

Silnik robota JUXIE INTELLIGENT CE-HM-R120, 48 V, 51:1/101:1/161:1, do 600 Nm, podwójne enkodery, EtherCAT/CAN
Silnik robota JUXIE INTELLIGENT CE-HM-R120, 48 V, 51:1/101:1/161:1, do 600 Nm, podwójne enkodery, EtherCAT/CAN
JUXIE INTELLIGENT
Nie można załadować gotowości do odbioru
Przegląd
Seria JUXIE INTELLIGENT CE-HM-R120 to platforma silników robotycznych o wysokim momencie obrotowym, przeznaczona do robotyki humanoidalnej i mobilnej. Seria oferuje wiele konfiguracji przekładni (51:1, 101:1, 161:1) oraz wariant o wysokiej mocy CE-HM-R120Max. Integruje podwójne enkodery (19-bitowe jednoobrotowe) oraz sterownik EtherCAT/CAN z pętlą prądową 50KHz i pętlą prędkości 10KHz. Typowe zastosowania obejmują stawy ramion, bioder i talii w robotach humanoidalnych oraz ramionach robotycznych, o kompaktowych wymiarach R120*78.5mm lub R120*100mm oraz całkowitej wadze od 2.5kg do 4kg.
Kluczowe cechy
- Konfiguracje: 51:1, 101:1, 161:1; CE-HM-R120Max przy 161:1.
- Nominalny moment obrotowy do 300 Nm; moment szczytowy do 600 Nm.
- Niskie luz: 15 arcsec (warianty R120), 30 arcsec (R120Max).
- Podwójne enkodery z jednoobrotowym absolutnym 19-bitowym na obrót.
- Interfejs sterownika: EtherCAT/CAN; pętla prądowa 50KHz; pętla prędkości 10KHz.
- Napięcie znamionowe 48 V; moc znamionowa do 1166,4 W.
- Kompaktowe wymiary R120*78,5mm lub R120*100mm; waga od 2,5kg do 4kg.
- Dowody w postaci widoku eksplodowanego wskazują na reduktor harmoniczny, silnik momentu obrotowego bezramowy oraz w pełni pusty wał w całej serii.
Specyfikacje
| Parametr | CE-HM-R120 (51:1) | CE-HM-R120 (101:1) | CE-HM-R120 (161:1) | CE-HM-R120Max (161:1) |
|---|---|---|---|---|
| Prędkość wyjściowa (RPM) | 49 | 20 | 12 | 11 |
| Moment nominalny (Nm) | 66 | 131 | 200 | 300 |
| Moment szczytowy (Nm) | 165 | 300 | 500 | 600 |
| Luzy (arcsec) | 15 | 15 | 15 | 30 |
| Napięcie nominalne (V) | 48 | 48 | 48 | 48 |
| Moc nominalna (W) | 732 | 732 | 732 | 1166.4 |
| Ocena prędkości (RPM) | 3500 | 3500 | 3500 | 1800 |
| Ocena prądu (A) | 15 | 15 | 15 | 24.3 |
| Prąd szczytowy (A) | 45 | 45 | 45 | 93 |
| Enkoder | Podwójne enkodery; absolutny enkoder jednego obrotu 19-bit na obrót | Podwójne enkodery; absolutny enkoder jednego obrotu 19-bit na obrót | Podwójne enkodery; absolutny enkoder jednego obrotu 19-bit na obrót | Podwójne enkodery; absolutny enkoder jednego obrotu 19-bit na obrót |
| Sterownik | Interfejs: EtherCAT/CAN; Pętla prądowa: 50KHz; Pętla prędkości: 10KHz | Interfejs: EtherCAT/CAN; Pętla prądowa: 50KHz; Pętla prędkości: 10KHz | Interfejs: EtherCAT/CAN; Pętla prądowa: 50KHz; Pętla prędkości: 10KHz | Interfejs: EtherCAT/CAN; Pętla prądowa: 50KHz; Pętla prędkości: 10KHz |
| Wymiary całkowite | R120*78.5mm | R120*78.5mm | R120*78.5mm | R120*100mm |
| Całkowita waga | 2.5kg | 2.5kg | 2.5kg | 4kg |
| Typowe zastosowania | Staw barkowy, staw biodrowy, staw w talii | Staw barkowy, staw biodrowy, staw w talii | Staw barkowy, staw biodrowy, staw w talii | Staw barkowy, staw biodrowy, staw w talii |
Zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Podręczniki
Specyfikacja komunikacji szeregowej (SC-0090-C001)
Diagram struktury produktu HM-R120 (PDF)
Szczegóły
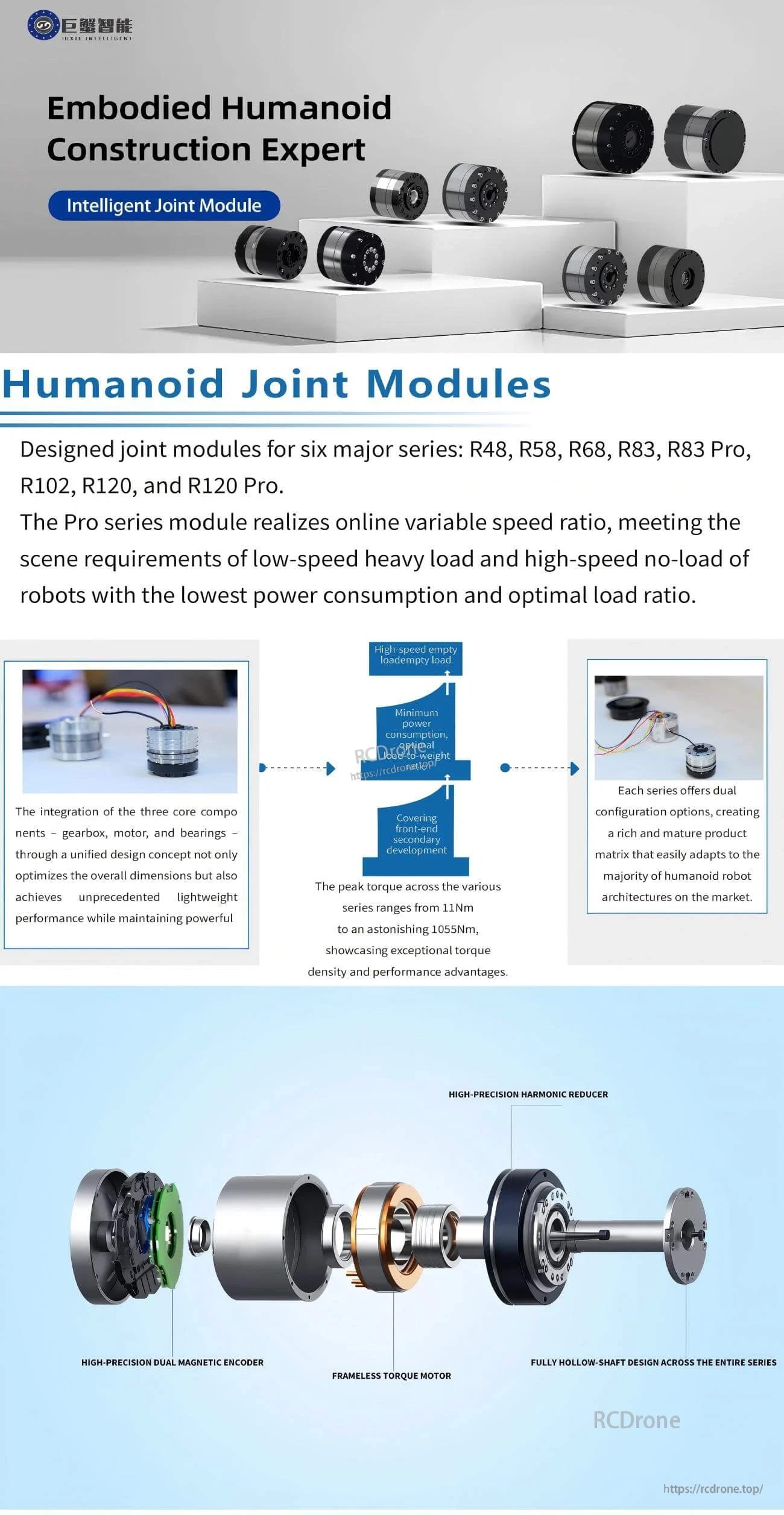
Moduły stawów humanoidalnych dla serii R48, R58, R68, R83, R83 Pro, R102, R120 i R120 Pro. Cechy obejmują wysokoprecyzyjny reduktor harmoniczny, podwójny enkoder magnetyczny, silnik momentowy bezramowy oraz w pełni pusty projekt wału.Oferuje zmienny stosunek prędkości, niskie zużycie energii oraz wysoką gęstość momentu obrotowego.


Related Collections

