Kontroler lotu Holybro Pixhawk 6X Pro z autopilotem
Kontroler lotu Holybro Pixhawk 6X Pro z autopilotem
HolyBro
Nie można załadować gotowości do odbioru
Kluczowy punkt projektu
- Wysokowydajny przemysłowy moduł IMU ADIS16470 z dużym zakresem dynamiki akcelerometra (±40 g), idealny dla dokładne wykrywanie ruchu w wymagających zastosowaniach UAV
- Zupełnie nowy, zaawansowany, trwały materiał izolujący drgania o częstotliwości rezonansowej w wyższym spektrum, idealny do zastosowań przemysłowych i komercyjnych w dronach
- Potrójnie redundantny IMU i podwójny redundantny barometr na oddzielnych magistralach
- Wysoko wydajny procesor STM32H753
- Modułowy kontroler lotu: oddzielne IMU, FMU i system bazowy
- Konstrukcja uwzględniająca bezpieczeństwo obejmuje czujniki różnych producentów i modeli
- Niezależny układ LDO zasila każdy czujnik, zapewniając niezależną kontrolę mocy.
- Interfejs Ethernet umożliwiający integrację szybkiego komputera misyjnego. Beztransformatorowość można osiągnąć stosując rezystory końcowe 50 Ohm w urządzeniu docelowym (Zakończenie AN2190 50 Ohm).
- Płytka IMU z regulacją temperatury, umożliwiająca optymalną temperaturę pracy IMU
- Przełączany sprzętowo tryb sygnału 3,3 V lub 5 V (wymaga modyfikacji płyty bazowej)
Notatka:
- Aby ten produkt działał, wymagany jest moduł FC + płyta bazowa. Moduł FC lub płyta bazowa same w sobie nie będą działać.
Specyfikacja
Procesory i czujniki
- Procesor FMU: STM32H753
- 32-bitowy Arm® Cortex®-M7, 480 MHz, pamięć flash 2 MB, pamięć RAM 1 MB
- Procesor IO: STM32F103
- 32-bitowy Arm® Cortex®-M3, 72 MHz, 64 KB pamięci SRAM
- Czujniki pokładowe
- Akcelerator/żyroskop: ADIS16470
- ±40g, Izolacja wibracji, przemysłowy IMU
- Akcelerator/żyroskop: IIM-42652
- ±16g, Izolacja wibracji, przemysłowy IMU
- Akcelerator/żyroskop: ICM-45686 z technologią BalancedGyro™
- ±32g, Mocowanie twarde
- Barometr: ICP20100
- Barometr: BMP388
- Magazyn: BMM150
- Akcelerator/żyroskop: ADIS16470
- NXP EdgeLock SE050 Element zabezpieczający sprzęt Plug & Trust
Dane elektryczne
- Napięcie znamionowe:
- Maksymalne napięcie wejściowe: 6V
- Wejście zasilania USB: 4,75~5,25 V
- Wejście szyny serwa: 0~36V
- Aktualne oceny:
- Ogranicznik prądu wyjściowego Telem1: 1,5 A
- Ogranicznik prądu wyjściowego wszystkich pozostałych portów: 1,5 A
- Temperatura pracy: -25-85°C
Dane mechaniczne
- Wymiary
- Moduł kontrolera lotu: 38,8 x 31,8 x 30,1 mm
- Standardowa listwa przypodłogowa: 52,4 x 102 x 16,7 mm (Aluminium)
- Mini listwa przypodłogowa: 43,4 x 72,8 x 14,2 mm
- Waga
- Moduł kontrolera lotu: 50g
- Standardowa listwa przypodłogowa: 72,5 g (Aluminium)
- Mini listwa przypodłogowa: 26.5g
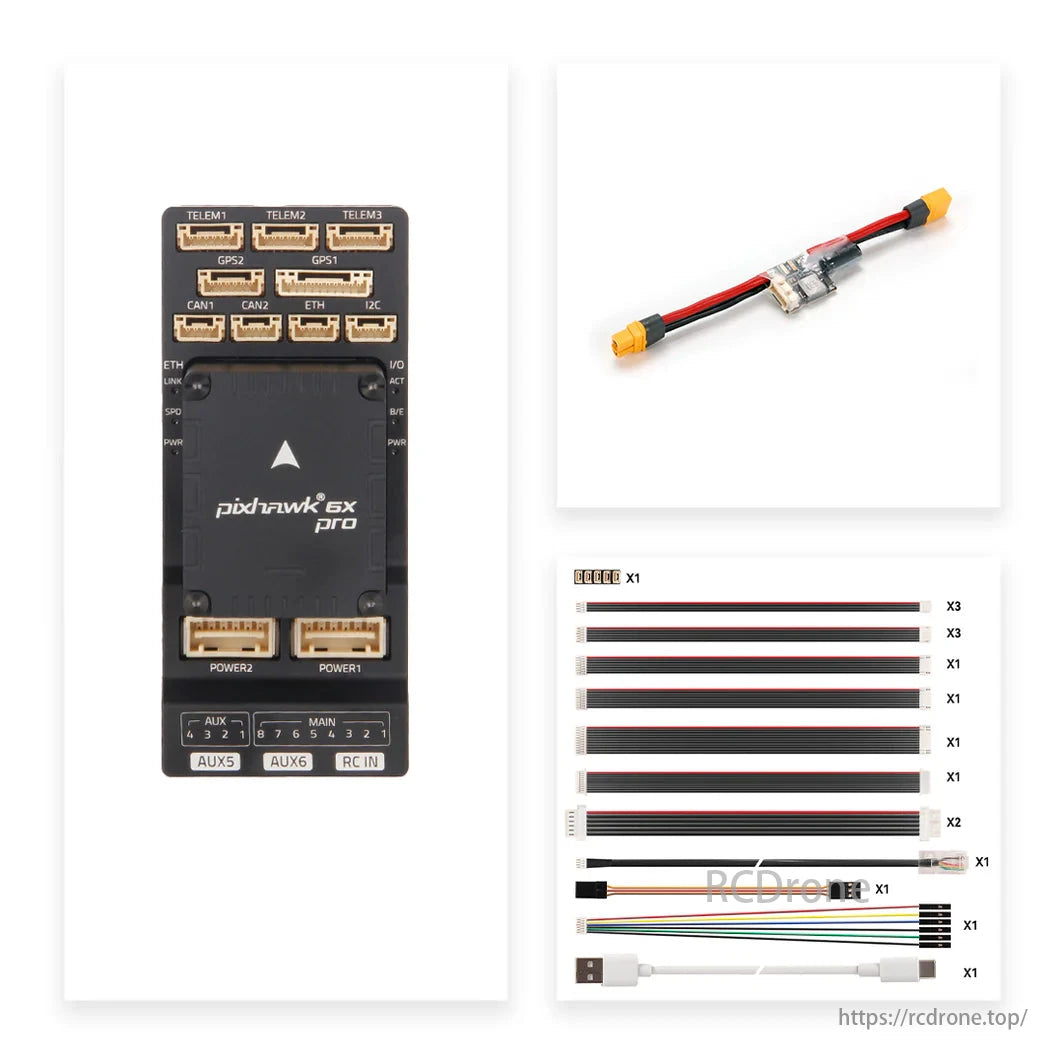
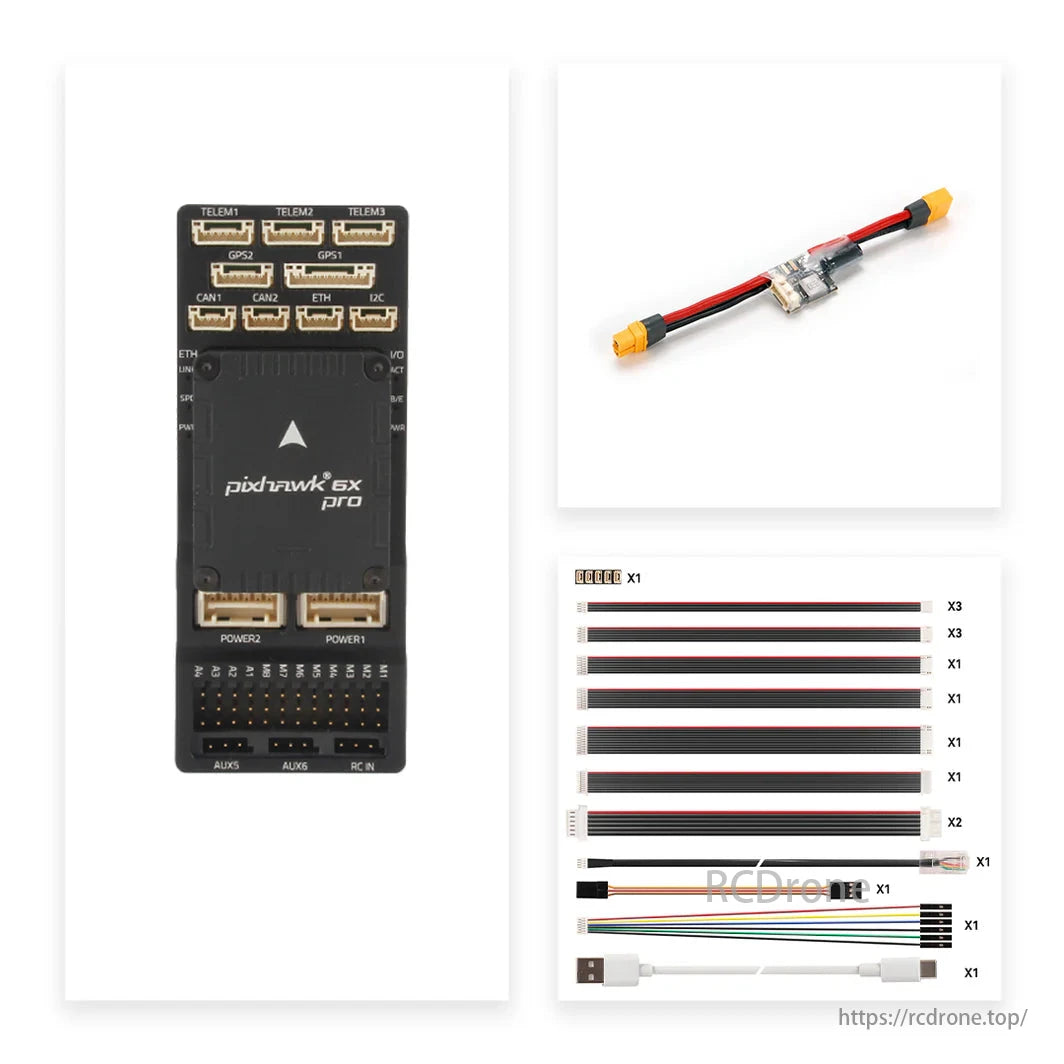
Zawartość pakietu
Moduł FC zawiera tylko:
- Jastrząb Moduł kontrolera lotu 6X Pro
- Opcjonalna wymiana tłumienia IMU (bardziej miękka niż fabrycznie zamontowana)
Standardowy zestaw V2A/V2B/Mini zawiera:
- Moduł kontrolera lotu Pixhawk 6X Pro
- Listwa przypodłogowa Pixhawk Standard v2A/ Listwa przypodłogowa Pixhawk Standard v2B/ Miniaturowa listwa przypodłogowa
- Moduł mocy wysokiego napięcia PM02D
- Zestaw kabli
Bliższe dane
Całkowicie nowa konstrukcja izolacji drgań
Ta nowa konstrukcja izolacji wibracji wykorzystuje prąd przemiennyopracowany przez Ustom trwały materiał izolacyjny na bazie silikonu zamiast tradycyjnej pianki. Bpotwierdzony szeroko zakrojonymi pracami badawczo-rozwojowymi i testami, oferuje optymalne właściwości tłumienia IMU z częstotliwością rezonansową w wyższym spektrum, co czyni go idealnym do zastosowań przemysłowych i komercyjnych dronów
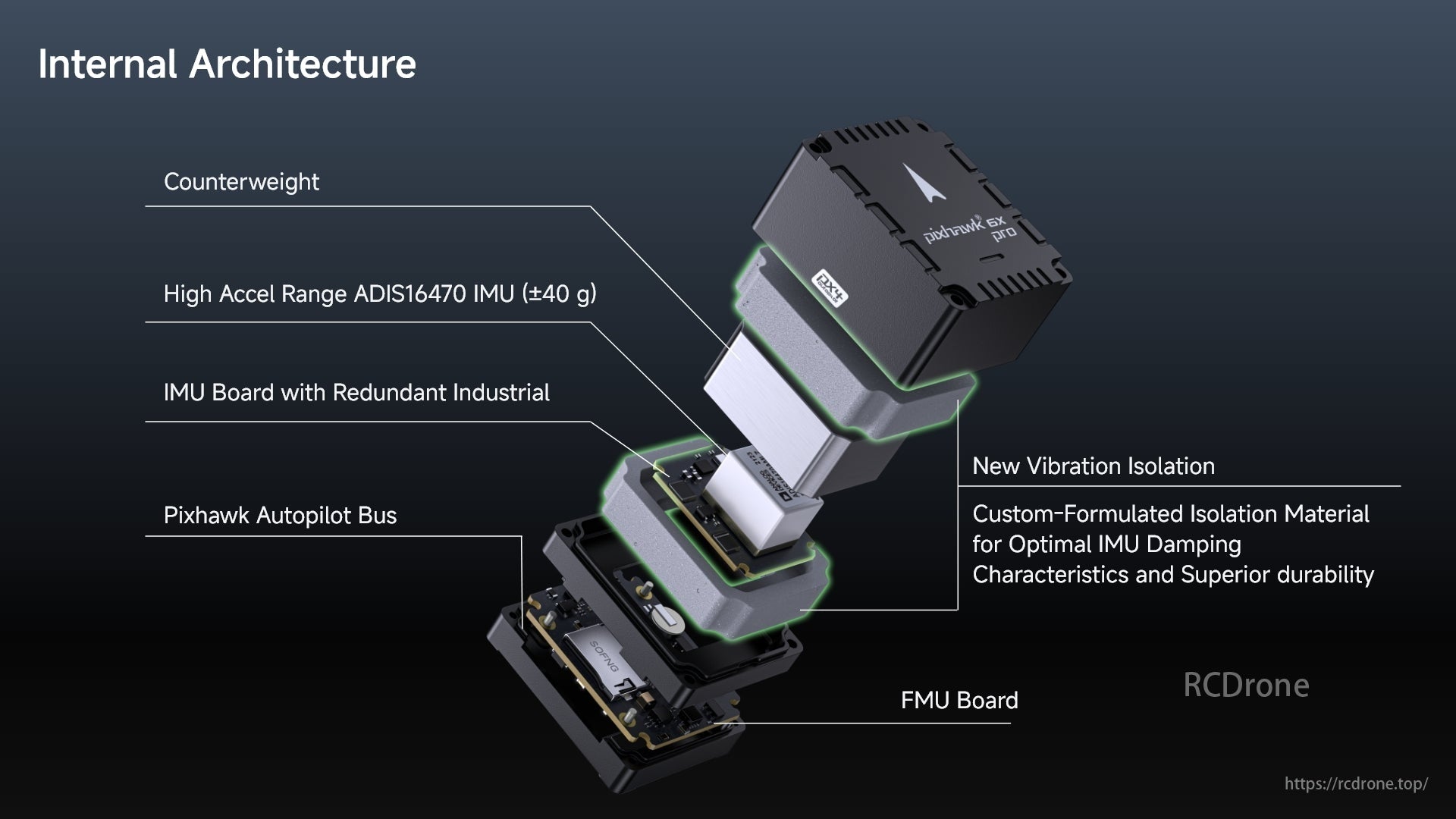
Architektura wewnętrzna: przeciwwaga, moduł IMU ADIS16470 o dużym zakresie przyspieszenia (±40 g), nadmiarowa płyta przemysłowa IMU, magistrala autopilota Pixhawk, nowa izolacja wibracji, płyta FMU.
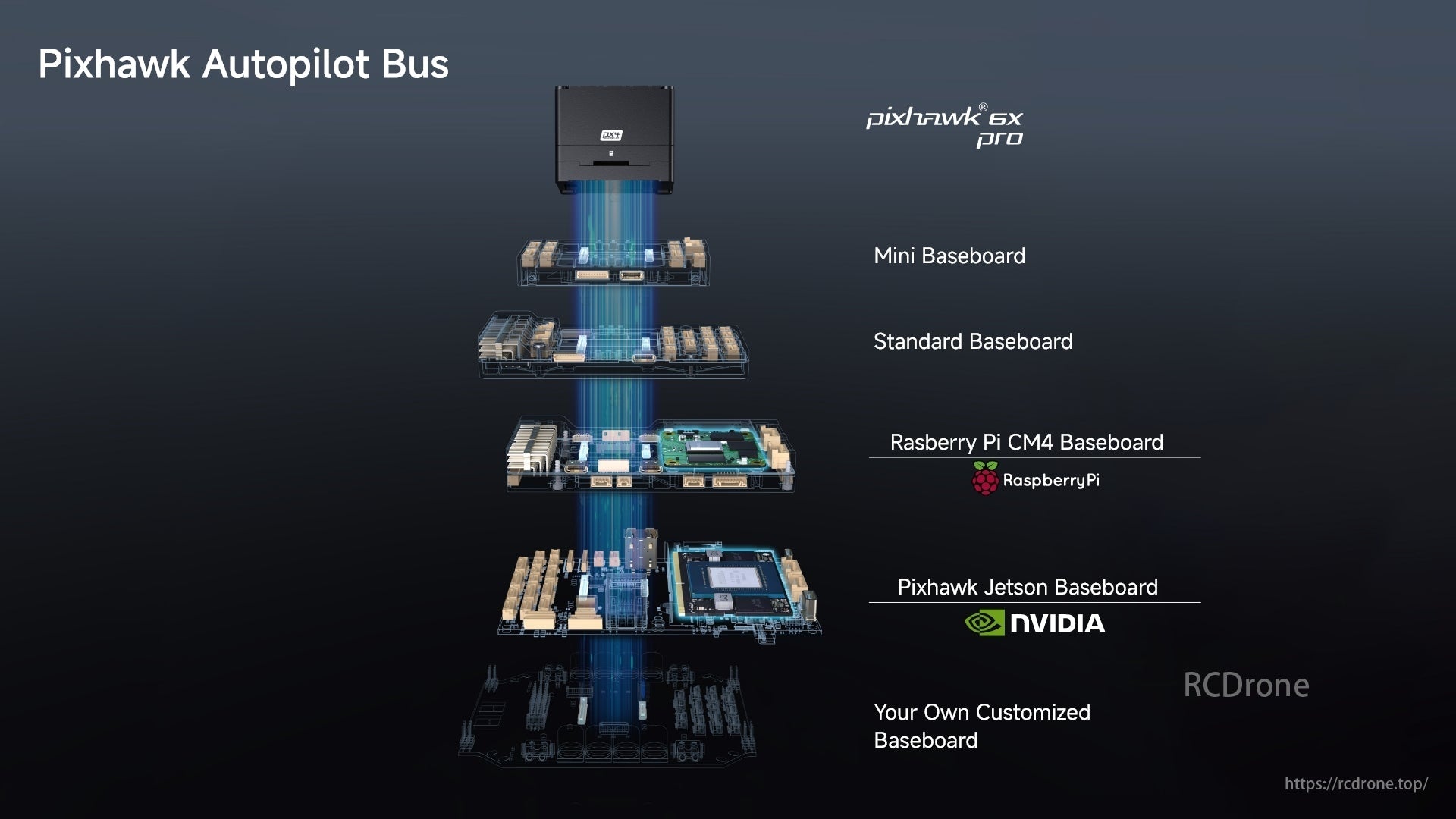
Magistrala Autopilot Pixhawk łączy płyty bazowe Mini, Standard, Raspberry Pi CM4, Jetson Baseboards oraz niestandardowe płyty bazowe.
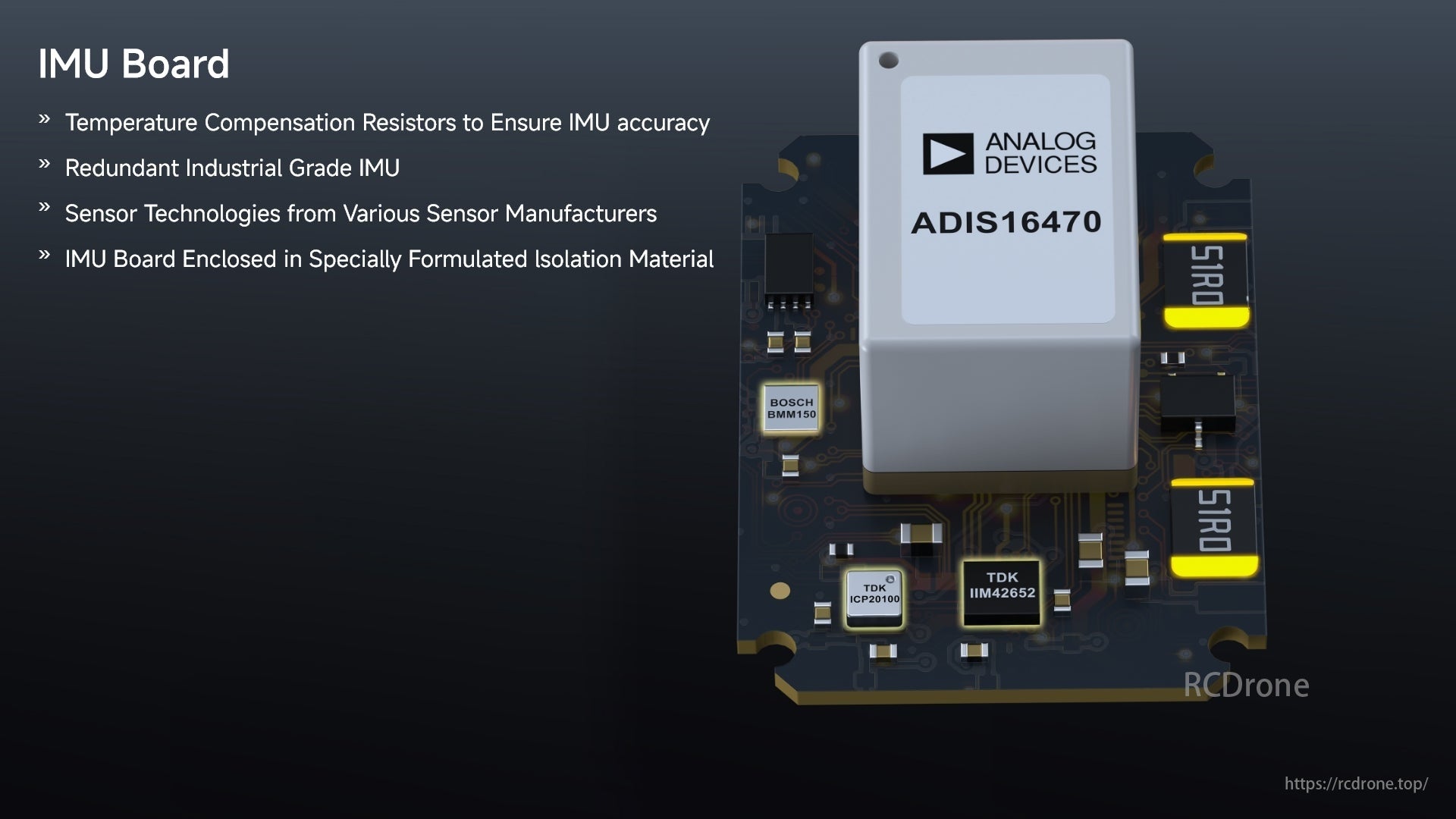
Płytka IMU zawiera rezystory kompensujące temperaturę, redundantny IMU klasy przemysłowej, czujniki różnych producentów i jest umieszczona w materiale izolacyjnym.
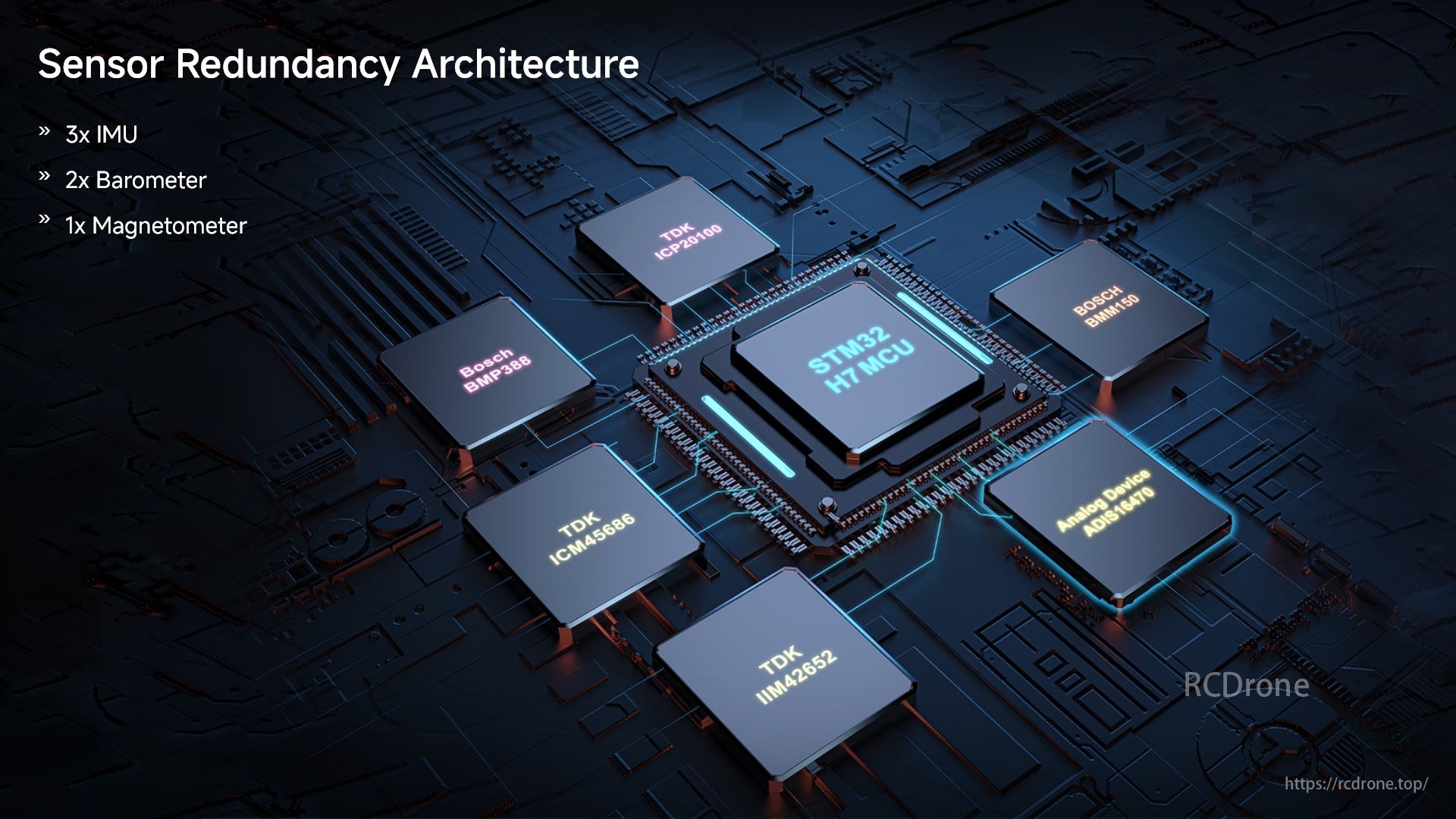
Architektura nadmiarowości czujników obejmuje 3x IMU, 2x barometr i 1x magnetometr, a jej komponenty to m.in. mikrokontroler STM32 H7, układy scalone TDK, Bosch BMP388 i Analog Devices ADIS16470.
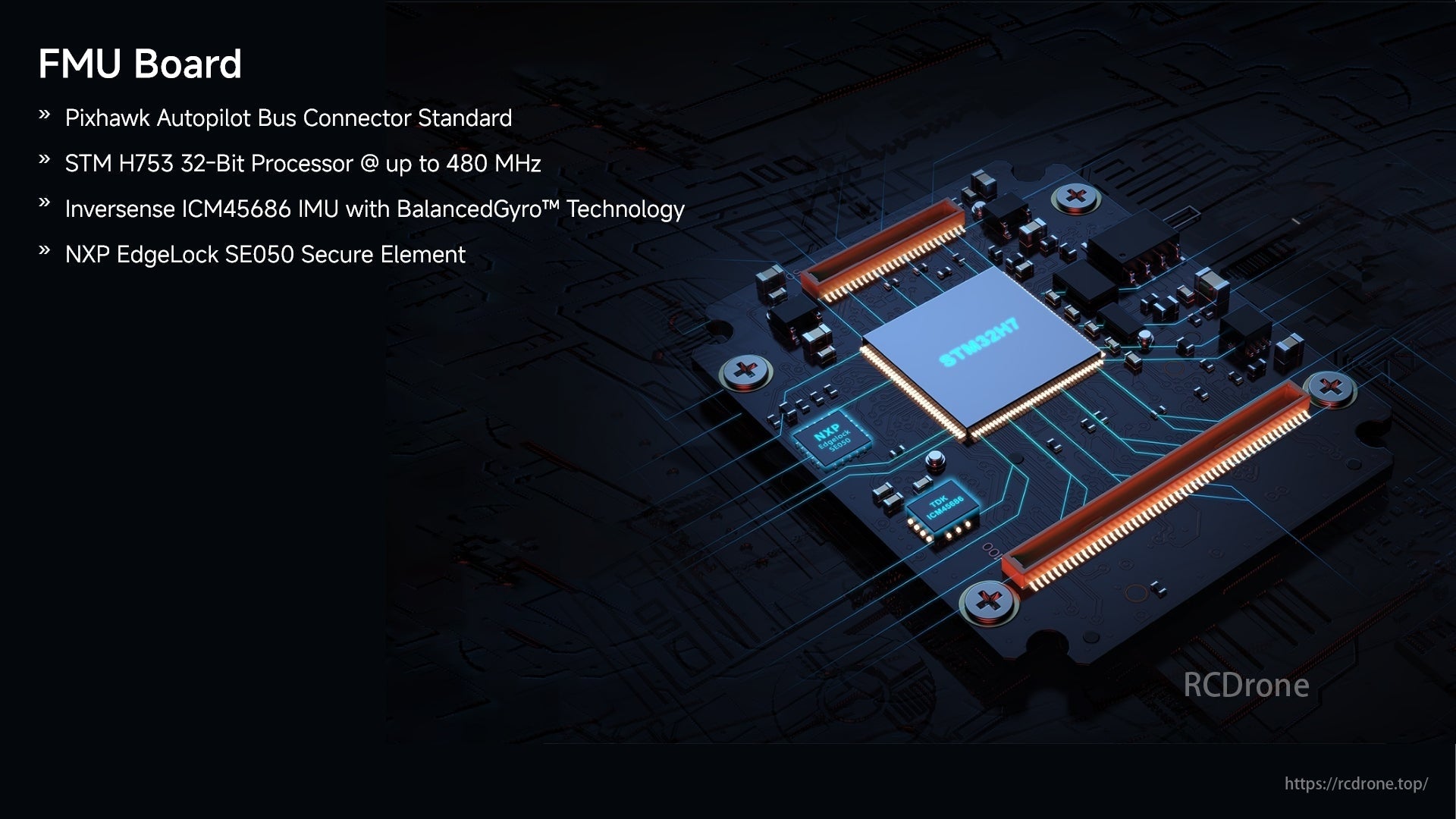
Płytka FMU zawiera standardowe złącze magistrali autopilota Pixhawk, 32-bitowy procesor STM H753 do 480 MHz, moduł IMU Inversense ICM45686 z technologią BalancedGyro i bezpieczny element NXP EdgeLock SE050.
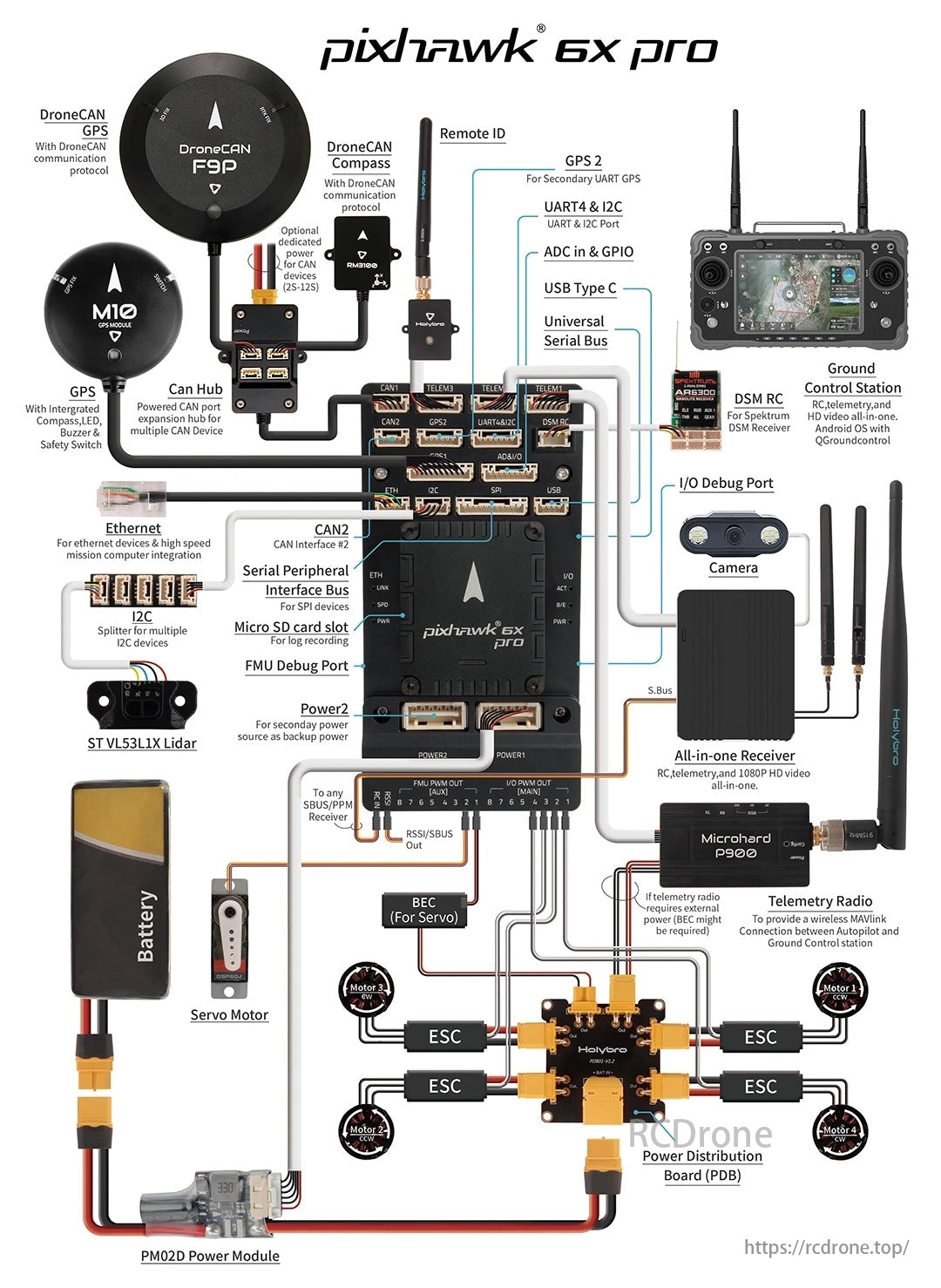
Schemat Pixhawk 6X Pro ilustruje połączenia dla systemu autopilota drona, w tym modułów GPS, kompasu, naziemnej stacji kontrolnej, kamery, radia telemetrycznego, ESC, silników i płyty rozdzielczej zasilania. Do komunikacji między komponentami używane są różne interfejsy, takie jak CAN, I2C, UART i USB.
Related Collections