Moduł zasilania Holybro PM02D wysokiego napięcia (2S-12S)v do kontrolera lotu autopilota
Moduł zasilania Holybro PM02D wysokiego napięcia (2S-12S)v do kontrolera lotu autopilota
HolyBro
Nie można załadować gotowości do odbioru
- - Wersja PM02D HV jest obsługiwana przez PX4. W przypadku Ardupilota jest obsługiwana w wersji 4.4 i nowszych. Pełny przewodnik konfiguracji można znaleźć tutaj.
- - Ten PM wykorzystuje cyfrowe wyjście danych sygnału I2C i nie jest kompatybilny z kontrolerem lotu, który wykorzystuje analogowy PM, takim jak kontrolery lotu Pixhawk 6C i Mini, Pixhawk4 i Mini, pix32 v5 lub Durandal.
Opis
PM02D zapewnia regulowane zasilanie Pixhawk® 5X i 6X z akumulatora, a także pomiary zużycia prądu i napięcia akumulatora, a wszystko to za pomocą 6-pinowego kabla. Wbudowany regulator przełączający wyprowadza napięcie 5,2 V i maksymalnie 3 A z akumulatorów LiPo do 12 S (HV). Moduł zasilania jest dostarczany w całości zmontowany ze złączami XT60, owiniętymi w rurkę termokurczliwą w celu ochrony przed uszkodzeniami fizycznymi.
Nie jest przeznaczony do zasilania serwomechanizmów, należy w tym celu używać ESC/BEC samolotu. Złącze przewód-płytka Molex CLIK-Mate o rozstawie 2,00 mm jest przystosowane do prądu 3,0 A na styk.
Specyfikacja
- Napięcie wejściowe
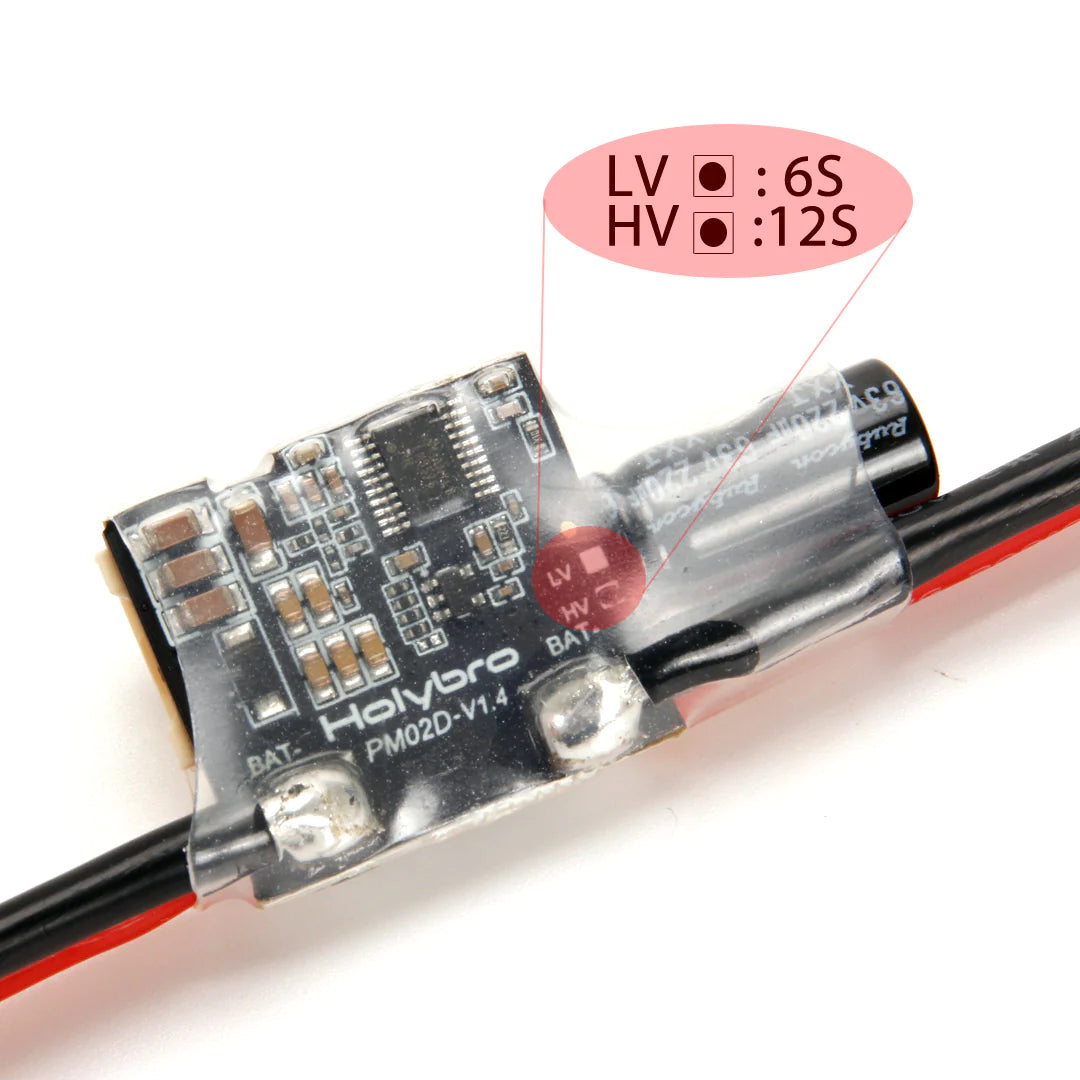
- LV: 2S-6S (wycofane)
- WN: 2S-12S
- PCB ciąg dalszy Aktualna ocena: 60A
- Prąd udarowy PCB: 100 A (<60 s)
- Maksymalny wykrywany prąd:
- LV: 164A (wycofane)
- WN: 327A
- Monitor napięcia i prądu z interfejsem zgodnym z I2C
- Wyjścia 5,2 V i maks. 3 A
- Waga: 20g

Aktualna ocena:
Model PM02D jest wyposażony w wtyczki XT60 z silikonowymi przewodami 14 AWG o natężeniu ciągłym 30 A i prądzie impulsowym 60 A (<1 minuty). Jeżeli potrzebny jest większy prąd, należy odpowiednio zmienić typ wtyczki i przekrój przewodu. Możesz potraktować ten wykres jako odniesienie.
MAPA PIN:

Konfiguracja:
Jeśli używasz wersji PM02D HV, musisz ustawić SENS_EN_INA228 , aby włączyć.
Pełny podręcznik konfiguracji można znaleźć tutaj.
Pakiet zawiera:
Related Collections