



Inspire Robots RH56DFX Zręczna Ręka Robota – 6 DOF, 12 przegubów, siła chwytu 30N, RS485, czujniki siły & dotykowe
Inspire Robots RH56DFX Zręczna Ręka Robota – 6 DOF, 12 przegubów, siła chwytu 30N, RS485, czujniki siły & dotykowe
Inspire Robots
Nie można załadować gotowości do odbioru
Przegląd
Ręka robota Inspire Robots RH56DFX to precyzyjna, wysokowydajna ręka robotyczna zaprojektowana do wszechstronnych zastosowań w dziedzinie usług, przemysłu i badań. Dzięki 6 stopniom swobody, 12 stawom oraz powtarzalności submilimetrowej, dokładnie naśladuje ruch i zręczność ludzkiej ręki. Zintegrowane czujniki siły i dotyku zapewniają precyzyjne chwytanie i obsługę, podczas gdy solidna konstrukcja gwarantuje niezawodność w wymagających środowiskach, takich jak bezzałogowy handel, operacje przemysłowe i pomoc w rehabilitacji.
Kluczowe cechy
-
6 stopni swobody i 12 stawów dla naturalnych i precyzyjnych ruchów ręki
-
Powtarzalność submilimetrowa dla zadań wymagających wysokiej precyzji
-
Zintegrowane czujniki siły (6) i dotyku (17) dla responsywnej informacji zwrotnej o uchwycie
-
Rozmiar rzeczywistej ręki dla bezproblemowej integracji z robotami humanoidalnymi
-
Silna siła chwytu do 30N siły na końcówce palca i 10N siły chwytu czterema palcami
-
Lekka i trwała konstrukcja (540g–790g w zależności od konfiguracji)
-
Interfejs komunikacyjny RS485 z zasilaniem DC 24V±10%
Szeroki zakres ruchu, w tym >85° rotacja kciuka oraz >130°/s prędkość kątowa kciuka
Specyfikacje techniczne
| Parametr | Wartość |
|---|---|
| Stopnie swobody | 6 |
| Stawy | 12 |
| Interfejs sterujący | RS485 |
| Napięcie robocze | DC 24V ±10% |
| Prąd statyczny | 0.2A |
| Maksymalne natężenie | 2A (wersja 540g) / 4A (wersja 790g) |
| Waga | 540g lub 790±10g |
| Powtarzalność | ±0.20 mm (540g) / ±0.2 mm (790g) |
| Maksymalna siła chwytu kciuka | 15N (540g) / 30N (790g) |
| Maksymalny chwyt czterema palcami | 10N |
| Rozdzielczość chwytu | 0.50N |
| Zakres obrotu kciuka | >65° (540g) / >85° (790g) |
| Prędkość kątowa kciuka | 107°/s (boczny ruch) / >130°/s (ruch) |
| Prędkość czterech palców | 260°/s (zgięcie) / >200°/s (ruch) |
| Czujniki siły | 6 |
| Czujniki dotykowe | 17 |
Zastosowania
RH56DFX jest wszechstronny i elastyczny, idealny do:
-
Recepcja powitalna – Angażująca interakcja ludzka dla robotów usług publicznych
-
Bezobsługowy handel detaliczny – Zautomatyzowane chwytanie i obsługa obiektów dla rozwiązań detalicznych
Usługi budowlane – Obsługa narzędzi, zamków i urządzeń w utrzymaniu obiektów
-
Usługi rodzinne – Pomoc w zadaniach domowych i opiece
-
Pomoc dla osób starszych i niepełnosprawnych – Zapewnienie wsparcia z wysokim poziomem bezpieczeństwa i precyzji
-
Przemysły specjalne – Obsługa materiałów niebezpiecznych lub delikatnych w środowiskach przemysłowych
Najważniejsze informacje
-
Ludzka zręczność dla realistycznej i precyzyjnej interakcji
-
Wysoka niezawodność dla ciągłej pracy w wymagających scenariuszach
-
Wsparcie badań, usług i integracji przemysłowej z łatwymi protokołami komunikacyjnymi
Szczegóły


Zręczna ręka robota z 6 stopniami swobody, 6 liniowymi siłownikami, mocnym chwytem do 5KG, kontrolą siły i pozycji oraz wszechstronnymi zastosowaniami w robotyce, protezach, automatyzacji i badaniach.

Zręczna ręka robota z 6 DOF, 12 stawami, powtarzalnością submilimetrową, w rzeczywistym rozmiarze, czujnikiem siły i nośnością wielokilogramową.
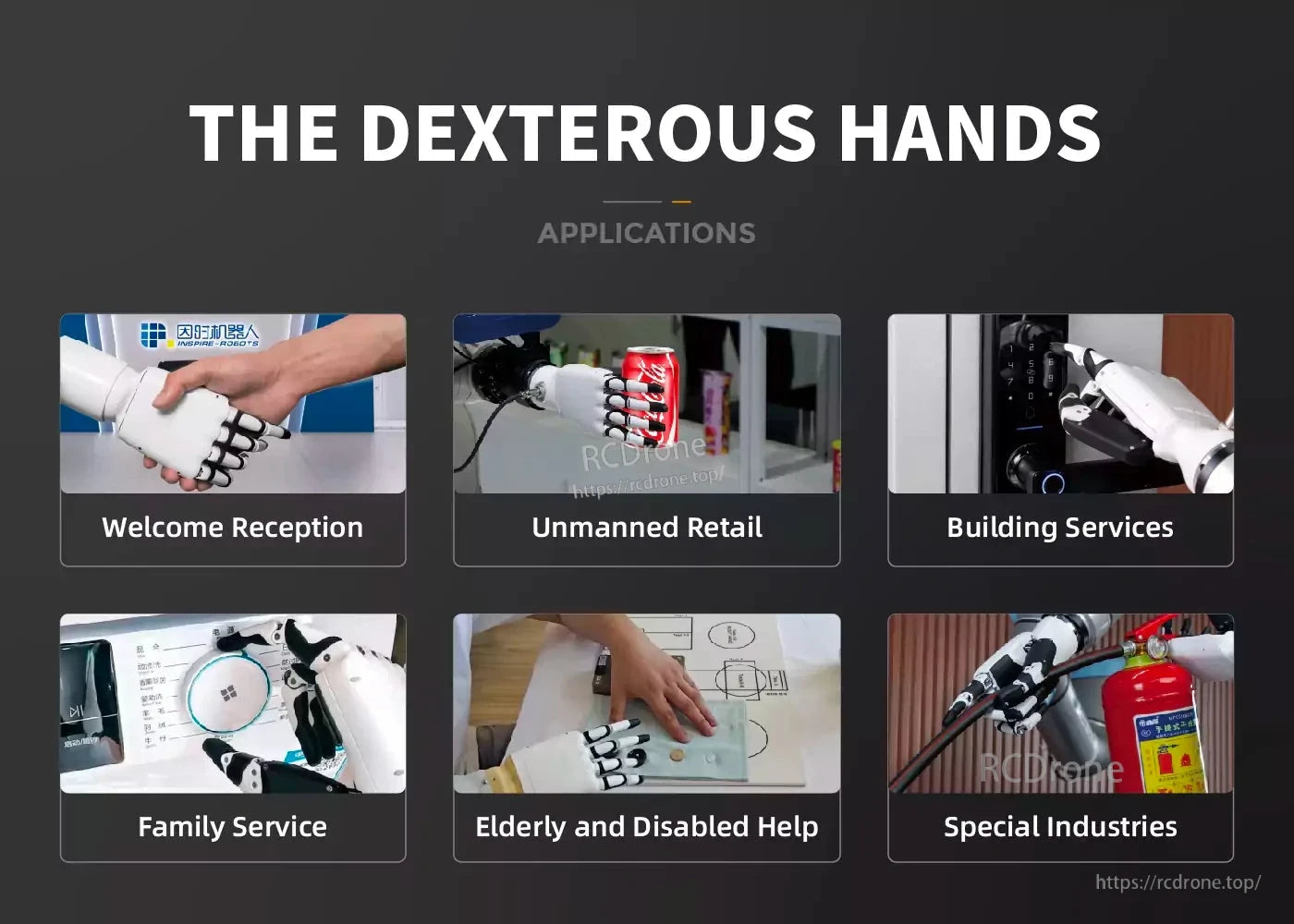
Zastosowania zręcznej ręki robota: recepcja, handel detaliczny, usługi budowlane, opieka nad rodziną, pomoc dla osób starszych, przemysły specjalne.
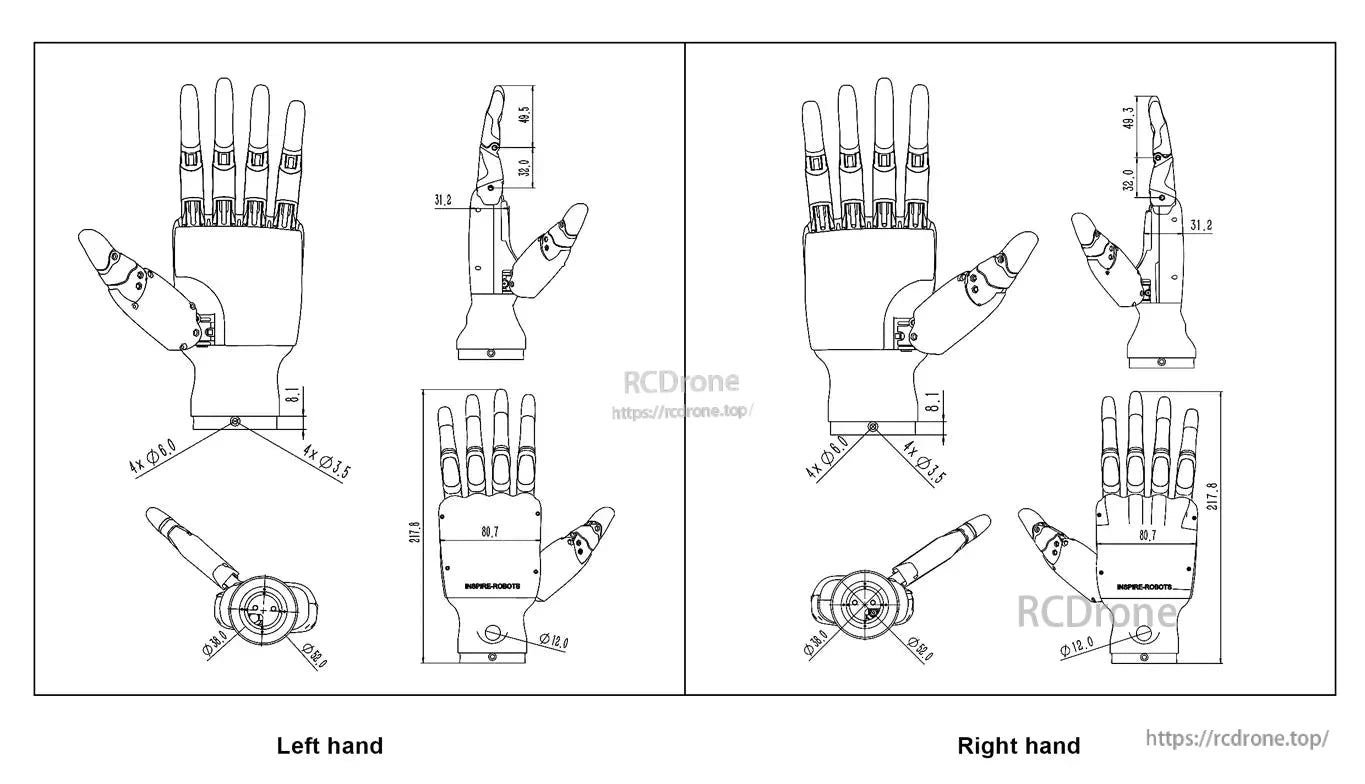
Inspire Robots techniczny rysunek zręcznej ręki robota RH56DFX z wymiarami

Related Collections



