Zestaw deweloperski Holybro X500 v2 PX4 - zestaw dronów z włókna węglowego z Holybro Pixhawk 6C / 6X, M8N GPS, radio telemetryczne SiK, dron przemysłowy
Zestaw deweloperski Holybro X500 v2 PX4 - zestaw dronów z włókna węglowego z Holybro Pixhawk 6C / 6X, M8N GPS, radio telemetryczne SiK, dron przemysłowy
HolyBro
Cena regularna
$769.00 USD
Cena regularna
Cena promocyjna
$769.00 USD
Cena jednostkowa
na
Z wliczonymi podatkami.
Koszt wysyłki obliczony przy realizacji zakupu.
Nie można załadować gotowości do odbioru
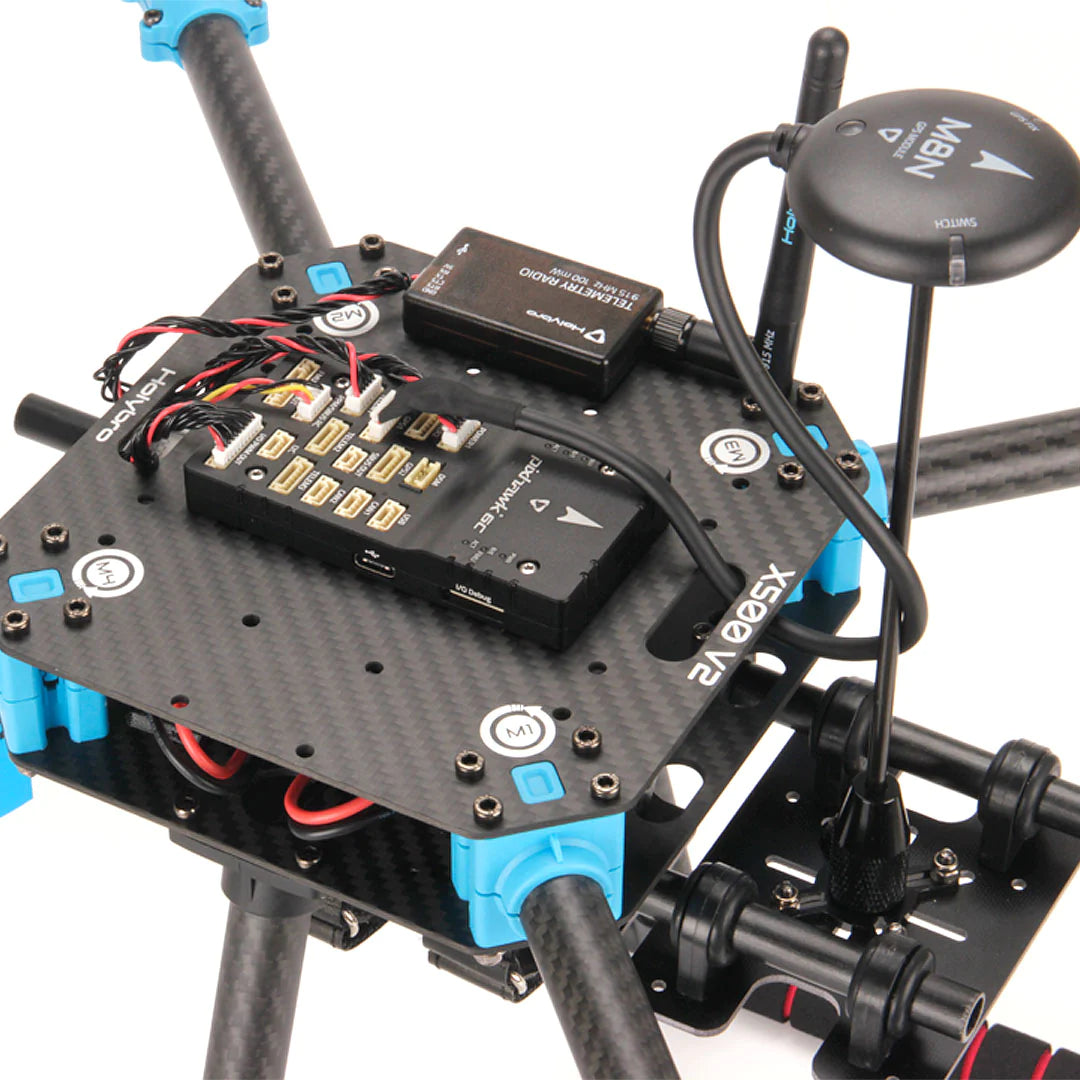
Zestaw deweloperski PX4 — X500 v2 to niedrogi, lekki i solidny zestaw do profesjonalnego drona rozwojowego z włókna węglowego z najnowszym Holybro Pixhawk 6C lub Pixhawk 6X Kontroler lotu z autopilotem, M8N GPS i radio telemetryczne SiK typu plug & play. Jest szybki i łatwy w montażu (około 30 minut) bez konieczności lutowania, dzięki czemu możesz zamiast tego spędzić więcej czasu na lataniu i rozwijaniu. Jest dostarczany z zestawem ramy X500 V2 i silnikami, sterownikami ESC, tablicami rozdzielczymi mocy i dodatkowymi śmigłami. Ramiona dronów są wstępnie zainstalowane z silnikami i esc, dzięki czemu można je podłączyć bezpośrednio do tablicy rozdzielczej zasilania bez konieczności lutowania.
Rama (X500 v2) wykonana jest w całości ze skośnego włókna węglowego, z ramionami rur z włókna węglowego wspartymi na nowo zaprojektowanych nylonowych złączach wzmocnionych włóknami z wygodnymi nacięciami zarówno po stronie silnika, jak i korpusu, co zapewnia znacznie łatwiejszą i prostszą instalację. Podwozie składa się z rurek z włókna węglowego o średnicy 16 mm i 10 mm ze złączami, które zostały pogrubione i wzmocnione.
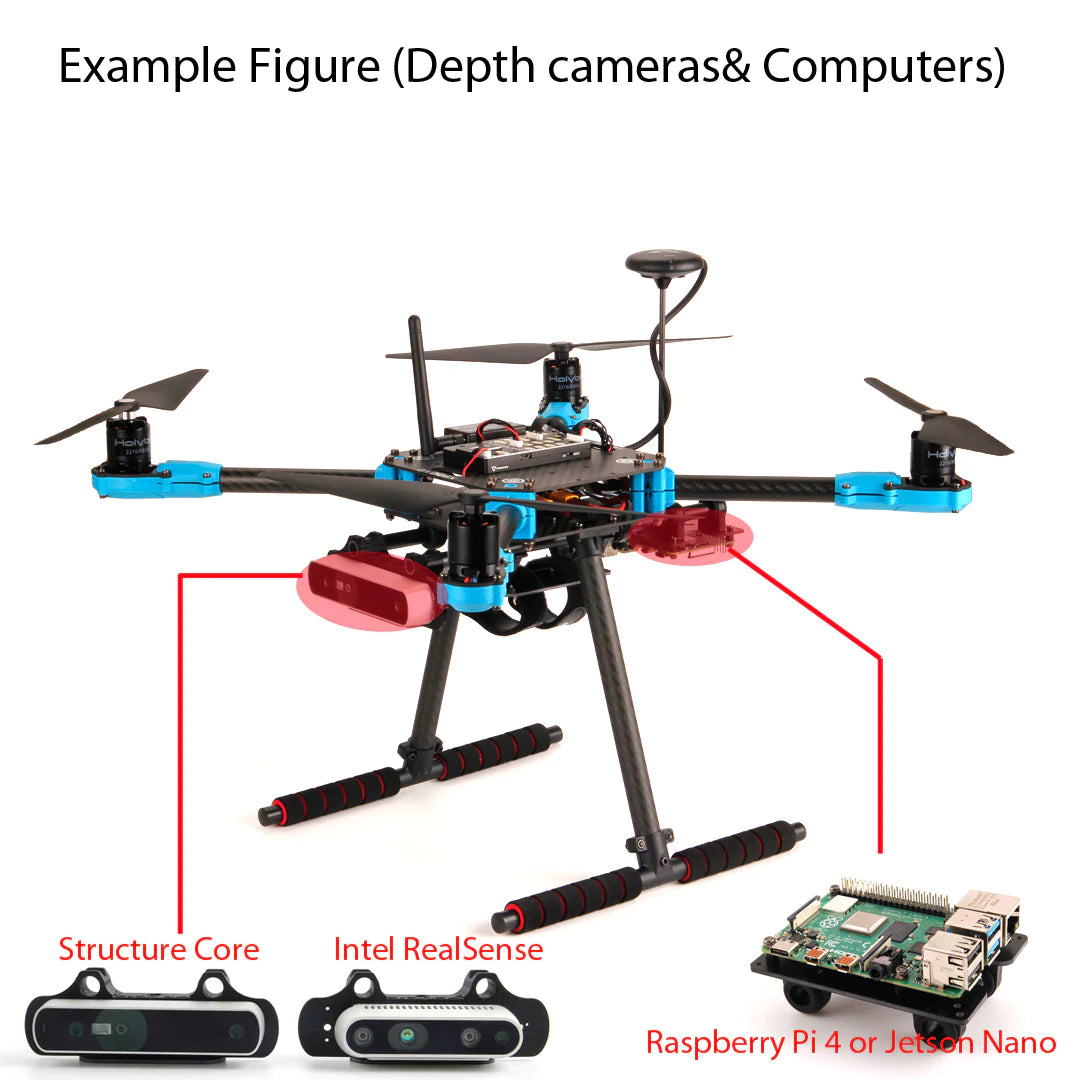
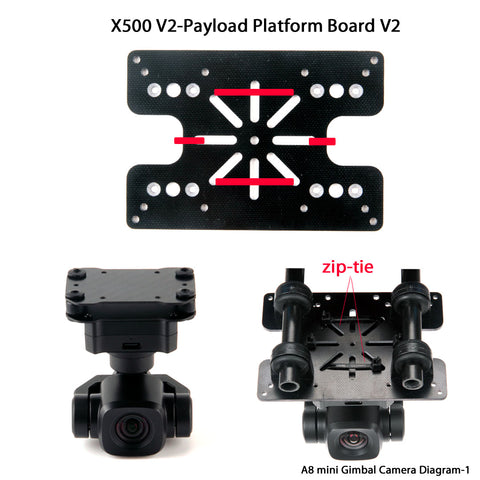
Płyta platformy ma teraz otwory montażowe dla GPS i popularnych komputerów towarzyszących, takich jak Raspberry Pi 4 i Jetson Nano. Dostępny jest opcjonalny uchwyt kamery głębinowej (do nabycia osobno) dla różnych kamer głębinowych, takich jak kamery głębinowe z serii Intel RealSense i Structure Core. Zwiększono odstępy między górnymi i dolnymi płytami z włókna węglowego, aby zapewnić łatwiejszy dostęp. Regulowana płyta do montażu akumulatorów została powiększona, aby obsługiwać większe akumulatory i zapewniać dłuższy czas lotu. System montażu na szynie jest gotowy na przyjęcie całej gamy uchwytów do kamer i gimbali do różnych zastosowań. Wszystkie narzędzia do montażu znajdują się w pakiecie.
Uwaga: Kontroler lotu Pixhawk 6C jest kompatybilny zarówno z PX4, jak i Ardupilot, ale jest dostarczany z oprogramowaniem układowym autopilota typu open source PX4.
Cecha:
- Całkowicie nowy Pixhawk 6C lub Kontroler lotu Pixhawk 6X z M10 Moduł GPS oraz radiotelemetryczne SiK typu Plug & play
- Nowa konstrukcja ramy z minimalnym czasem montażu (~30 minut), nie wymaga lutowania
- Rama z włókna węglowego z nylonowymi złączami wzmocnionymi włóknem zapewniającymi łatwą i prostą instalację
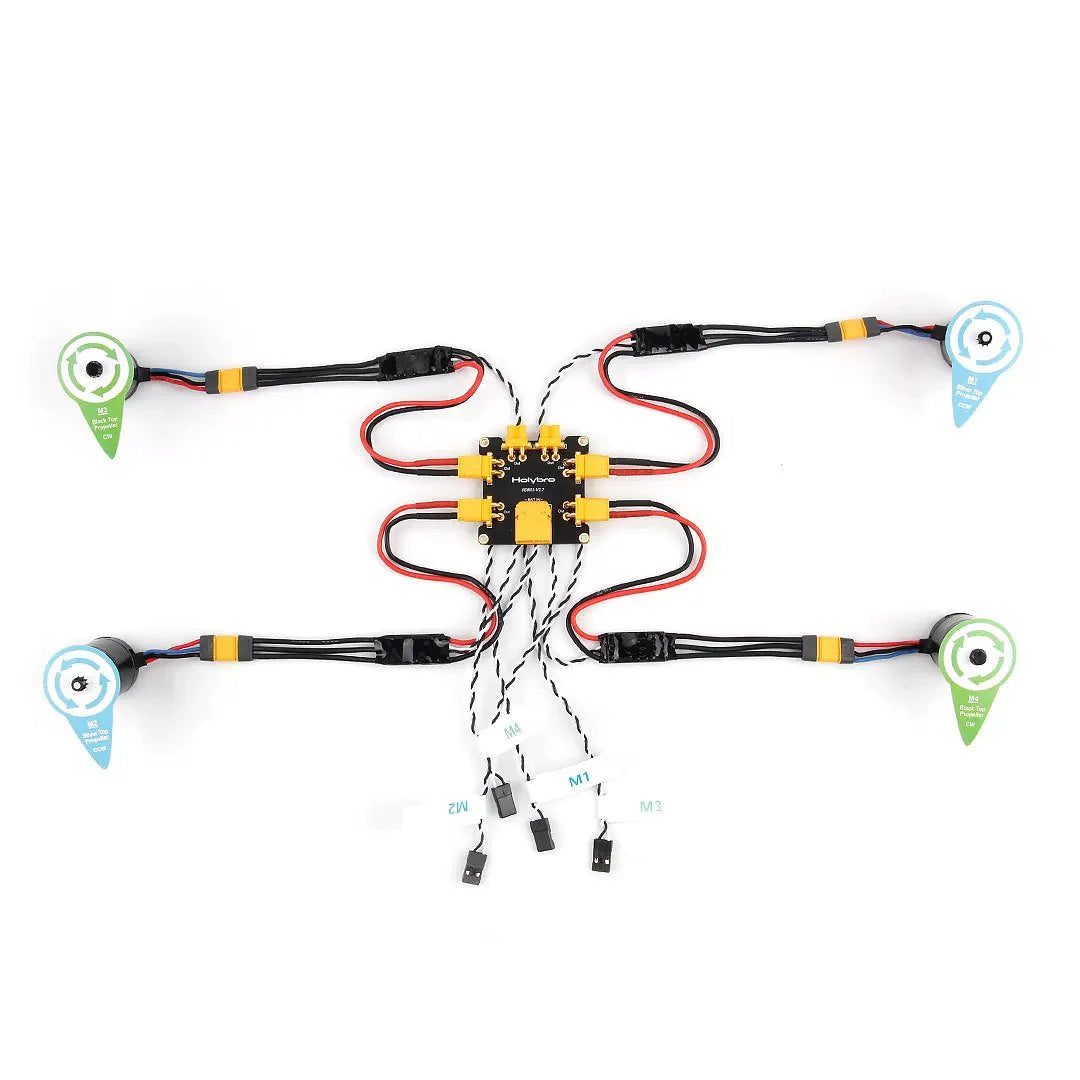
- Wstępnie zainstalowane silniki i układy ESC z prostymi wtyczkami zasilania XT30 do PDB
- Rozdzielnica zasilania (PDB) z wtyczkami XT60 i XT30
- Uchwyt do komputera towarzyszącego, takiego jak Raspberry Pi i Nvidia Jetson Nano
- Opcjonalny uchwyt kamery głębi dla technologii Intel RealSense i Structure Core
Uwaga:
- Wersja Pixhawk 6X jest teraz dostarczana z wersją PM02D-HV (wysokonapięciową). W PX4 musisz ustawić SENS_EN_INA228 , aby włączyć tę opcję. Ta wersja HV jest obsługiwana tylko w Ardupilot 4.4 i nowszych. Podręcznik konfiguracji można znaleźć tutaj.
-
Obsługa oprogramowania sprzętowego dla M10 GPS: Wymagana jest wersja PX4 1.14 i ArduPilot 4.3 lub nowsza.
Zestaw deweloperski PX4 — X500 v2 Zawiera:
- Kontroler lotu autopilota: Pixhawk 6C (obudowa z tworzywa sztucznego) i PM02 V3 lub Pixhawk 6X (standardowa podstawa) i PM02D
- Moduł GPS M10
- Radio telemetryczne SiK V3 433/915 MHz
- Zestaw ramek X500 V2 (SKU30120)
-
Preinstalowane elementy:
- Silniki – silnik Holybro 2216 KV920 (4 szt.) z wtyczką XT30 (Specyfikację silnika można znaleźć tutaj)
- ESC - BLHeli S ESC 20A (4 szt.) z wtyczkami XT30 - Kompatybilny z akumulatorem 4S
- 1045 śmigieł (6 szt.)
- Płytka dystrybucji zasilania (wtyczka XT60 do akumulatora i wtyczka XT30 do regulatorów ESC i urządzeń peryferyjnych)
-
Inne elementy opcjonalne (sprzedawane osobno)
- Kontroler RadioMaster TX16S RC
- Odbiornik RadioMaster R81
- Uchwyt kamery głębinowej
Szczegóły zestawu ramy X500 V2 (SKU30120):
- Korpus — płyta górna i dolna w całości z włókna węglowego (144 x 144 mm, grubość 2 mm)
- Ramię — bardzo wytrzymałe i ultralekkie rurki z włókna węglowego 16 mm z nowo zaprojektowanymi nylonowymi złączami wzmocnionymi włóknami
- Podwozie — rurki z włókna węglowego o średnicy 16 mm i 10 mm ze wzmocnionymi i ulepszonymi plastikowymi trójnikami.
- Płyta platformowa - z otworami montażowymi dla GPS i popularnych komputerów towarzyszących, takich jak Raspberry Pi 4 i Jetson Nano
- Podwójny system montażu na szynie o średnicy 10 mm i długości 250 mm
- Uchwyt akumulatora z dwoma paskami akumulatora
- Narzędzia ręczne do montażu
Specyfikacja mechaniczna:
- Rozstaw osi: 500mm
- Wzór mocowania silnika: 16x16mm
- Korpus ramy: 144x144mm, grubość 2mm
- Wysokość podwozia: 215mm
- Odstęp pomiędzy płytą górną i dolną: 28mm
- Waga: 610g
- Czas lotu: ~18 minut zawisu bez dodatkowego ładunku. Testowano z baterią 5000 mAh.
- Ładność: 1500g (bez akumulatora, przepustnica 70%)
- Zalecana bateria: 4S 3000-5000mAh 20C+ z baterią Lipo XT60 (brak w zestawie)

Instrukcja montażu X500 v2
Odniesienie:
Specyfikacja silnika
Druk 3D:
Holybro_X500_V2_3D DrukujPrzewodnik instalacji:
Artykuł dotyczący idorobotyki
Przewodnik konfiguracji PX4
Przewodnik konfiguracji Ardupilota
Kilka wskazówek:
Related Collections