Holybro Pixhawk 6X (ICM-45686) Kontroler lotu – Potrójny redundantny IMU, STM32H753, Ethernet, kompatybilny z PX4 i ArduPilot
Holybro Pixhawk 6X (ICM-45686) Kontroler lotu – Potrójny redundantny IMU, STM32H753, Ethernet, kompatybilny z PX4 i ArduPilot
HolyBro
Nie można załadować gotowości do odbioru
Przegląd
Kontroler lotu Holybro Pixhawk 6X (ICM-45686) to wysokowydajny, modułowy autopilot zaprojektowany do wymagających zastosowań przemysłowych i komercyjnych dronów. Wyposażony w potrójnie redundantne IMU ICM-45686 z technologią BalancedGyro™, podwójne barometry oraz procesor STM32H753 działający z prędkością 480 MHz, Pixhawk 6X zapewnia niezrównaną niezawodność, wydajność w czasie rzeczywistym i elastyczność. Jego modułowa architektura, zaawansowana izolacja wibracji oraz interfejs Ethernet czynią go idealnym rozwiązaniem dla systemów UAV wymagających solidnej kontroli, precyzji i adaptacyjności misji.
Kluczowe cechy
-
Potrójna redundancja IMU: 3x ICM-45686 IMU (±32g) z technologią BalancedGyro™ dla odpornej na błędy nawigacji inercyjnej
-
Podwójne barometry: ICP20100 i BMP388 dla zwiększonej dokładności wysokości
-
Procesor o wysokiej prędkości: STM32H753 Cortex-M7, 480MHz, z 2MB Flash & 1MB RAM
-
Modularna konstrukcja: Oddziela FMU, IMU i płytę bazową, połączone przez 100-pinowy i 50-pinowy szereg Pixhawk®
-
Płytka IMU z kontrolą temperatury: Zapewnia optymalną wydajność czujników w różnych zakresach temperatur
-
Integracja Ethernet: Wspiera szybką komunikację z komputerami misji
-
Wsparcie dla cyfrowego modułu zasilania: Dostarcza dokładniejsze pomiary napięcia i prądu
Zaawansowany system izolacji: Trwały, specjalnie opracowany materiał zapewnia wysokospektralne tłumienie drgań
-
Kompatybilność oprogramowania układowego: Wysyłane z PX4 (v1.14.3+), wspiera ArduPilot (v4.5.0+)
Specyfikacje
Procesory i czujniki
| Komponent | Szczegóły |
|---|---|
| Procesor FMU | STM32H753, ARM Cortex-M7, 480MHz, 2MB Flash, 1MB RAM |
| Procesor IO | STM32F103, ARM Cortex-M3, 72MHz |
| Czujniki IMU | 3x ICM-45686 (BalancedGyro™) |
| Barometr | ICP20100 & BMP388 |
| Magnetometr | BMM150 |
| Element zabezpieczający | NXP SE050 Plug & Trust |
Parametry elektryczne
| Parametr | Value |
|---|---|
| Maksymalne napięcie wejściowe | 6V |
| Wejście zasilania USB | 4.75~5.25V |
| Napięcie szyny serw | 0~36V |
| Limit prądu Telem1 & GPS2 | 1.5A łącznie |
| Limit prądu innych portów | 1.5A łącznie |
| Napięcie sygnału PWM | Domyślnie 3.3V (przełączalne na 5V za pomocą rezystora) |
| Temperatura pracy | -25°C do +85°C |
Wymiary mechaniczne i waga
| Komponent | Wymiary (mm) | Waga (g) |
|---|---|---|
| Kontroler lotu | 38.8 x 31.8 x 16.8 | 31.3g |
| Standardowa płyta bazowa | 52.4 x 102 x 16.7 | 72.5g |
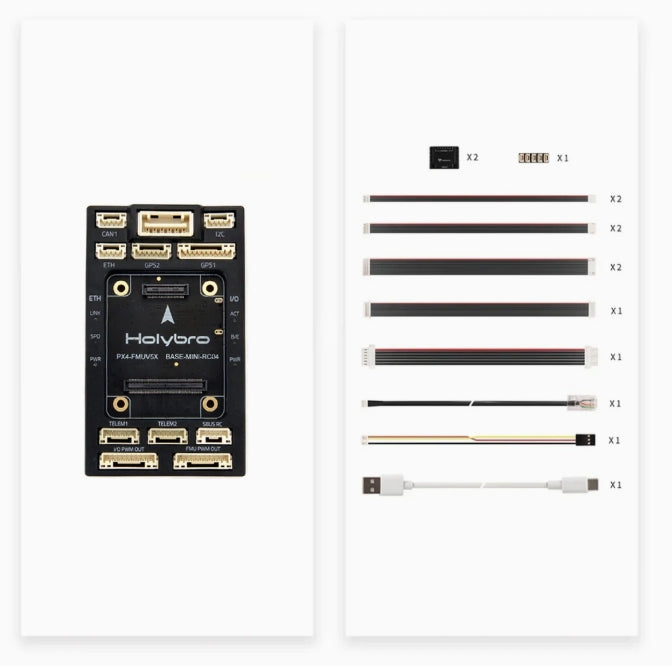
| Mini Płyta Bazowa | 43.4 x 72.8 x 14.2 | 26.5g |
Kompatybilność Oprogramowania
-
PX4: W pełni wspierane od wersji 1.14.3 i wyżej
-
ArduPilot: W pełni wspierane od wersji 4.5.0 i więcej
-
Wsparcie dla aktualizacji oprogramowania za pośrednictwem Mission Planner lub QGroundControl
Aplikacje
Idealne do integracji w:
-
Drony przemysłowe
-
Komercyjne systemy UAV
-
Samoloty VTOL
-
Platformy badawcze w dziedzinie akademickiej
-
Misje wielosensorowe i o wysokiej niezawodności
Szczegóły

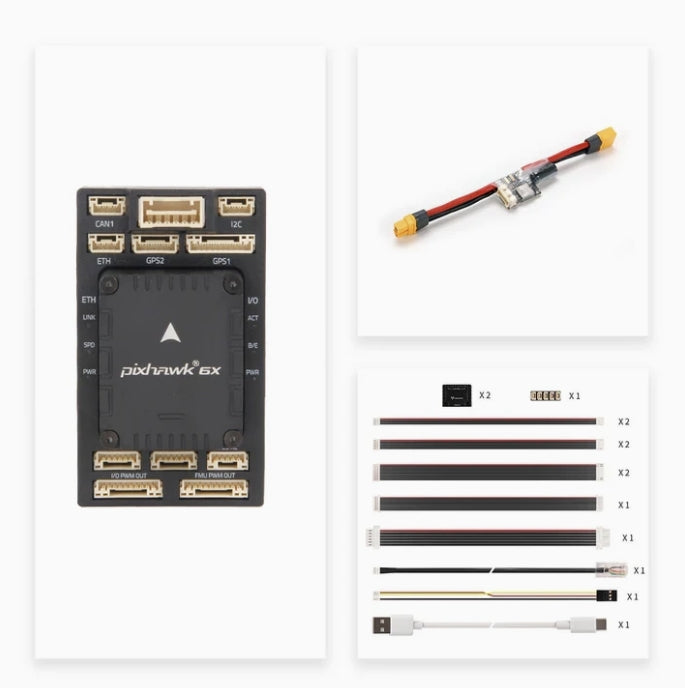
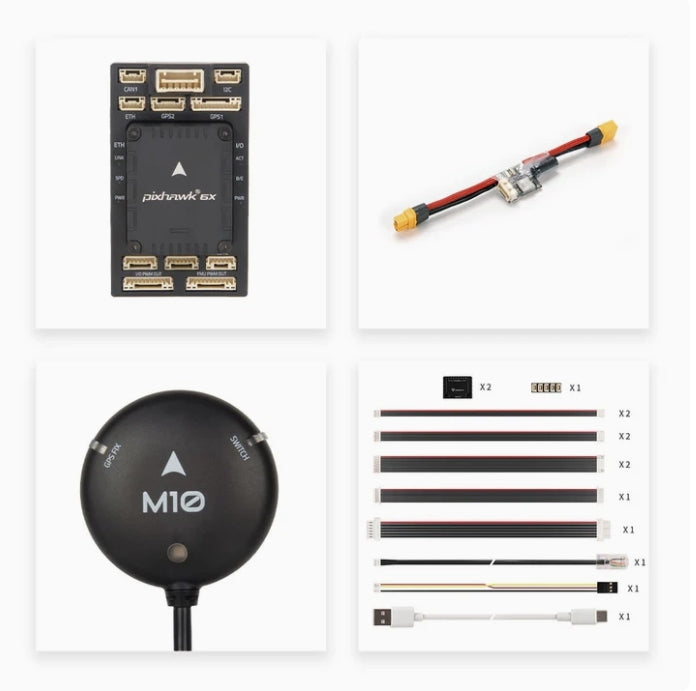
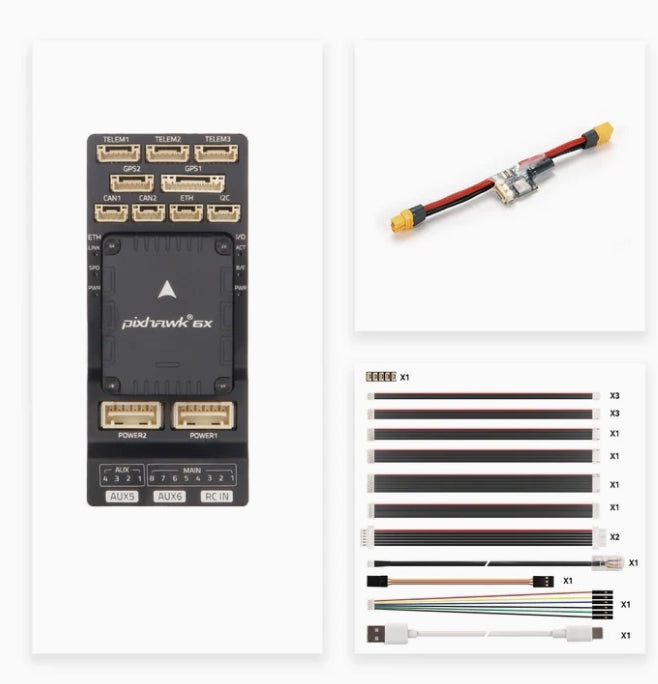
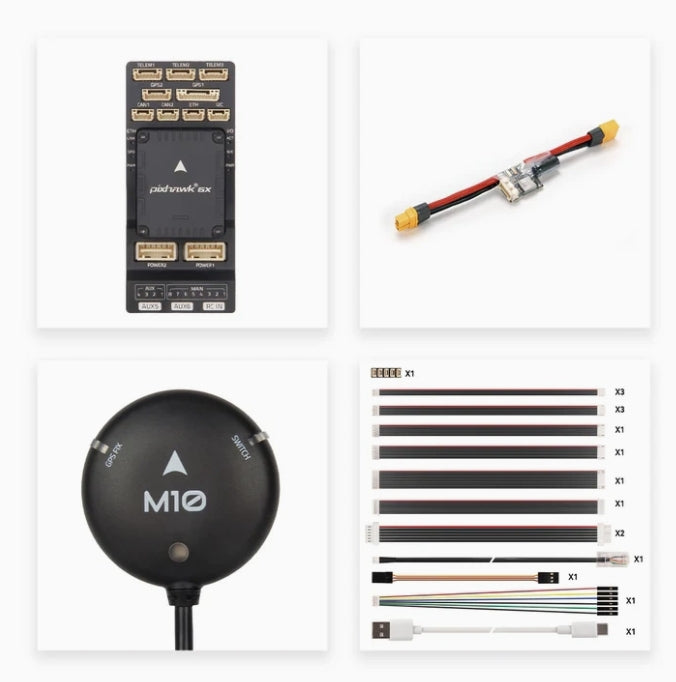
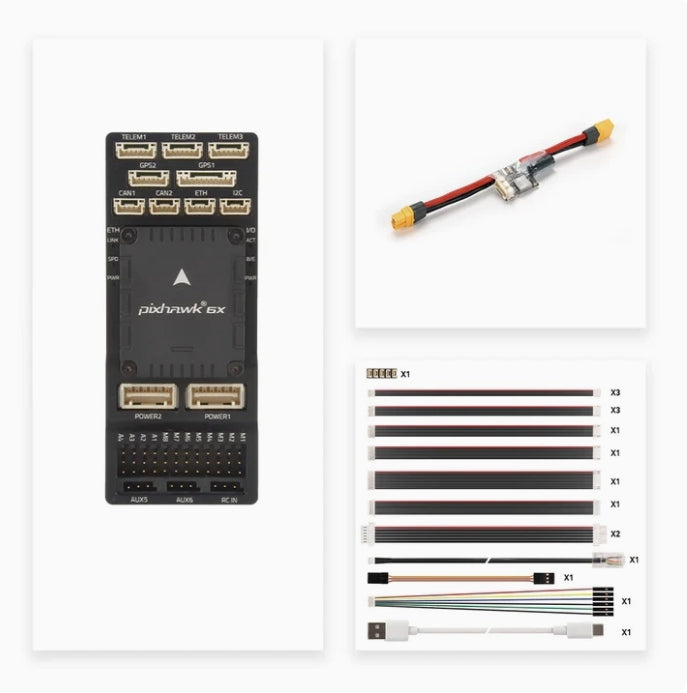
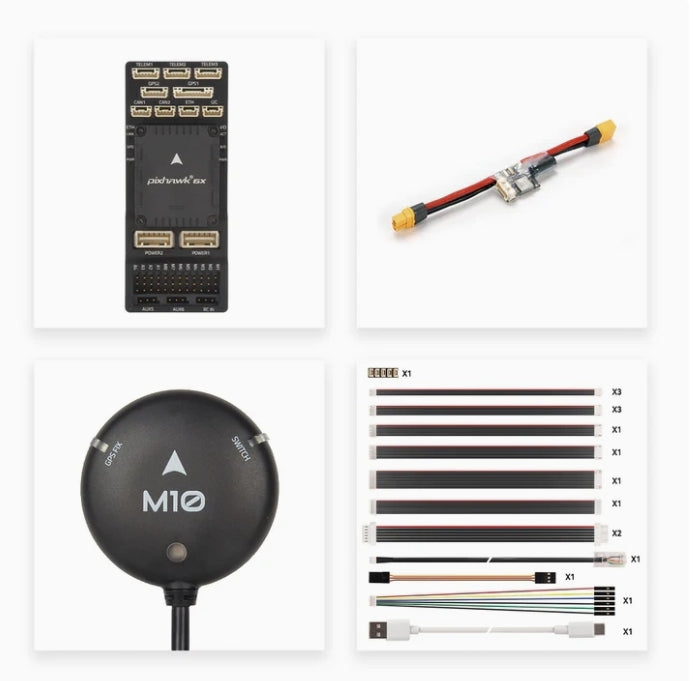
Pixhawk 6X oferuje smuklejszy design z dwoma modelami. Posiada ulepszony złącze pinowe dla lepszej łączności i wydajności, co czyni go idealnym do zaawansowanych zastosowań. Wybierz odpowiedni model dla swoich potrzeb.
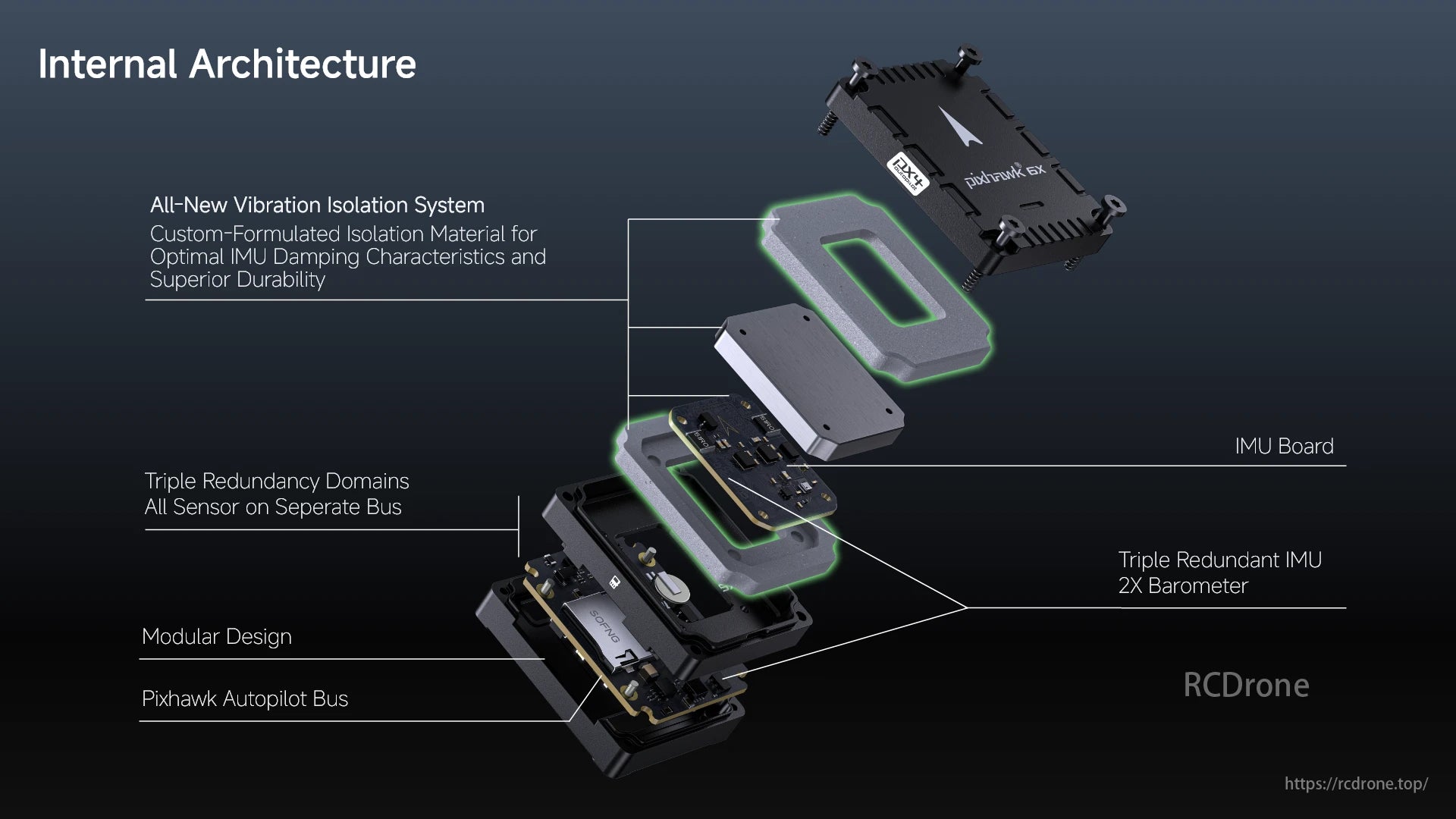
Holybro Pixhawk 6X oferuje izolację wibracji, potrójną redundancję, modułową konstrukcję, magistralę autopilota, płytę IMU oraz 2x barometr dla zaawansowanej wydajności.
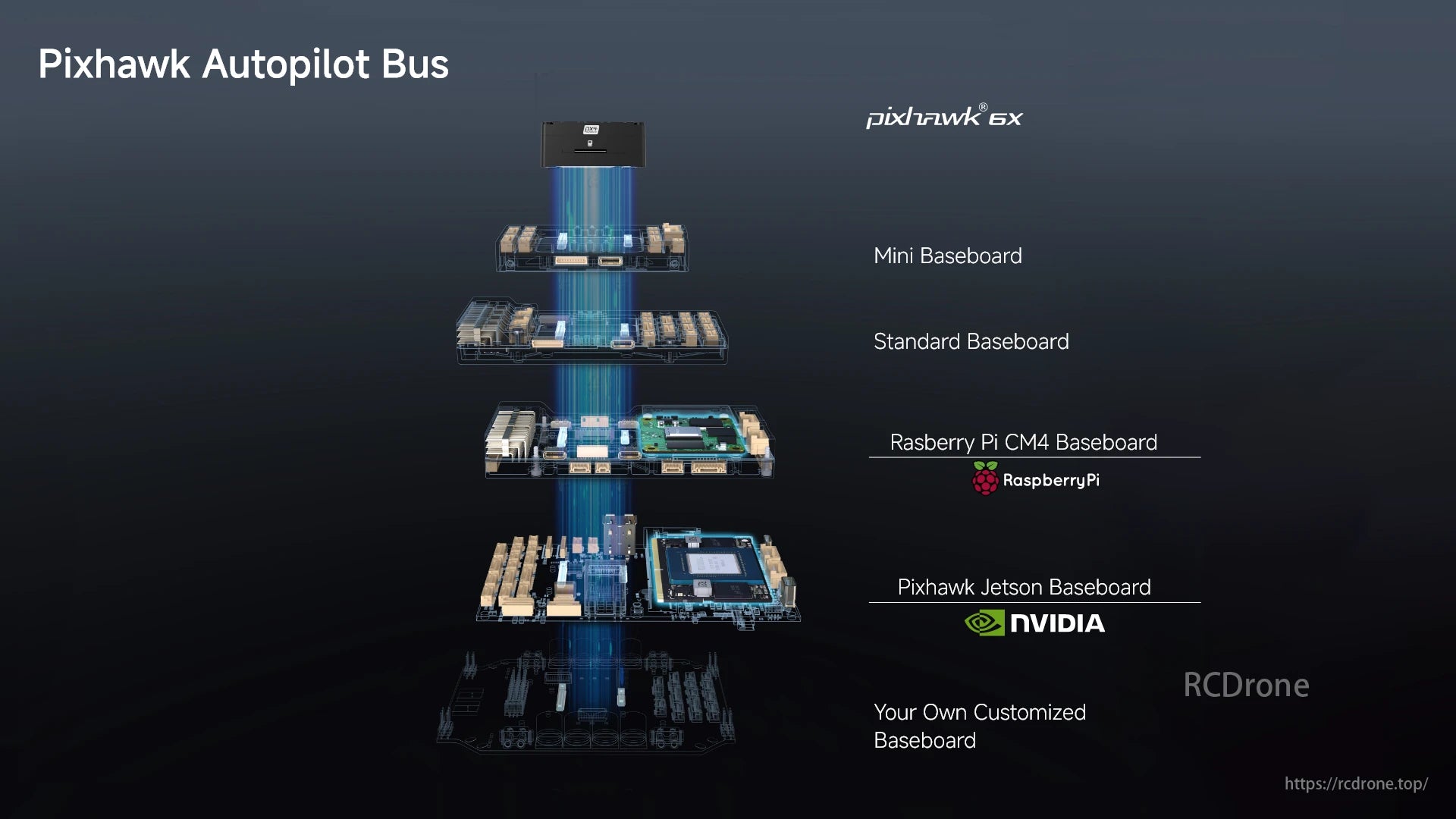
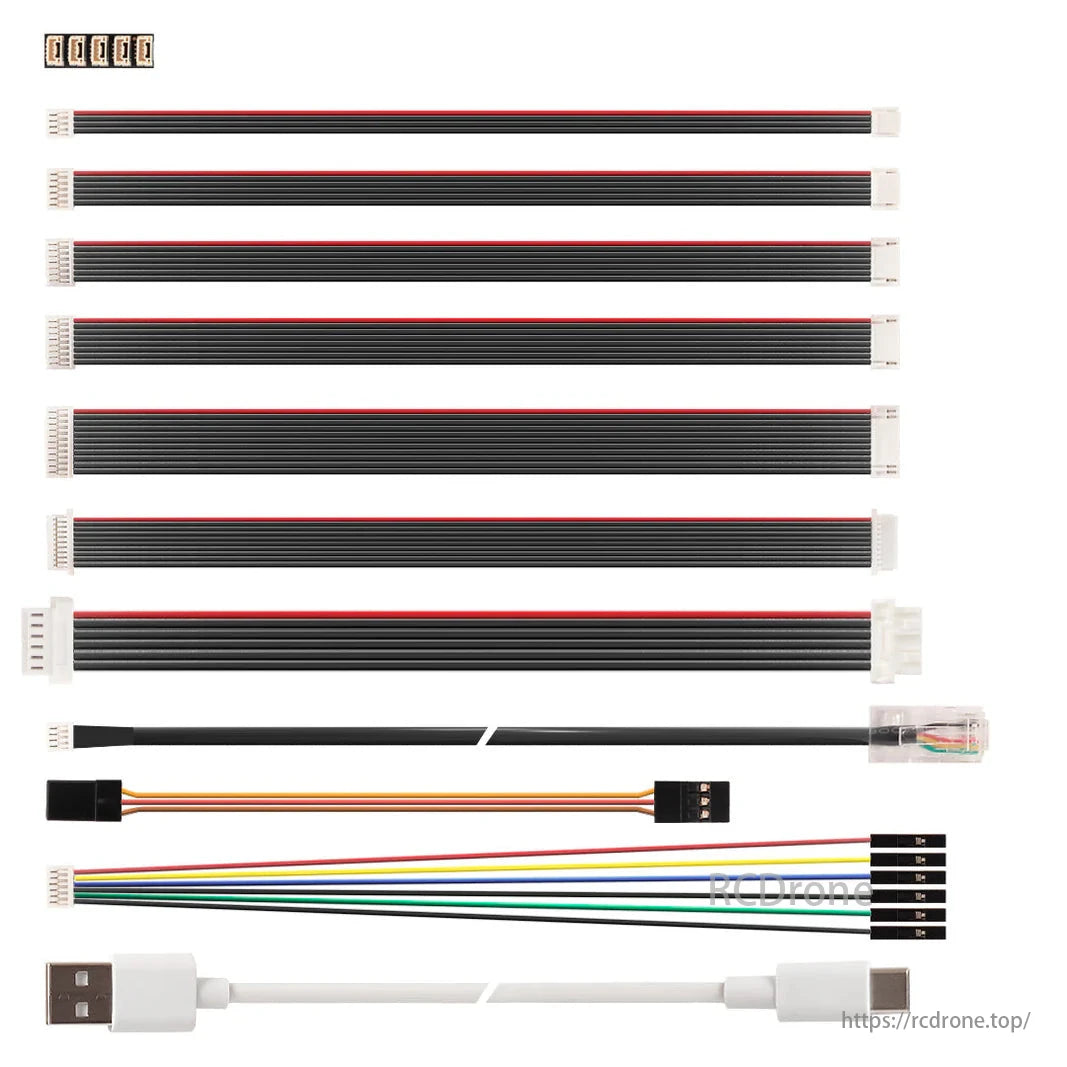
Pixhawk Magistrala Autopilota obejmuje Pixhawk 6X, Mini Płytę Bazową, Standardową Płytę Bazową, Płytę Bazową Raspberry Pi CM4, Płytę Bazową Jetson oraz opcje niestandardowe.

Rezystory kompensacyjne temperatury, redundantny IMU i barometr, różnorodne technologie czujników oraz materiały izolacyjne zapewniają dokładność.

Magistrala Autopilota Pixhawk, procesor STM H753 32-bitowy (480 MHz), Invensense ICM45686 IMU z technologią BalancedGyro oraz element zabezpieczający NXP EdgeLock SE050 są zintegrowane z płytą FMU.
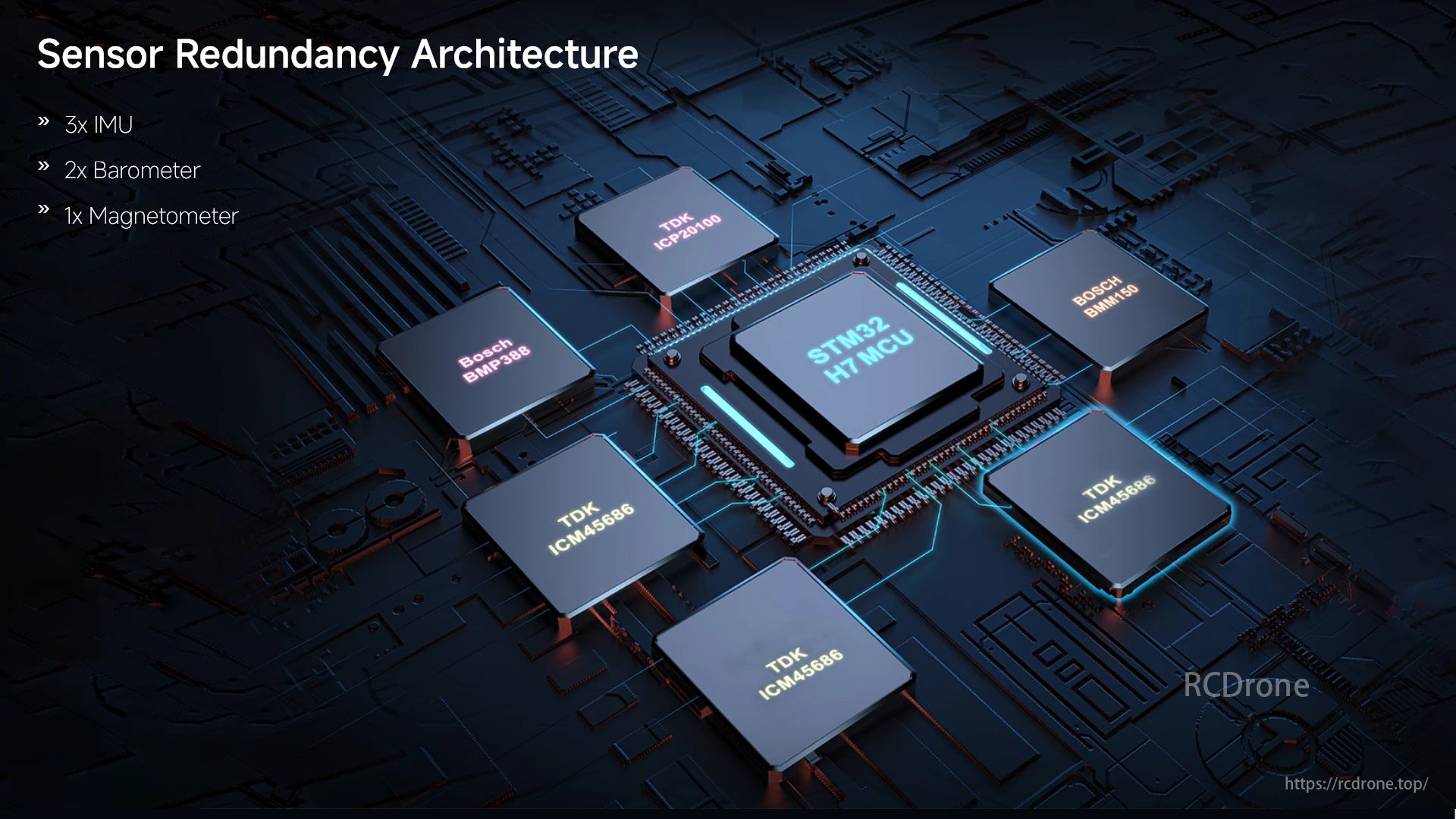
Architektura redundancji czujników z 3x IMU, 2x barometr i 1x magnetometr.Cechy: STM32 H7 MCU, TDK ICM-45686, czujniki Bosch BMP388 i BMM50 dla lepszej wydajności.
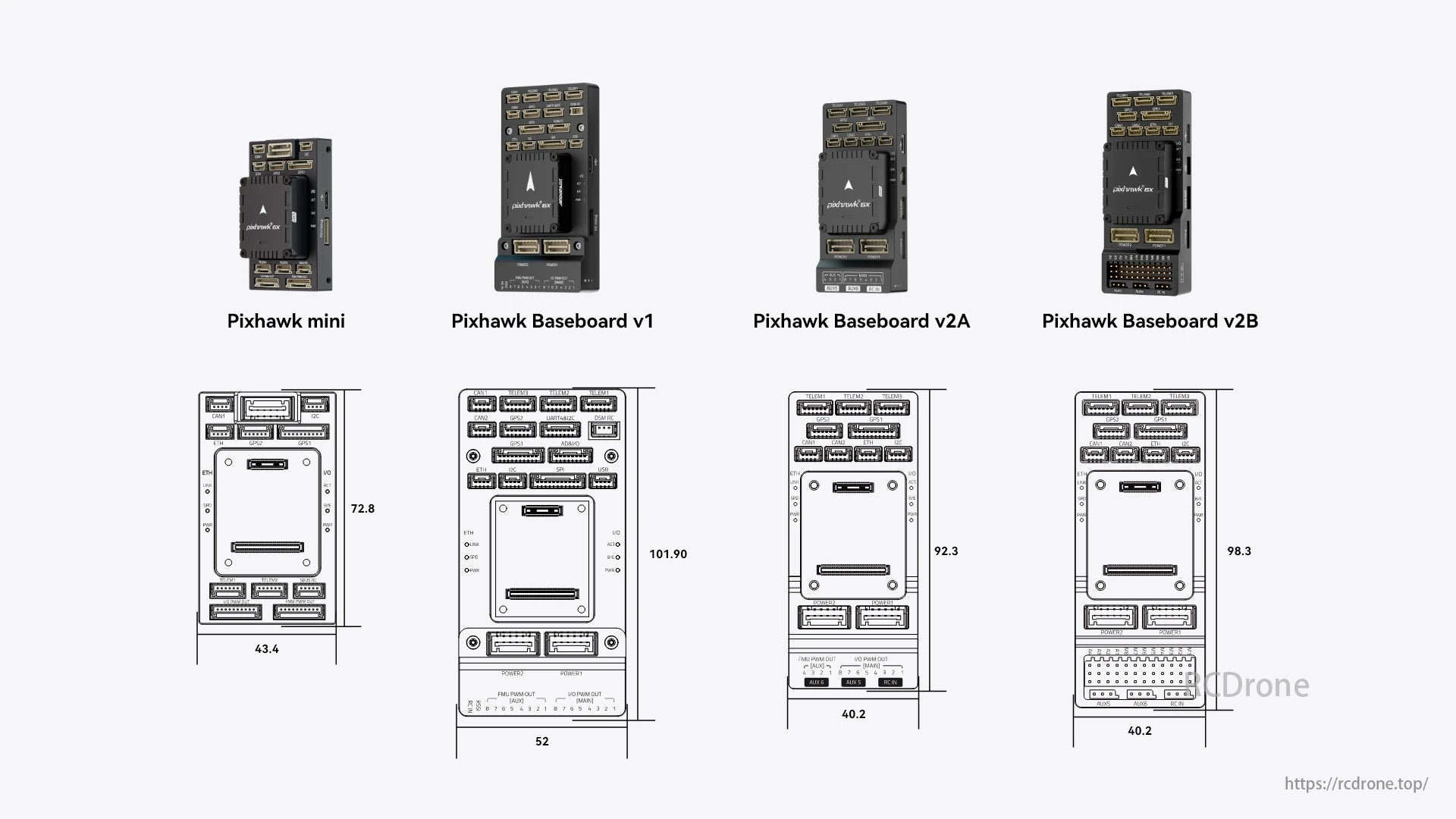
Kontrolery lotu Pixhawk mini, Baseboard v1, v2A i v2B o wymiarach: 43.4x72.8, 52x101.90, 40.2x92.3 i 40.2x98.3 odpowiednio. Różne porty i złącza są widoczne w każdym modelu.
Related Collections