Holybro Pixhawk 6X Autopilot H753 moduł kontrolera lotu standardowa podstawa/mini podstawa PM02D M9N M10 GPS RC samoloty wielowirnikowe
Holybro Pixhawk 6X Autopilot H753 moduł kontrolera lotu standardowa podstawa/mini podstawa PM02D M9N M10 GPS RC samoloty wielowirnikowe
HolyBro
Nie można załadować gotowości do odbioru
Holybro Pixhawk 6X Autopilot H753 Moduł kontrolera lotu dla dronów i samolotów wielowirnikowych
Holybro Pixhawk 6X Autopilot H753 Flight Controller to zaawansowany modułowy kontroler lotu przeznaczony do przemysłowych i komercyjnych dronów wielowirnikowych i samolotów ze skrzydłami stałymi. Wyposażony w najnowocześniejszą technologię i różnorodne konfiguracje, Pixhawk 6X zapewnia niezrównaną wydajność i niezawodność w wymagających zastosowaniach.
Główne cechy
1. Zaawansowana redundancja i technologia BalancedGyro™
Pixhawk 6X zawiera potrójną redundancję z trzema czujnikami IMU ICM-45686 (±32 g) i dwoma czujnikami barometru. Czujniki te są całkowicie odizolowane i działają na oddzielnych magistralach z oddzielnym sterowaniem mocą, zapewniając niezawodność w krytycznych misjach. Technologia BalancedGyro™ optymalizuje dokładność i stabilność czujnika.
2. Procesor o wysokiej wydajności
Zasilany procesorem STM32H753 o taktowaniu do 480 MHz, kontroler lotu oferuje wyjątkowe możliwości obliczeniowe. Zawiera 2 MB pamięci flash i 1 MB pamięci RAM dla płynnego wykonywania misji.
3. Projekt modułowy
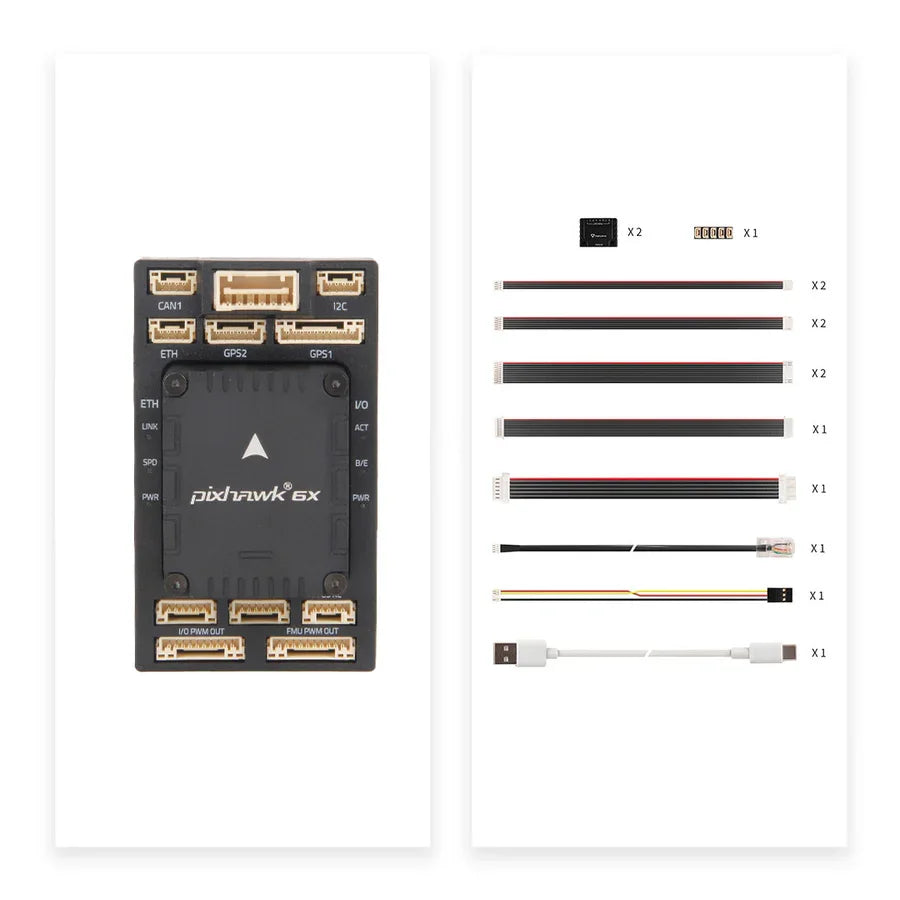
Pixhawk 6X ma modułową konstrukcję z oddzielnymi systemami IMU, FMU i Base. Komponenty te są połączone za pomocą 100-stykowego i 50-stykowego złącza Pixhawk® Autopilot Bus, co umożliwia elastyczną personalizację i konserwację.
4. Nowy system izolacji drgań
Wykorzystując specjalnie opracowany, trwały materiał izolujący drgania, innowacyjny system tłumienia w urządzeniu Pixhawk 6X gwarantuje optymalną wydajność IMU przy częstotliwościach rezonansowych w wyższym spektrum, dzięki czemu urządzenie idealnie nadaje się do zastosowań przemysłowych i komercyjnych.
5. Interfejs Ethernet
Interfejs Ethernet obsługuje szybką integrację komputera misyjnego, umożliwiając bezproblemową wymianę danych na potrzeby zaawansowanej kontroli misji.
6. Płytka IMU z kontrolą temperatury
Płyta IMU pracuje w optymalnym zakresie temperatur, zapewniając spójną wydajność nawet w trudnych warunkach.
7. Szeroka kompatybilność oprogramowania układowego
Wersja Rev 8 obsługuje firmware PX4 (1.14.3 lub nowszy) i firmware Ardupilot (4.5.0 lub nowszy). Użytkownicy mogą flashować firmware za pomocą Mission Planner lub QGroundControl, aby dostosować go do swoich konkretnych wymagań.
Konfiguracje
Holybro Pixhawk 6X jest dostępny w różnych konfiguracjach, aby sprostać zróżnicowanym potrzebom:
-
Standardowa listwa przypodłogowa: Wymiary: 52,4 x 102 x 16,7 mm; Waga: 72,5 g (aluminium)
-
Miniaturowa listwa przypodłogowa: Wymiary: 43,4 x 72,8 x 14,2 mm; Waga: 26.5g
-
Opcjonalne moduły GPS: M9N, M10 GPS dla precyzyjnej nawigacji
-
Moduły mocy: PM02D zapewniające niezawodne dostarczanie energii
Specyfikacje
Procesory i czujniki:
-
Procesor FMU: STM32H753 32-bitowy Arm® Cortex®-M7, 480MHz, pamięć flash 2MB, pamięć RAM 1MB
-
Procesor IO: STM32F103 32-bitowy Arm® Cortex®-M3, 72MHz, 64KB SRAM
-
Czujniki IMU: 3x ICM-45686 z technologią BalancedGyro™
-
Barometry: ICP20100 i BMP388
-
Magnetometr: BMM150
-
Bezpieczny element: NXP EdgeLock SE050 Sprzęt Plug & Trust
Dane elektryczne:
-
Napięcie znamionowe:
-
Maksymalne napięcie wejściowe: 6V
-
Wejście zasilania USB: 4,75~5,25 V
-
Wejście szyny serwa: 0~36V
-
-
Aktualne oceny:
-
Ogranicznik prądu wyjściowego Telem1: 1,5 A
-
Ogranicznik prądu wyjściowego wszystkich pozostałych portów: 1,5 A
-
-
Napięcie sygnału PWM: Domyślnie 3,3 V (możliwość regulacji do 5 V za pomocą modyfikacji rezystora pokładowego)
Dane mechaniczne:
-
Wymiary modułu kontrolera lotu: 38,8 x 31,8 x 16,8 mm; Waga: 31,3 g
-
Opcje listew przypodłogowych:
-
Standardowa listwa przypodłogowa: 52,4 x 102 x 16,7 mm; Waga: 72,5 g
-
Miniaturowa listwa przypodłogowa: 43,4 x 72,8 x 14,2 mm; Waga: 26,5 g
-
Aplikacje
Holybro Pixhawk 6X jest przeznaczony dla:
-
Drony wielowirnikowe przemysłowe i komercyjne
-
Nawigacja samolotu ze stałym skrzydłem
-
Zaawansowana kontrola misji z szybką integracją danych
Niezależnie od tego, czy budujesz niestandardowy wielowirnikowiec, czy ulepszasz system ze stałym skrzydłem, Holybro Pixhawk 6X Autopilot oferuje wszechstronne, solidne i niezawodne rozwiązanie. Jego modułowa konstrukcja, zaawansowana technologia i wiele opcji konfiguracji zapewniają, że spełnia potrzeby każdej profesjonalnej aplikacji.
Related Collections