Zestaw płyty bazowej Holybro Pixhawk Jetson z 6X / 6X Pro i NVIDIA Jetson
Zestaw płyty bazowej Holybro Pixhawk Jetson z 6X / 6X Pro i NVIDIA Jetson
HolyBro
Nie można załadować gotowości do odbioru
Przegląd
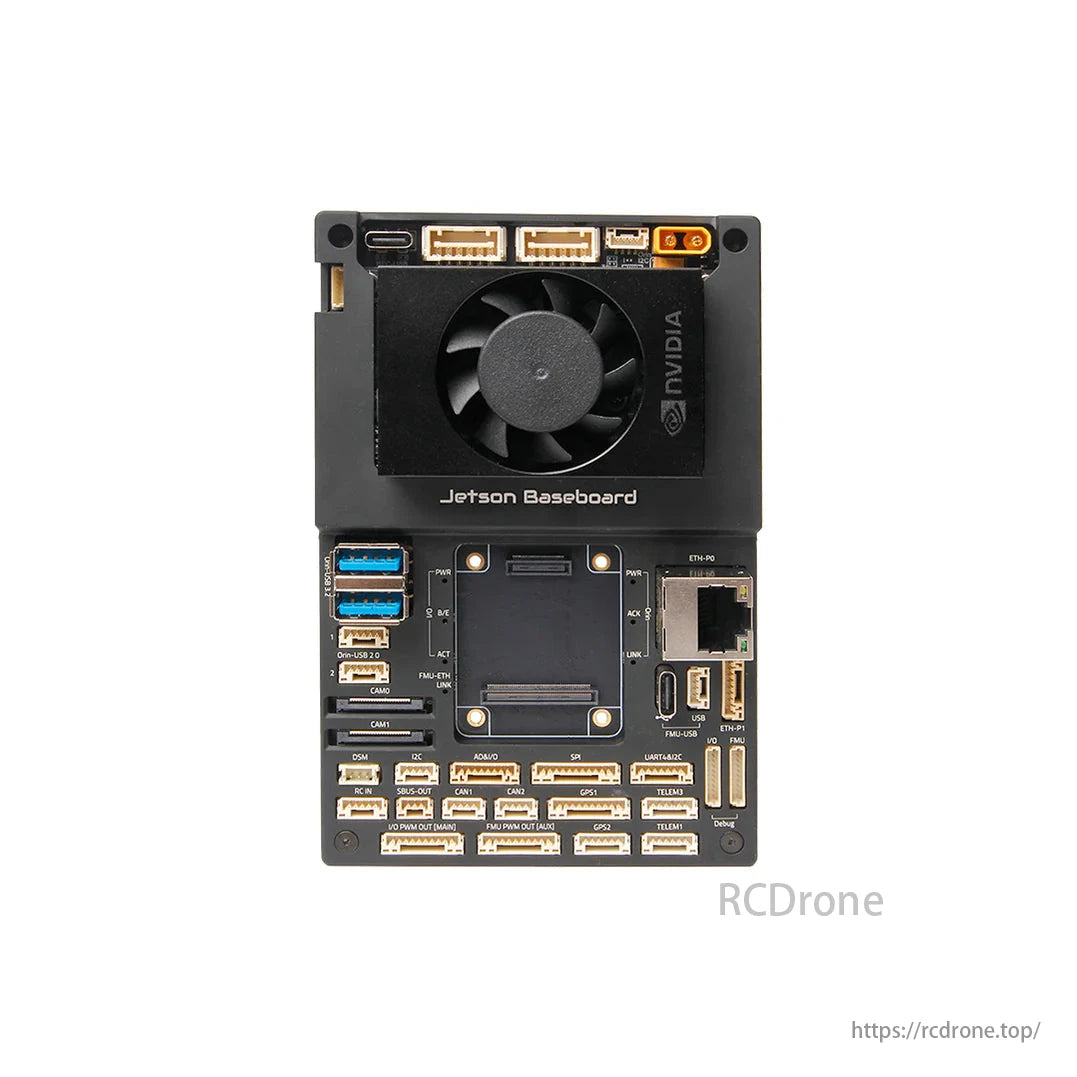
Ten Listwa przypodłogowa Holybro Pixhawk Jetson jest zaprojektowany na podstawie Specyfikacja open source Pixhawk Autopilot Bus (PAB) i płynnie integruje się z Płyta nośna NVIDIA Jetson Orin NX/Nano. Ten Współczynnik kształtu PAB umożliwia kompatybilność z dowolnym kontrolerem lotu PAB, w tym Pixhawk 6X. Ta płyta łączy w sobie moc obliczeniową NVIDIA Jetson z możliwością sterowania lotem Jastrząb, co czyni go idealnym rozwiązaniem dla zaawansowanych zastosowań autonomicznych.
Główne cechy
-
Zunifikowany system: Łączy Jastrząb I NVIDIA Jetson na jednej desce.
-
Bezproblemowa łączność: Jetson i Pixhawk komunikują się za pośrednictwem Przełącznik UART, CAN i Ethernet.
-
Szeroka kompatybilność: Wspiera Jetson Orin NX i Orin Nano.
-
Szybka rozbudowa: Cechy 2 gniazda na klucze M.2 dla WiFi/Bluetooth i dysków SSD NVMe.
-
Integracja z Pixhawk 6X: Wyposażony w Czujniki ICM-45686 w celu lepszej kontroli lotu.
Procesory i czujniki
Procesor FMU:
-
STM32H753
-
32-bitowy ARM Cortex-M7, 480MHz
-
Pamięć Flash 2MB, RAM 1MB
Procesor IO:
-
STM32F103
-
32-bitowy ARM Cortex-M3, 72MHz
-
Pamięć SRAM 64 KB
Czujniki pokładowe (Rev8)
-
Akcelerometr/żyroskop: 3x ICM-45686 (z technologią BalancedGyro™)
-
Barometr: ICP20100 i BMP388
-
Magnetometr: BMM150
Porty i łączność na płycie głównej
Złącza Jetson
-
2 porty Gigabit Ethernet (Połączono z Jetsonem i Autopilotem za pośrednictwem Przełącznik Ethernet RTL8367S)
-
2 wejścia kamery MIPI CSI (4 pasy każdy, 22-stykowa kamera Raspberry Pi FFC)
-
2 porty hosta USB 3.0 (USB-A, limit prądu 5A)
-
2x USB 2.0 portów hosta (5-stykowe złącze JST-GH)
-
USB 2.0 do debugowania (USB-C)
-
Wyjście mini HDMI
-
2 gniazda M.2:
-
Klucz M (2242) dla dysku SSD NVMe (PCIEx4)
-
Klucz E (2230) dla WiFi/BT (PCIEx2, UART, USB, I2S)
-
-
Port CAN (Połączono z Autopilot CAN2, 4-stykowe złącze JST-GH)
-
Porty SPI, I2C, I2S, UART (Różne złącza JST-GH)
-
Port zasilania wentylatora
-
Pobór mocy: Złącze XT30, 7-21 V (3S-4S)
-
UBEC 12A (3-14S) Zalecany do zastosowań >4S
Złącza autopilota
-
Interfejs magistrali autopilota Pixhawk: 100-stykowe i 50-stykowe Hirose DF40
-
Nadmiarowe wejścia modułu zasilania cyfrowego
-
Obsługa monitora zasilania I2C
-
Porty GPS i przełączników bezpieczeństwa: 10-stykowe i 6-stykowe JST-GH
-
2x porty CAN (4-stykowe JST-GH)
-
3 porty telemetryczne (JST-GH, jeden podłączony do UART1 Jetson)
-
16 wyjść PWM (2x 10-stykowe JST-GH)
-
USB 2.0 (USB-C i 4-stykowe JST-GH)
-
Wejście DSM (3-stykowe złącze JST-ZH, rozstaw 1,5 mm)
-
Wejście RC (PPM/SBUS, 5-stykowe JST-GH)
-
Port SPI dla magistrali czujników zewnętrznych (SPI5, 11-stykowy JST-GH)
-
2x porty debugowania (FMU i IO, 10-stykowe JST-SH)
Wymagania dotyczące zasilania
-
Napięcie wejściowe: 7-21V (3S-4S) przez złącze XT30
-
Minimalne wymagania dotyczące zasilania: 8 V/3 A (różni się w zależności od urządzeń peryferyjnych)
-
Obsługuje zewnętrzny UBEC 12A (3-14S) w celu zapewnienia redundancji i zastosowań o wyższym napięciu
-
Wbudowana ochrona przeciwprzepięciowa
Wymiary i waga
-
Rozmiar deski: 126x80x38mm (bez Jetson i kontrolera lotu)
-
Waga: 203.2g (w tym Jetson, radiator, kontroler lotu, dysk SSD, moduł Wi-Fi)
Specyfikacje UBEC-12A
-
Napięcie wejściowe: 3~14S (XT30)
-
Napięcie wyjściowe: 6,0 V/7,2 V/8,0 V/9,2 V (Zalecane dla Jetson 7,2 V)
-
Ciągły prąd wyjściowy: 12A
-
Prąd wyjściowy impulsowy: 24A
-
Rozmiar: Wymiary: 48 x 33,6 x 16,3 mm
-
Waga: 47,8 g
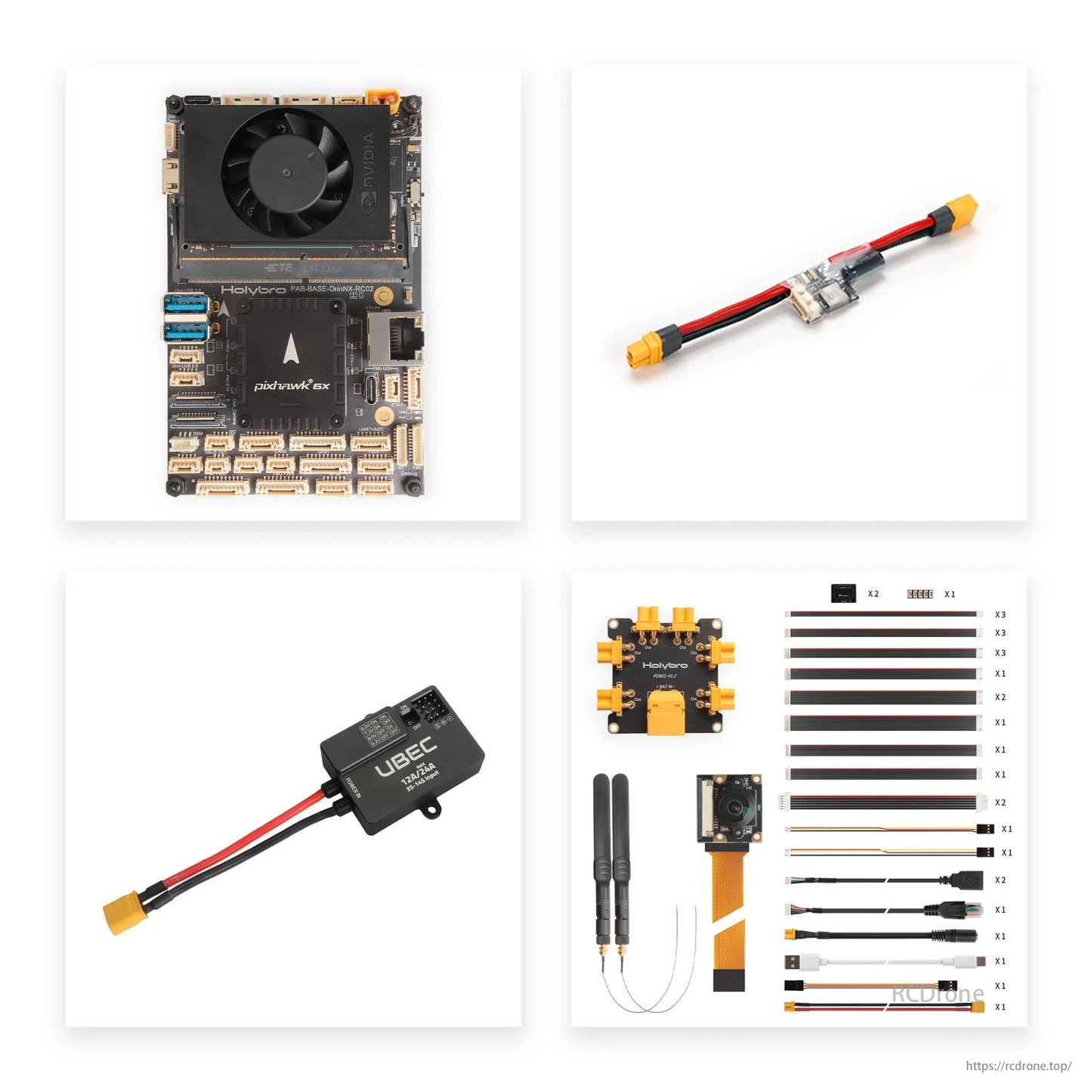
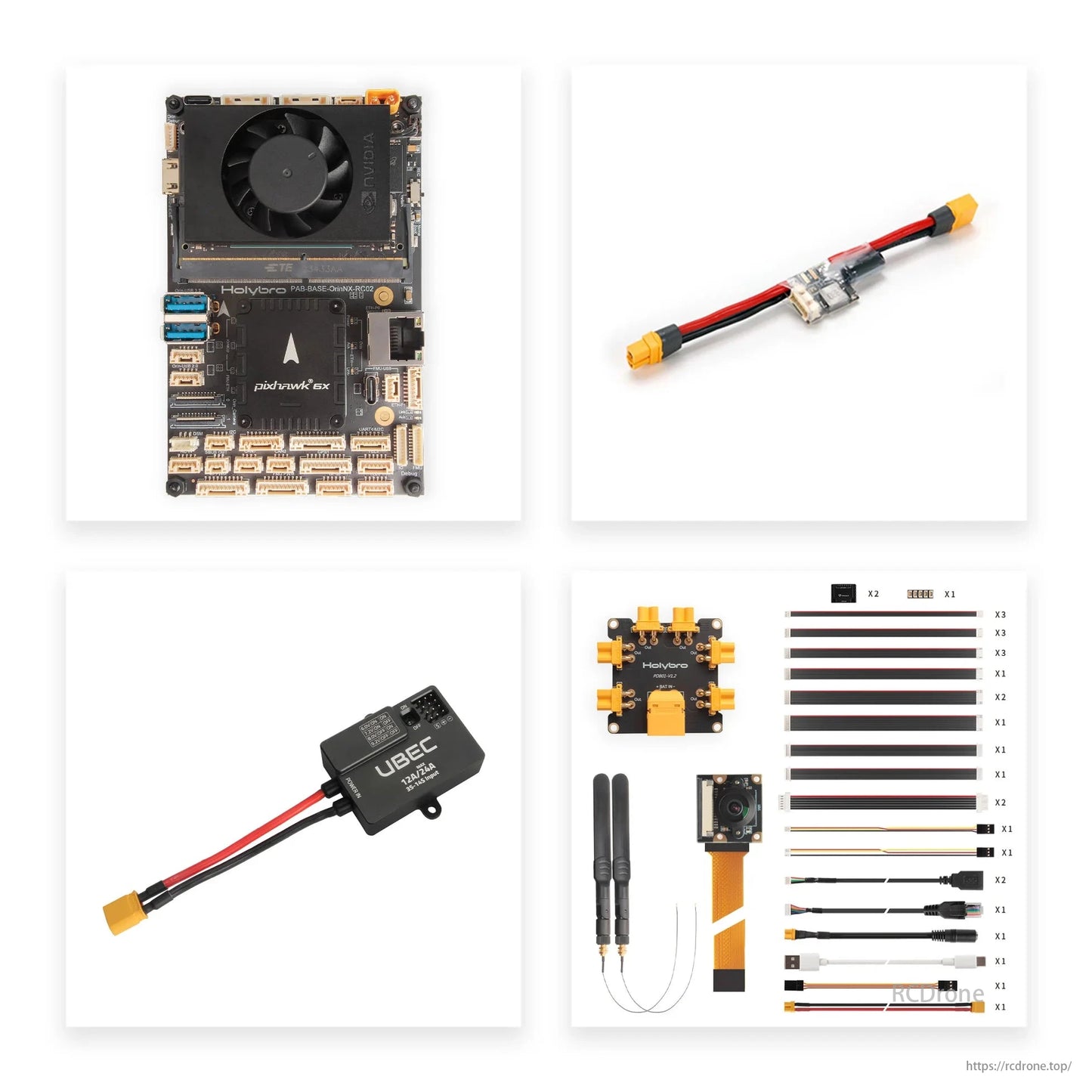
Zawartość opakowania
Pakiet Pixhawk 6X
-
Moduł kontrolera lotu Pixhawk 6X (ICM-45686)
-
Listwa przypodłogowa Pixhawk Jetson Orin
-
Nvidia Orin NX (16 GB RAM) / Orin Nano (4 GB RAM) z radiatorem i wentylatorem
-
Dysk SSD: Samsung PM9B1 PCIe 4.0 NVMe 512 GB
-
Moduł Wi-Fi i Bluetooth: Intel 8265NGW AC Dual Band / Realtek RTL8B22CE
-
Kamera: IMX219-200
-
Moduł zasilania PM02D
-
UBEC 12A (3-14S)
-
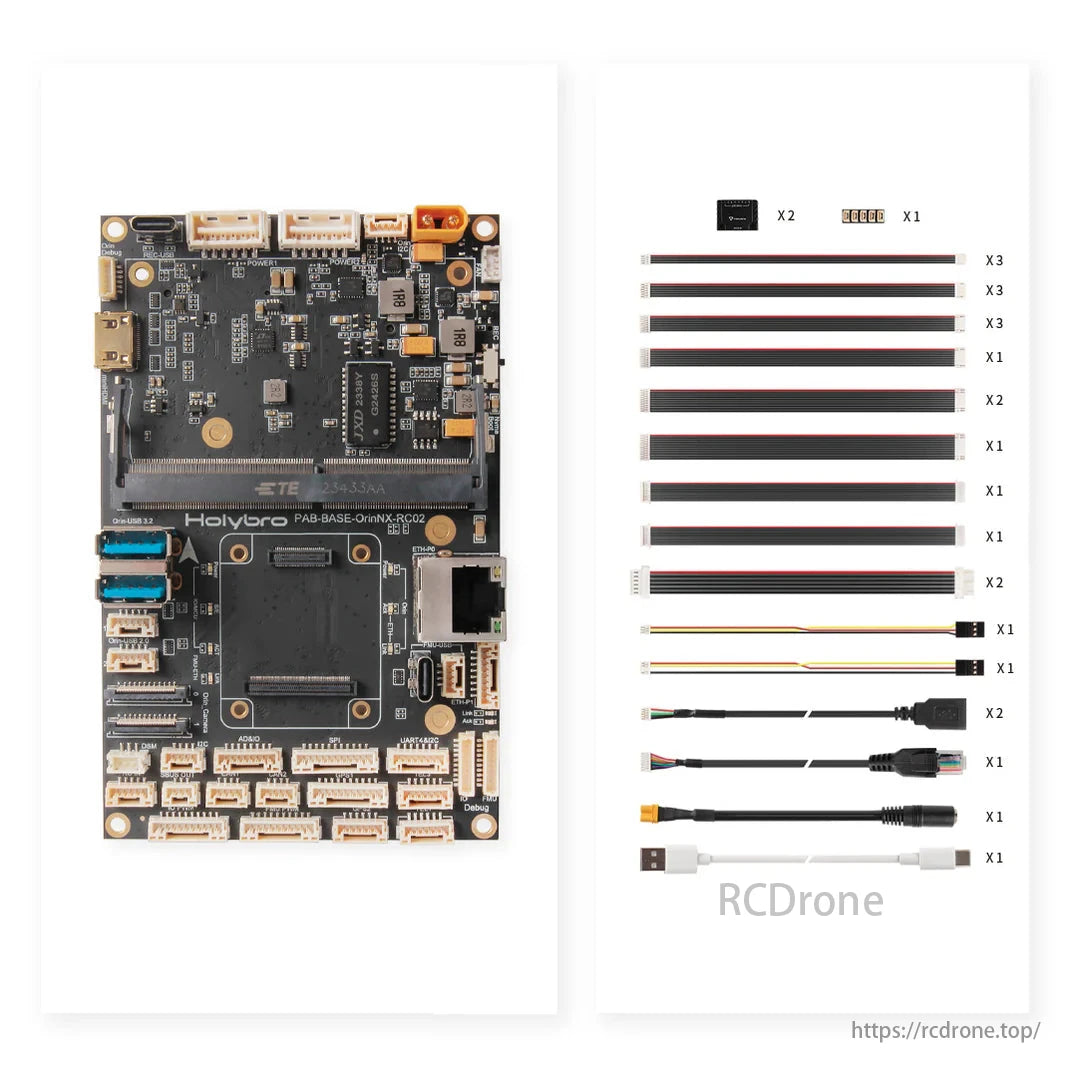
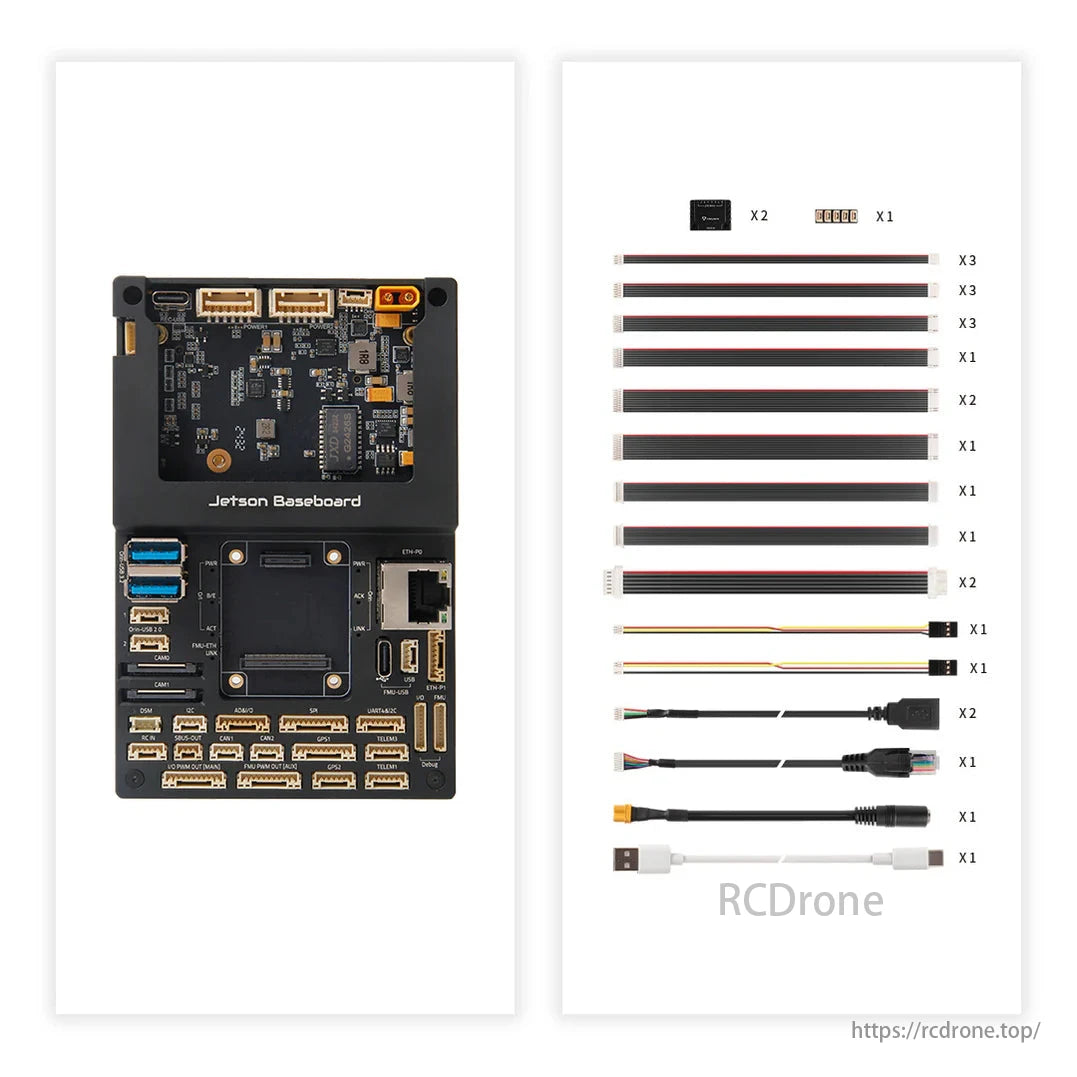
Zestaw płytek PDB i kabli
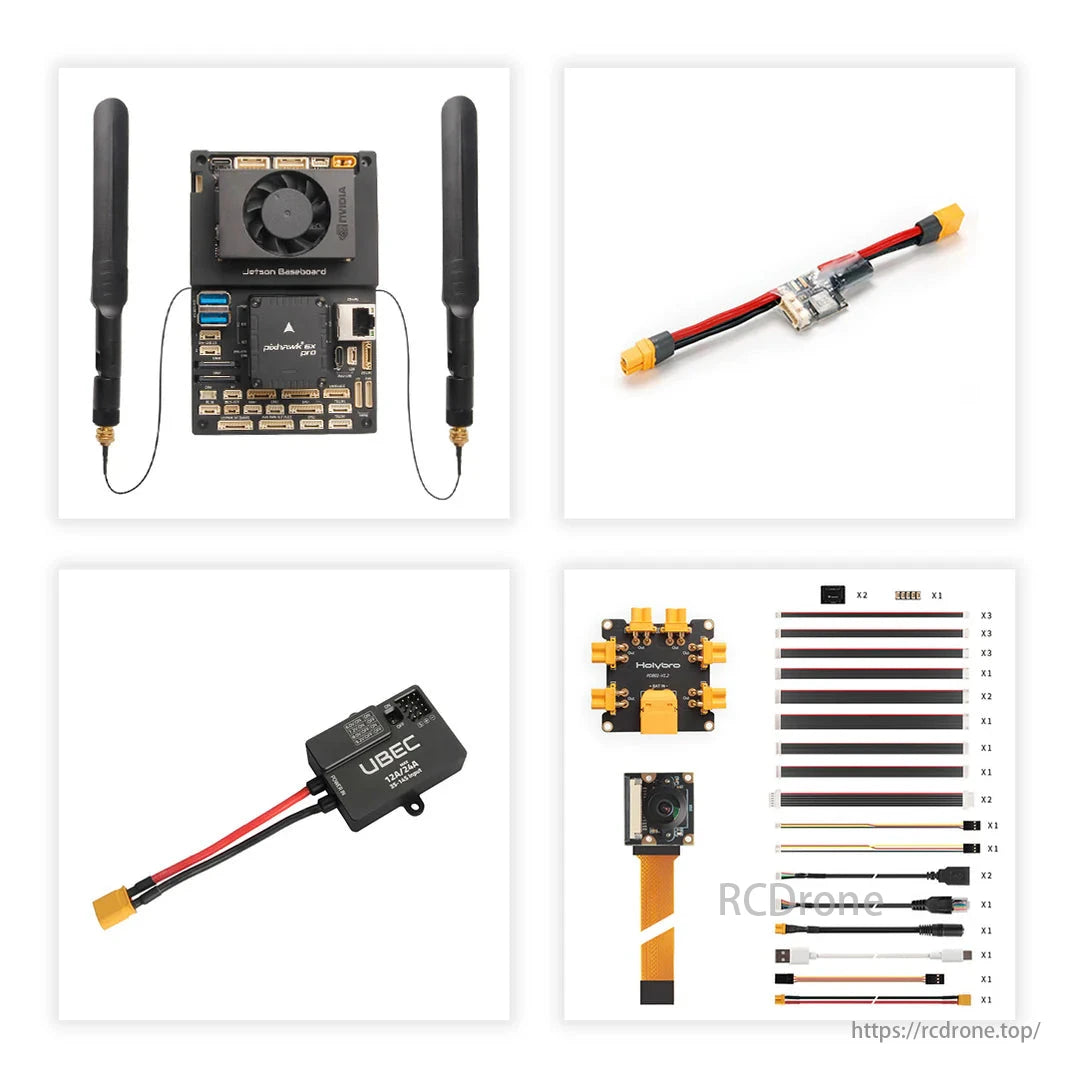
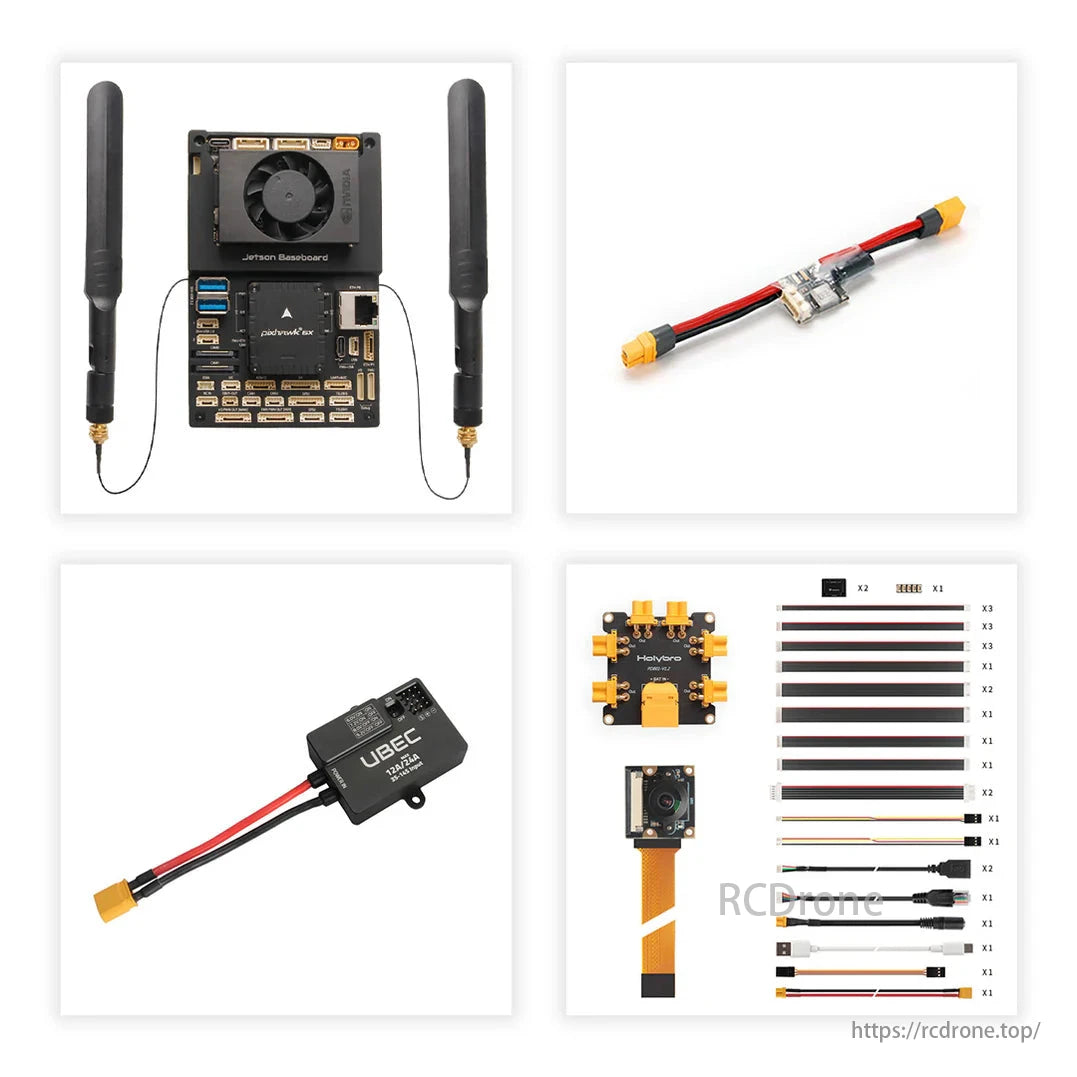
Pakiet Pixhawk 6X Pro
-
Moduł kontrolera lotu Pixhawk 6X Pro
-
Listwa przypodłogowa Pixhawk Jetson Orin (z obudową lub bez)
-
Nvidia Orin NX (16 GB RAM) / Orin Nano (4 GB RAM) z radiatorem i wentylatorem
-
SSD, moduł Wi-Fi/Bluetooth, kamera, moduł zasilania PM02D, UBEC 12A, płyta PDB, zestaw kabli
Tylko listwa przypodłogowa Jetson
-
Listwa przypodłogowa Pixhawk Jetson Orin (z obudową lub bez)
-
Zestaw kabli
Linki referencyjne
Domyślne dane logowania dla Jetson Orin:
-
ID:
świętybro -
Hasło:
123
Bliższe dane




Pixhawk i Nvidia Jetson połączone na jednej płycie.

Nvidia jetson podłączony przez uart can i przełącznik ethernetowy za pomocą złącza rj45 dla systemów autopilota
Specyfikacja Open Source Pixhawk Autopilot Bus (PAB)

System złączy Jetson SoDIMM w pełni kompatybilny: Jetson Orin NX/Nano

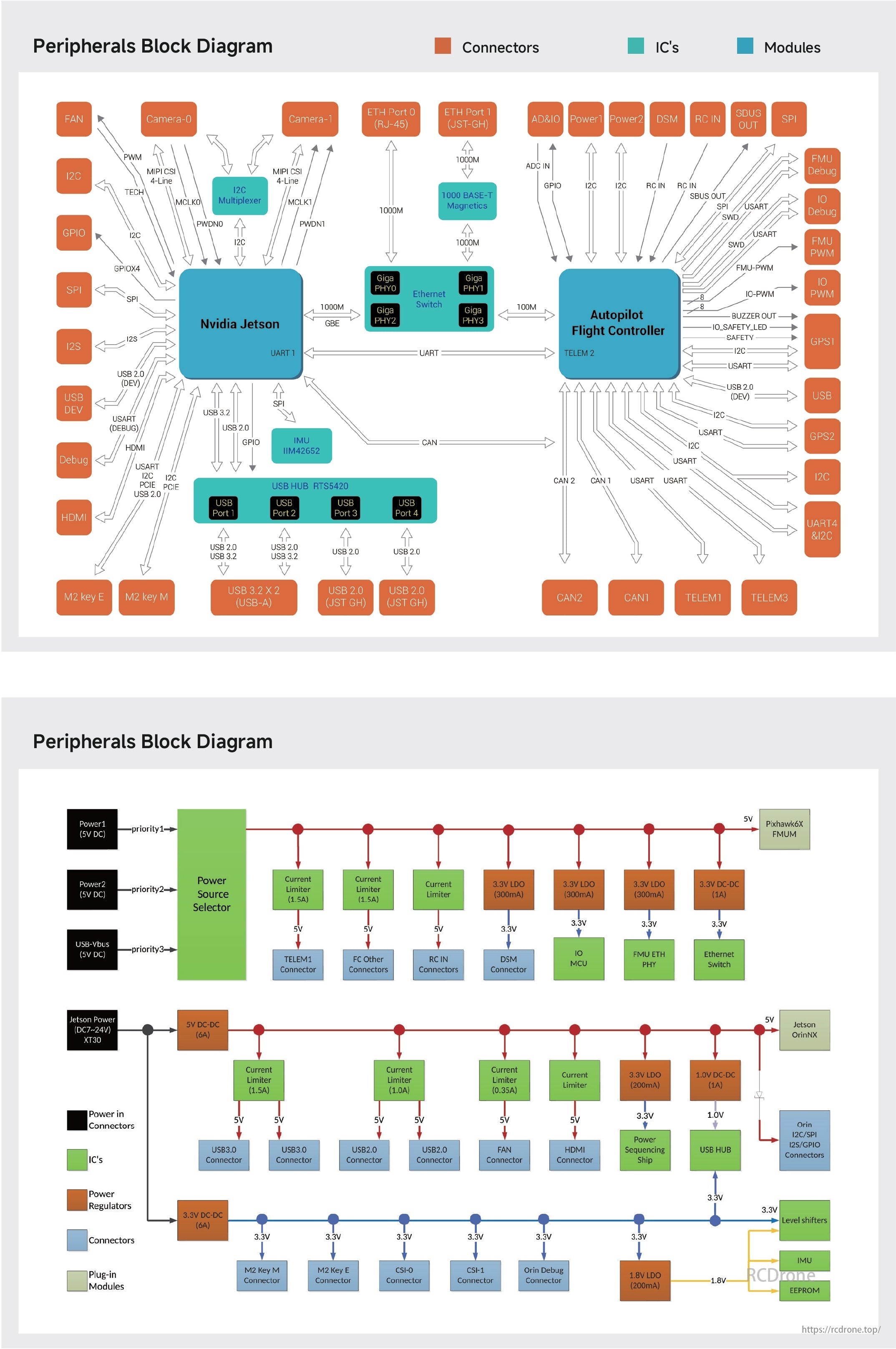
Na obrazie przedstawiono schemat blokowy urządzeń peryferyjnych dla systemu wbudowanego, zawierającego komponenty takie jak Nvidia Jetson i Autopilot Flight Controller. Zawiera różne złącza, układy scalone i moduły, takie jak porty USB, przełączniki Ethernet i regulatory mocy, ilustrując ich połączenia i przepływ danych.
Schemat połączeń referencyjnych

Dwa diagramy ilustrują systemy dystrybucji mocy dla modułu Jetson wykorzystujące jedną baterię. Lewy diagram wykorzystuje moduł zasilania PM02D i płytę dystrybucji mocy, podczas gdy prawy diagram obejmuje zewnętrzny UBEC dla baterii większych niż 4S.Oba rozwiązania gwarantują właściwą regulację napięcia dla Jetson i Pixhawk Power.
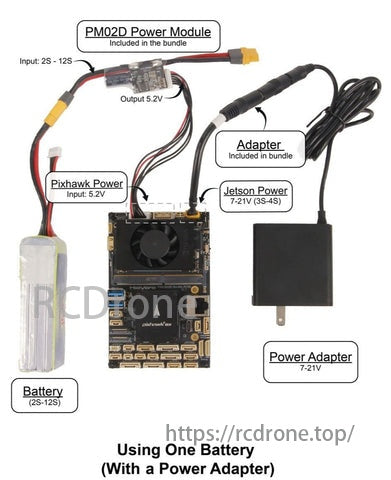
Moduł zasilania PM02D łączy akumulator z Pixhawkiem i Jetsonem, wykorzystując jeden akumulator z zasilaczem o napięciu wejściowym 7–21 V.
Related Collections