


Inspire Robots RH56DFTP Zręczna Ręka Robota – 6 DOF, 30N Uścisk, Dotykowe & Czujniki Siły, Sterowanie ModbusTCP+CAN
Inspire Robots RH56DFTP Zręczna Ręka Robota – 6 DOF, 30N Uścisk, Dotykowe & Czujniki Siły, Sterowanie ModbusTCP+CAN
Inspire Robots
Nie można załadować gotowości do odbioru
Overview
Inteligentna bioniczna ręka robota Inspire Robots RH56DFTP to ręka o wysokiej precyzji, pięciopalczasta, zaprojektowana do zaawansowanych zastosowań robotycznych. Posiada 6 stopni swobody, 12 stawów oraz połączenie 6 czujników siły i 17 czujników dotykowych, co zapewnia zwinność i percepcję dotykową zbliżoną do ludzkiej. Dzięki sile nacisku na opuszkach palców wynoszącej 30N (≈3 kg na palec), wysokiej prędkości ruchu kątowego oraz bezproblemowej komunikacji ModbusTCP+CAN (RS485), ta ręka jest idealna do badań, automatyzacji przemysłowej i robotyki bionicznej.
Kluczowe cechy
-
Precyzja dotykowa zbliżona do ludzkiej: Zintegrowane czujniki dotykowe oferują percepcję w czasie rzeczywistym dla dokładnej manipulacji obiektami.
-
Silny i stabilny chwyt: Każdy palec zapewnia do 3 kg siły działania, co umożliwia niezawodne chwytanie różnych obiektów.
-
Samozamykający się przy utracie zasilania: Utrzymuje pozycję po wyłączeniu zasilania, eliminując potrzebę ponownego zerowania przy uruchomieniu.
-
Wysoka prędkość działania: Ruch kciuka przekracza 130°/s, podczas gdy ruch czterech palców osiąga 200°/s dla responsywnej kontroli.
-
Trwały i niezawodny: Zaprojektowany do długoterminowego użytkowania w laboratoriach badawczych, platformach robotycznych i środowiskach przemysłowych.
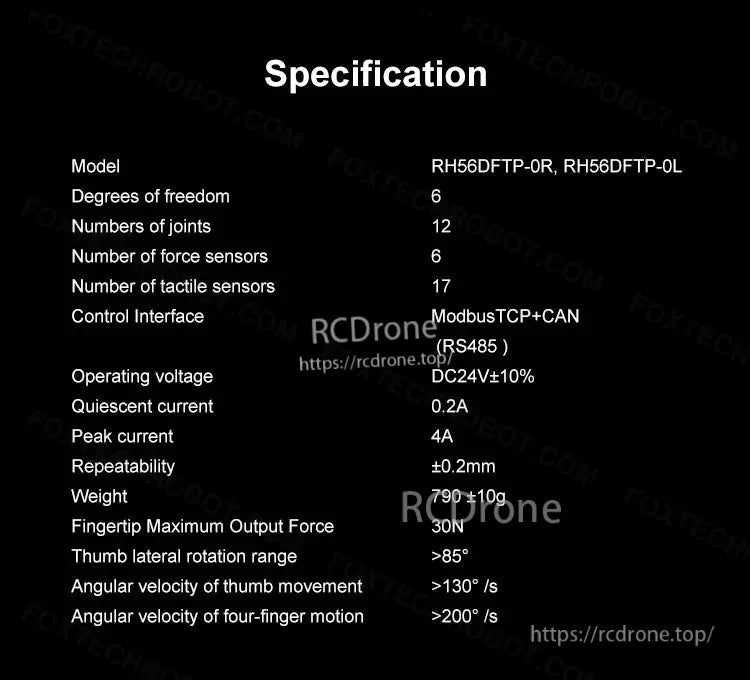
Specyfikacje
| Parametr | Wartość |
|---|---|
| Model | RH56DFTP-0R, RH56DFTP-0L |
| Stopnie swobody | 6 |
| Liczba stawów | 12 |
| Czujniki siły | 6 |
| Czujniki dotykowe | 17 |
| Interfejs sterujący | ModbusTCP + CAN (RS485) |
| Napięcie robocze | DC 24V ±10% |
| Prąd spoczynkowy | 0.2A |
| Prąd szczytowy | 4A |
| Powtarzalność | ±0.2mm |
| Waga | 790g ±10g |
| Maksymalna siła wyjściowa na opuszkach palców | 30N (≈3 kg) |
| Zakres rotacji bocznej kciuka | >85° |
| Prędkość kątowa – kciuk | >130°/s |
| Prędkość kątowa – cztery palce | >200°/s |
Zastosowania
-
Badania i rozwój: Zaawansowane badania nad robotyką w uniwersytetach i laboratoriach.
-
Automatyzacja przemysłowa: Wysokoprecyzyjne zadania montażowe i manipulacyjne.
-
Rozwiązania bioniczne: Badania nad protezami rąk i robotyką humanoidalną.
-
Sztuczna inteligencja i uczenie maszynowe: Projekty związane z dotykowym czuciem i manipulacją wymagające dokładnej informacji zwrotnej w czasie rzeczywistym.
Najważniejsze
RH56DFTP doskonale sprawdza się w zadaniach wymagających precyzyjnej kontroli siły oraz delikatnych operacji, takich jak zbieranie borówek, pomidorków koktajlowych czy winogron bez powodowania uszkodzeń. Radzi sobie również z chwytaniem o dużej sile w zastosowaniach przemysłowych, co czyni go wszechstronnym rozwiązaniem do skomplikowanych zadań manipulacyjnych.
Szczegóły
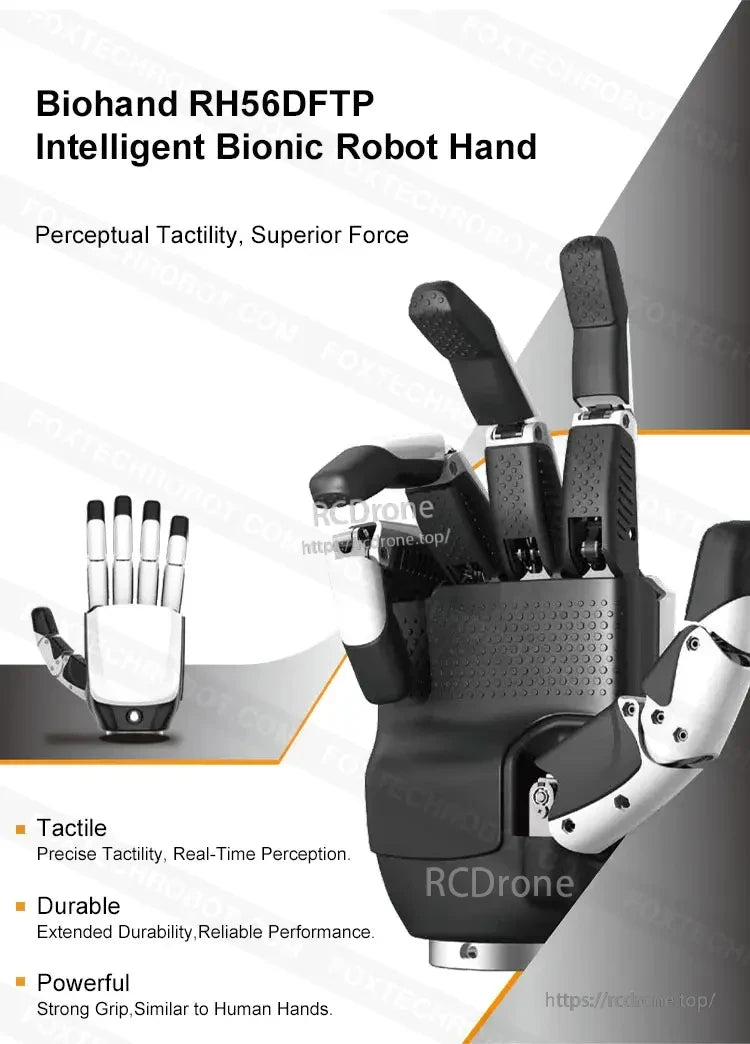
Inteligentna bioniczna ręka robota Biohand RHS6DFTP oferuje percepcyjną taktylność, doskonałą siłę oraz precyzyjną taktylność w czasie rzeczywistym, z trwałą wydajnością i mocnym chwytem, podobnym do ludzkich rąk.

Ręka robotyczna z sześcioma stopniami swobody, zaprojektowana z myślą o precyzji i zręczności, idealna do różnych zastosowań, takich jak chirurgia, montaż czy prace laboratoryjne.

Mocny chwyt, wydajność przypominająca ludzką. Siła działania 3 kg na palec.Zwinna ręka robota o zaawansowanym designie i precyzyjnym inżynierii.


Mechanizm samoblokujący przy utracie mocy utrzymuje pozycję stabilną i niezawodną, bez potrzeby ponownego zerowania przy uruchamianiu lub wyłączaniu.


Wielofunkcyjne narzędzie ręczne z czujnikiem siły, odpowiednie do zbierania i chwytania małych owoców, takich jak jagody, pomidory koktajlowe i winogrona.

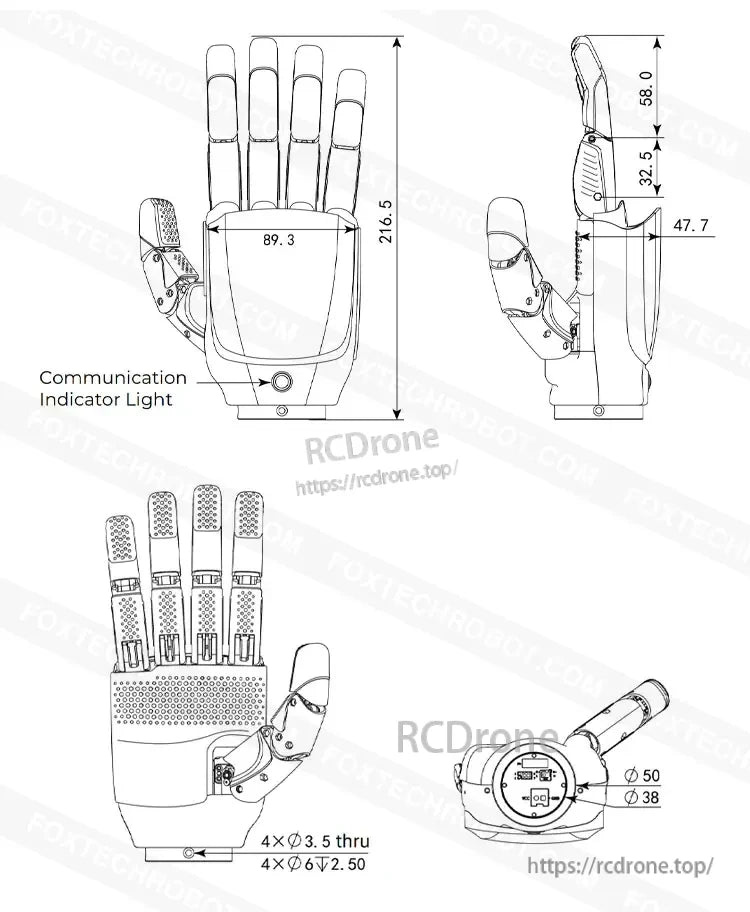
Wskaźnik komunikacji, 8 x 47,7 mm, długość 89 mm, bez LED, 5x5: 38-4x03.5 do 4xp6v2, 50 omów, 2 warstwy
Model specyfikacji RHS6DFTP-OR i RHS6DFTP-OL charakteryzuje się 3 stopniami swobody, 12 stawami oraz 17 czujnikami siły i czujnikami dotykowymi. Używa interfejsu sterowania Modbus TCP+CAN (RS485) z napięciem roboczym DC24V +10%.



Related Collections


