Holybro Pixhawk 6X-RT - (edycja deweloperska) Kontroler lotu autopilota Standard/Mini
Holybro Pixhawk 6X-RT - (edycja deweloperska) Kontroler lotu autopilota Standard/Mini
HolyBro
Nie można załadować gotowości do odbioru
Przegląd
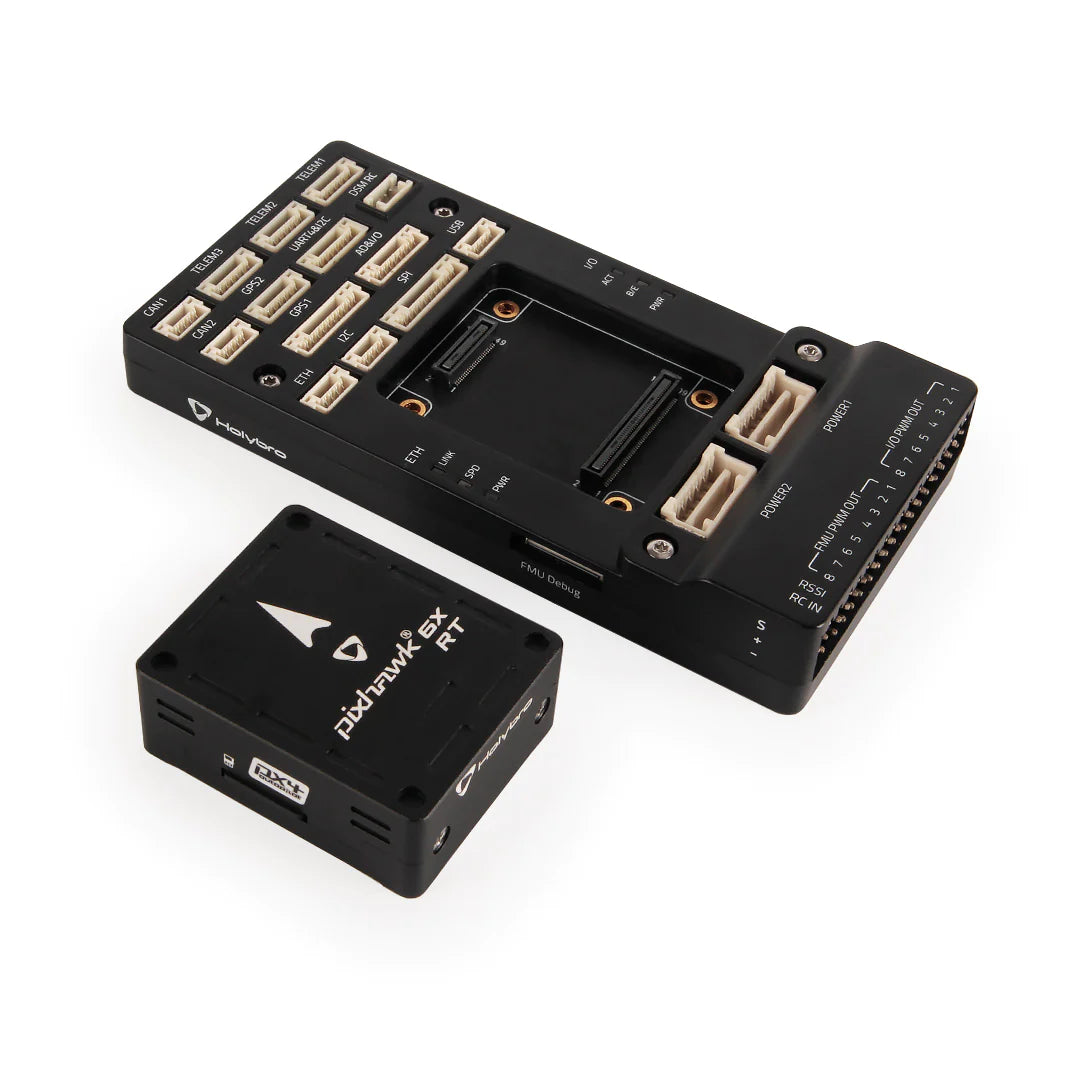
Pixhawk 6X-RT jest oparty na otwartym standardzie Pixhawk® FMUv6X-RT i standardzie magistrali autopilota Pixhawk®. Jest wyposażony w preinstalowany autopilot PX4. Wewnątrz kontrolera lotu Pixhawk 6X-RT można znaleźć oparty na NXP kontroler i.MCU MXRT1176 w połączeniu z technologią czujników firm Bosch® i InvenSense® zapewnia elastyczność i niezawodność w sterowaniu dowolnym pojazdem autonomicznym.
I.Mikrokontroler MXRT1176 zawiera procesor Arm® Cortex-M7 o częstotliwości 1 GHz i Cortex-M4 o częstotliwości 400 MHz. Posiada 2MB SRAM i 64MB Octal SPI Flash. Dzięki zaktualizowanej mocy obliczeniowej programiści mogą pracować bardziej produktywnie i wydajnie, umożliwiając tworzenie złożonych algorytmów i modeli.
Zawiera wysokowydajne, ciche IMU zaprojektowane z myślą o lepszej stabilizacji, a także posiada potrójnie redundantne IMU i podwójnie redundantne barometry na oddzielnych magistralach. Gdy autopilot wykryje awarię czujnika, system płynnie przełącza się na inny, aby zachować niezawodność sterowania lotem. Niezależny LDO zasila każdy zestaw czujników z niezależną regulacją mocy. System izolacji wibracji filtrujący wibracje o wysokiej częstotliwości i redukujący hałas, aby zapewnić dokładne odczyty, umożliwiając pojazdom osiągnięcie lepszych ogólnych osiągów w locie. Zintegrowana technologia Microchip Ethernet PHY umożliwia teraz szybką komunikację z komputerami misji za pośrednictwem sieci Ethernet.
Pixhawk 6X-RT jest idealny dla programistów w korporacyjnych laboratoriach badawczych, start-upach, pracownikach akademickich (badacze, profesorowie, studenci) i zastosowaniach komercyjnych. Ten kontroler lotu jest kompatybilny z dowolną płytą bazową korzystającą z magistrali Pixhawk Autopilot, taką jak Pixhawk Baseboard, Pixhawk Mini Baseboard i Pixhawk RPi CM4 Baseboard.
Kluczowe punkty projektu
- Wysokowydajny dwurdzeniowy, tj.Procesor MXRT1176 z Cortex-M7 @ 1 GHz – Cortex-M4 @ 400 MHz
- Modułowy kontroler lotu: oddzielny system IMU, FMU i Base połączony 100-pinowym i 50-pinowym złączem magistrali autopilota Pixhawk®.
- Redundancja: 3 czujniki IMU i 2 czujniki barometru na oddzielnych magistralach
- Domeny potrójnej redundancji: Całkowicie izolowane domeny czujników z oddzielnymi magistralami i oddzielną kontrolą mocy
- System izolacji drgań filtrujący wibracje o wysokiej częstotliwości i redukujący hałas, aby zapewnić dokładne odczyty
- Interfejs Ethernet umożliwiający szybką integrację komputera misyjnego
- IMU są kontrolowane temperaturowo za pomocą wbudowanych rezystorów grzejnych, co pozwala na optymalną temperaturę roboczą IMU
- Sprzętowy element bezpieczny NXP EdgeLock SE051 rozszerzenie powszechnie zaufanej rodziny bezpiecznych elementów EdgeLock SE050 Plug & Trust, obsługuje aktualizacje apletów w terenie i zapewnia sprawdzone bezpieczeństwo, certyfikowane zgodnie z CC EAL 6+, z AVA_VAN.5 aż do poziomu systemu operacyjnego, zapewniając silną ochronę przed najnowszymi scenariuszami ataków. mig, aby bezpiecznie przechowywać identyfikator operatora
Uwaga:
- Ta edycja dla programistów dla pierwszych użytkowników, podczas gdy my nadal gromadzimy godziny testów w locie
- Ten kontroler lotu jest obecnie obsługiwany tylko w stosie lotu PX4. (Docelowe oprogramowanie sprzętowe: FMUv6xrt). Nie jest obsługiwany przez Ardupilot.
- Ten kontroler lotu wykorzystuje cyfrowy moduł zasilania (taki sam jak Pixhawk 6X, pełną listę można znaleźć tutaj) Tabela porównawcza modułów zasilania
Specyfikacja
-
MCU: tj.MXRT1176
-
Kora-M7 przy 1 GHz
-
Kortex-M4 przy 400 MHz
-
2MB pamięci SRAM
-
64MB ósemkowej pamięci Flash SPI
-
Procesor IO: STM32F103
-
32-bitowy Arm® Cortex®-M3, 72 MHz, 64 KB SRAM
-
Czujniki pokładowe
-
Przyspieszenie/żyroskop: BMI088
-
Przyspieszenie/żyroskop: ICM-42670-P
-
Przyspieszenie/żyroskop: ICM-42686-P
-
Magazyn: BMM150
-
Barometr: 2x BMP388
- Bezpieczny element sprzętowy
- NXP EdgeLock SE051C2
- Interfejs SDHC
- 12-kanałowy PWM
- 8x UART
- 4x I2C
- 6x SPI
- 3x CAN-FD
- RMII 100M Ethernet
- USB
- Włączanie oprogramowania typu open source
- Autopilot PX4
- NuttX RTOS
- zephyr RTOS
Zestaw standardowy SKU20257/zestaw mini SKU258 zawiera:
-
Moduł kontrolera lotu Pixhawk 6X-RT
-
Podstawa standardowa Pixhawk /Podstawa Pixhawk Mini
- Moduł zasilania wysokiego napięcia PM02D
-
Zestaw kabli
Link referencyjny:
- Instrukcja flashowania oprogramowania sprzętowego (Github)
- PX4 na MCU NXP IMXRT1176 1 GHz - Slajdy prezentacji autorstwa NXP
- tj.MX RT1176 – strona produktu Mikrokontroler typu crossover 1 GHz z rdzeniami Arm® Cortex®
- EdgeLock® SE051: sprawdzone, łatwe w użyciu rozwiązanie zabezpieczające IoT z obsługą aktualizacji i niestandardowymi apletami
Related Collections