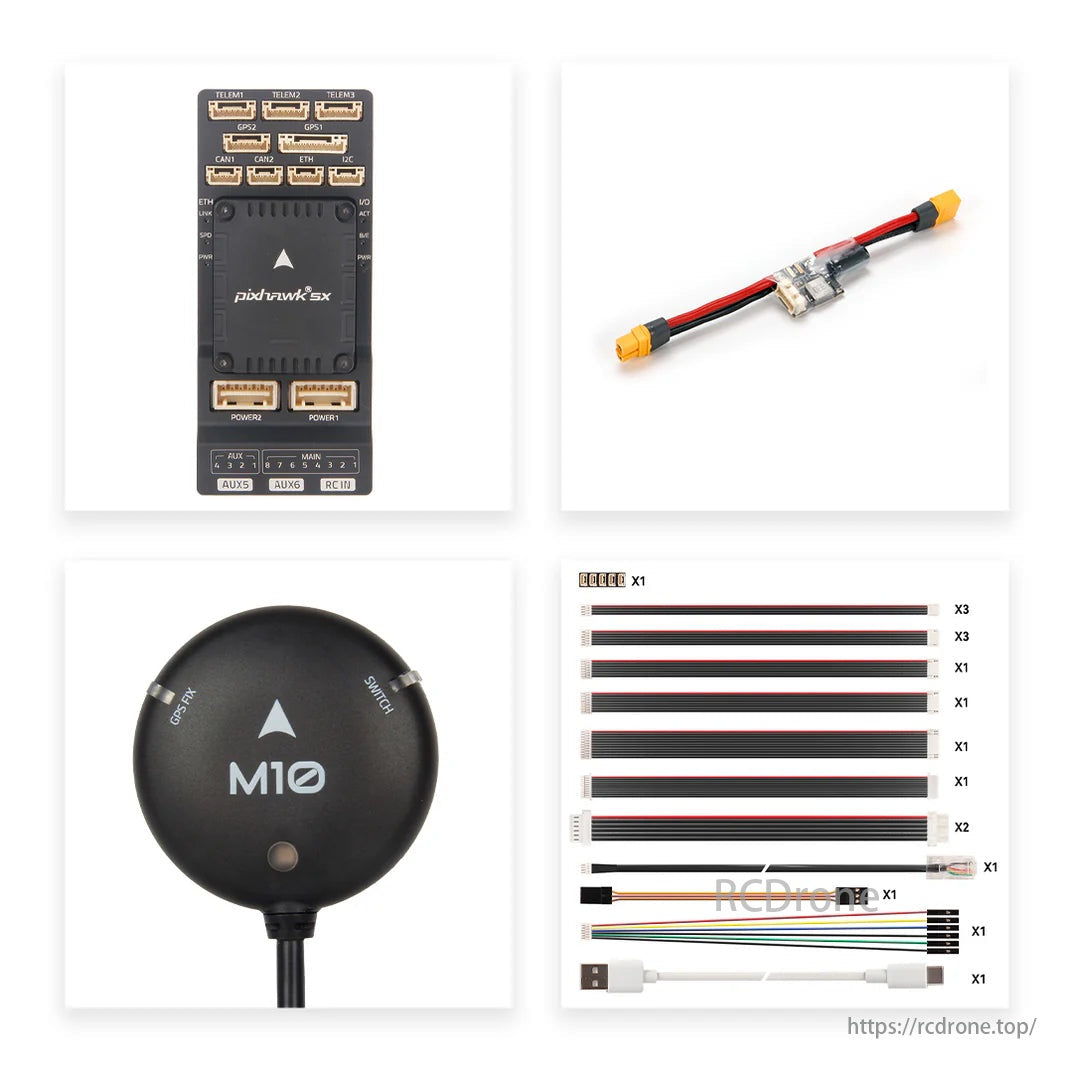
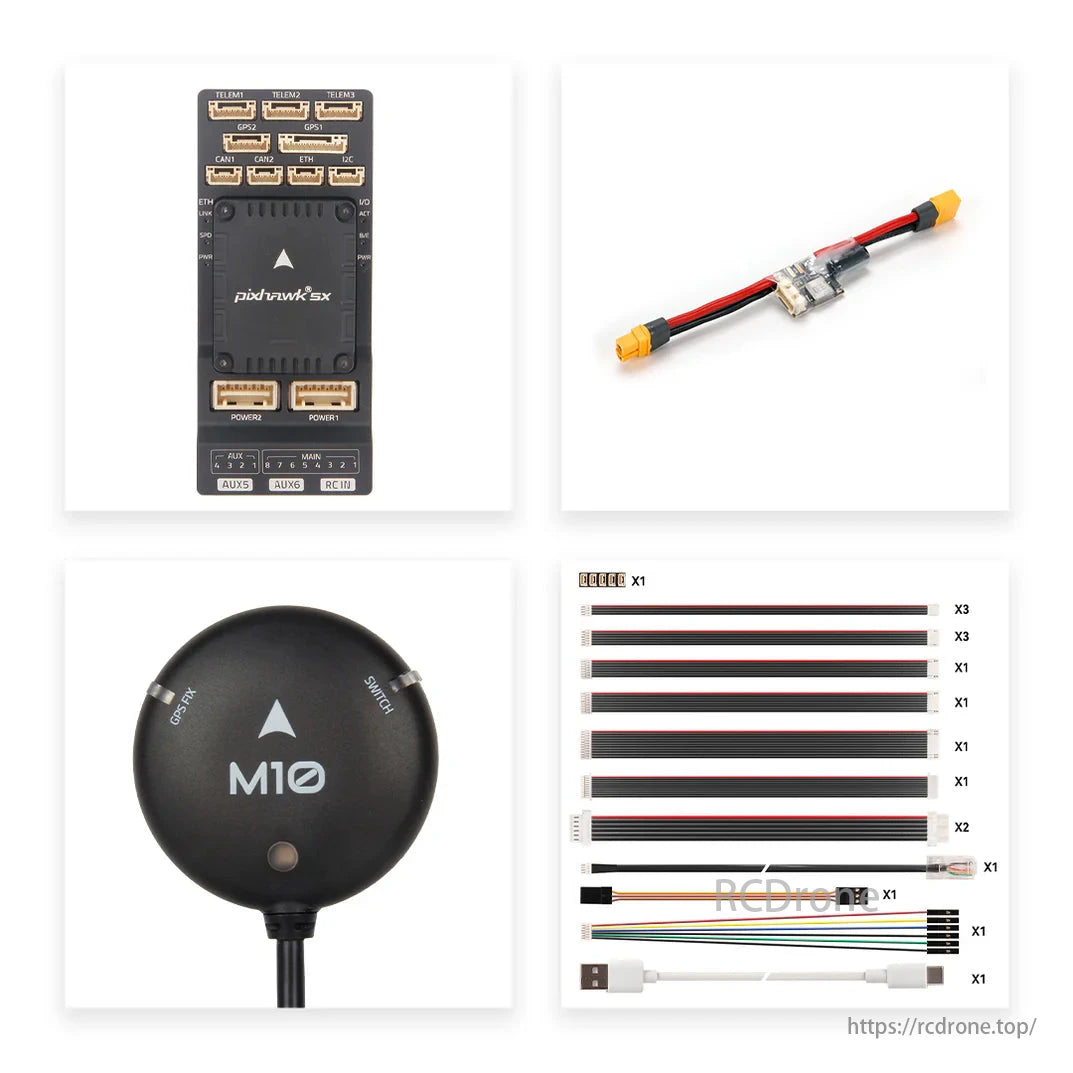
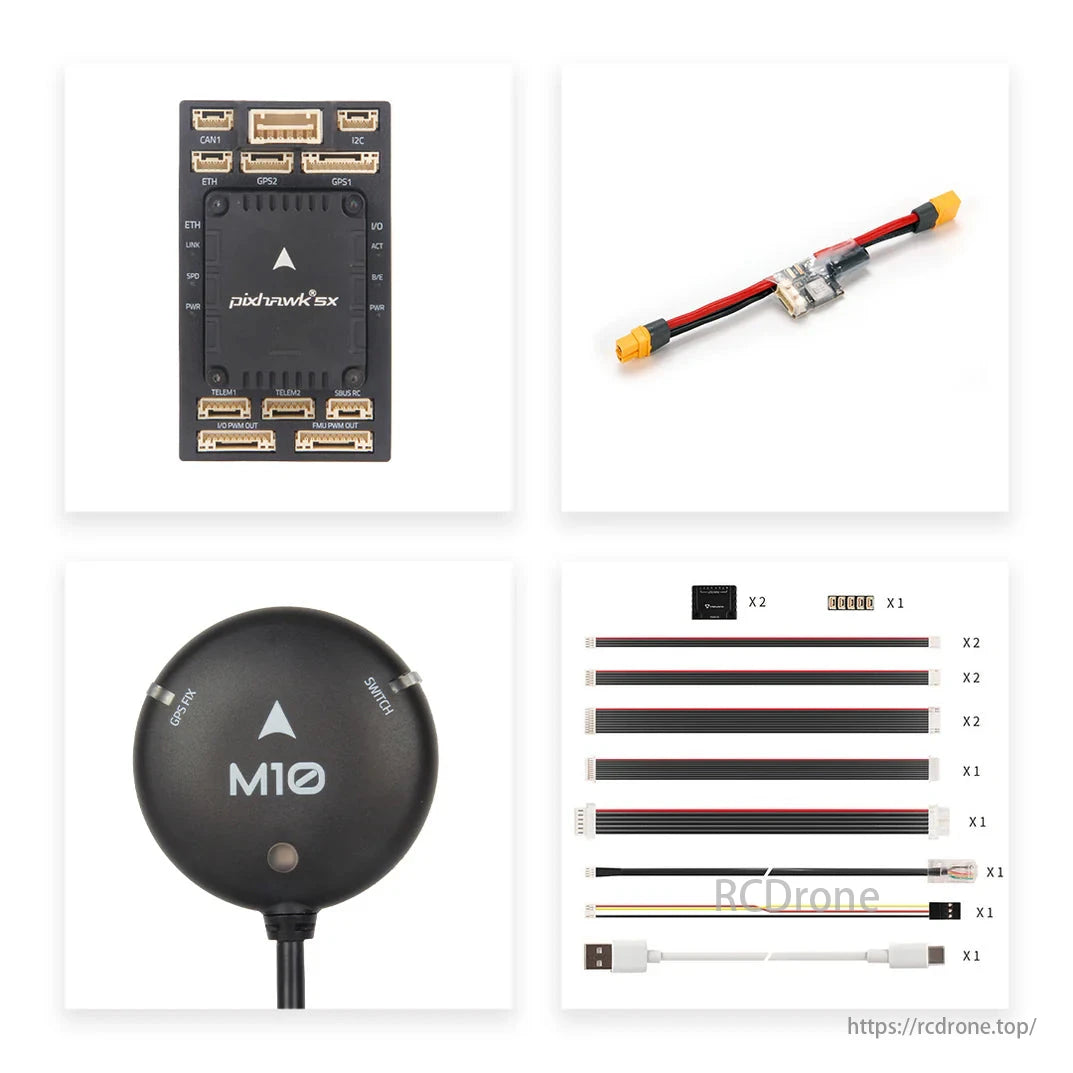
Kontroler lotu Pixhawk 5X, moduł GPS M10, moduł zasilania i różne kable do montażu drona.
Related Collections