



Inspire Robots RH56BFX Zręczna Ręka Robota z 6DOF, 12 Przegubami, Zintegrowanymi Czujnikami Siły, 3KG Udźwigu do Przemysłu & i Badań
Inspire Robots RH56BFX Zręczna Ręka Robota z 6DOF, 12 Przegubami, Zintegrowanymi Czujnikami Siły, 3KG Udźwigu do Przemysłu & i Badań
Inspire Robots
Nie można załadować gotowości do odbioru
Overview
Seria RH56BFX Dexterous Robot Hand to wysokoprędkościowa, precyzyjna pięciopalczasta ręka robotyczna zaprojektowana do ruchów przypominających ludzkie oraz wszechstronnych zastosowań. Dzięki 6 stopniom swobody i 12 stawom, naśladuje naturalne ruchy dłoni w interaktywnych demonstracjach, symulacjach gestów oraz złożonych zadaniach manipulacyjnych. Zintegrowane czujniki siły i dotyku zapewniają precyzyjną kontrolę i elastyczność, co czyni ją odpowiednią do środowisk przemysłowych, komercyjnych i badawczych.
Kluczowe cechy
-
Rozmiar i struktura przypominająca ludzką – Naśladuje wymiary dorosłej ludzkiej dłoni dla naturalnych interakcji.
-
Zintegrowane czujniki siły i dotyku – Umożliwiają dokładne określenie siły chwytu oraz wrażliwą informację zwrotną dotykową.
-
Wysoka prędkość reakcji – Osiąga prędkości zginania palców do 570°/s, wspierając zwinne operacje.
-
Pozycjonowanie submilimetrowe – Powtarzalność ±0,20 mm zapewnia stabilne i precyzyjne działania.
-
Wysoka siła wyjściowa – Wyjście jednego palca do 3 kg i maksymalna siła chwytu wynosząca 6 N.
-
Trwałość – Zaprojektowane na ponad milion cykli operacyjnych.
-
Interfejs przemysłowy – Komunikacja RS485 i zasilanie 24V DC dla bezproblemowej integracji.
Specyfikacje techniczne
| Parametr | Specyfikacja |
|---|---|
| Seria | RH56BFX |
| Model | RH56BFX-2L (Lewy) / RH56BFX-2R (Prawy) |
| Stopnie swobody | 6 |
| Liczba stawów | 12 |
| Waga | 540 g |
| Interfejs sterujący | RS485 |
| Napięcie robocze | DC 24V ±10% |
| Prąd statyczny | 0.2 A |
| Maksymalne natężenie prądu | 2 A |
| Dokładność powtarzalności pozycji | ±0,20 mm |
| Maksymalna siła chwytu – kciuk | 6 N |
| Maksymalna siła chwytu – cztery palce | 4 N |
| Rozdzielczość siły chwytu | 0.50 N |
| Zakres obrotu kciuka | >65° |
| Prędkość ruchu kciuka | 235°/s |
| Prędkość zginania kciuka | 150°/s |
| Prędkość zginania czterech palców | 570°/s |
Zastosowania
Ręka RH56BFX jest odpowiednia do szerokiego zakresu dziedzin, w tym:
-
Recepcja powitalna – Interakcja człowiek-robot w celu powitania gości.
-
Bezobsługowy handel detaliczny – Wybieranie i umieszczanie przedmiotów w zautomatyzowanych sklepach.
-
Usługi budowlane – Obsługa przełączników, pokręteł i narzędzi w środowiskach serwisowych.
-
Usługi rodzinne – Pomoc w codziennych zadaniach domowych.
-
Wsparcie dla osób starszych i niepełnosprawnych – Zapewnienie wsparcia i interakcji dla potrzebujących.
-
Specjalne branże – Złożone operacje w wyspecjalizowanych lub niebezpiecznych środowiskach.
Szczegóły

Biohand RH56BFX zręczna ręka robota, szybsza prędkość, zaawansowany design do precyzyjnych zadań.

Zręczna ręka robota z 6 stopniami swobody, 12 stawami, powtarzalnością submilimetrową, czujnikiem siły i nośnością kilku kg.

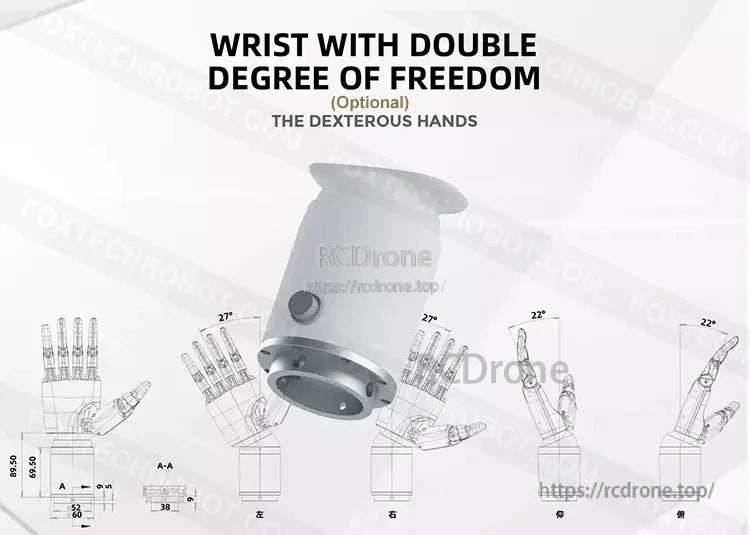
Nadgarstek z podwójnym stopniem swobody, opcjonalne zręczne ręce, kąty obrotu 27° i 22°, z szczegółowymi rysunkami technicznymi.

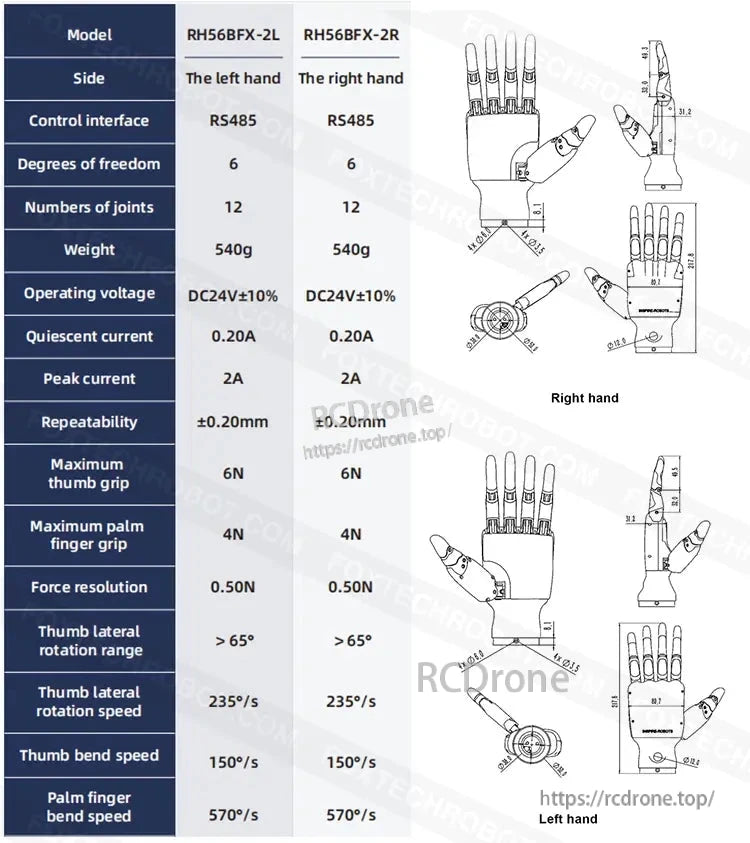
Ręka robota Inspire Robots RH56BFX oferuje 6 stopni swobody, 12 stawów, ±0.20 mm powtarzalność, 540 g wagi, zasilanie DC24V, obsługuje uchwyt kciukowy 6N, uchwyt dłoni 4N, rozdzielczość siły 0,50N z wysoką prędkością rotacji bocznej i zginania dla obu rąk.
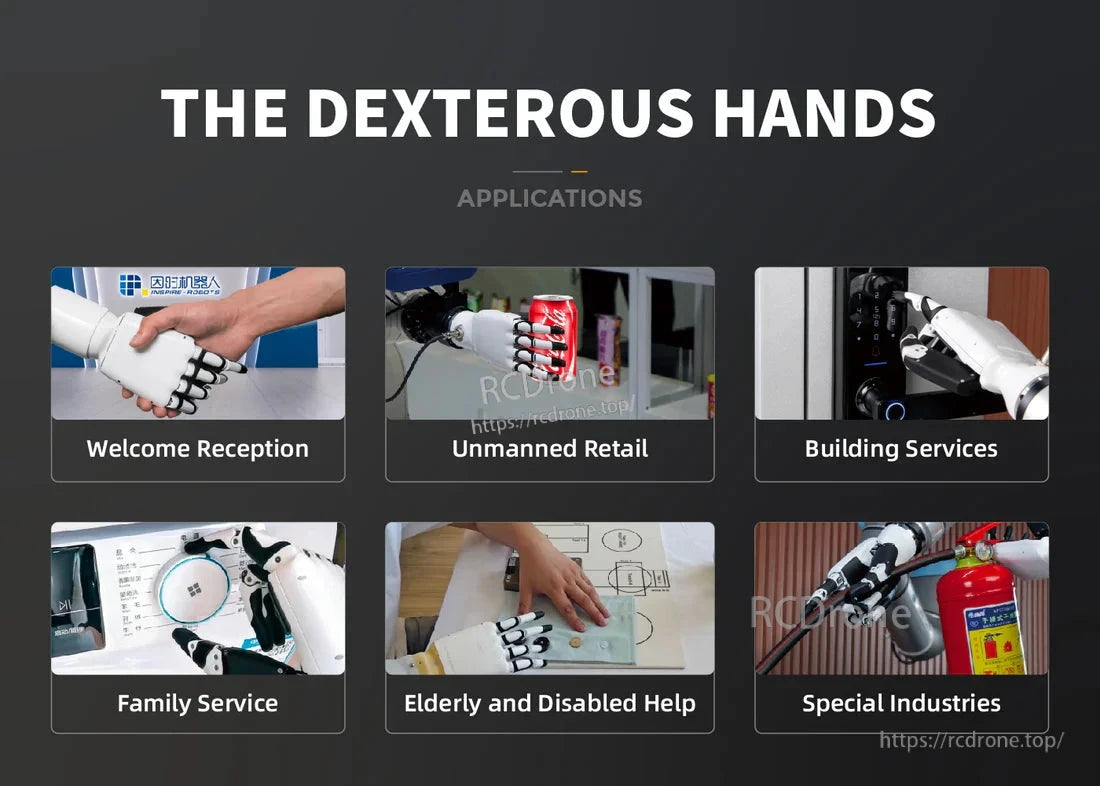
Aplikacje zręcznych robotycznych rąk w recepcji, handlu detalicznym, usługach, rodzinie, pomocy dla osób starszych oraz w przemyśle specjalnym.
Related Collections



