

JUXIE INTELLIGENT CE-HM-R58 58 mm, 51:1/101:1, 48 V 95 W, 19-bitowe podwójne enkodery EtherCAT/CAN silnik do robota
JUXIE INTELLIGENT CE-HM-R58 58 mm, 51:1/101:1, 48 V 95 W, 19-bitowe podwójne enkodery EtherCAT/CAN silnik do robota
JUXIE INTELLIGENT
Nie można załadować gotowości do odbioru
Przegląd
Seria JUXIE INTELLIGENT CE-HM-R58 to kompaktowy moduł stawowy silnika robota przeznaczony do robotyki humanoidalnej i przemysłowej. Moduł R58 integruje reduktor harmoniczny, silnik momentu bezramowego oraz podwójne enkodery magnetyczne w konstrukcji z pustym wałem, aby zapewnić precyzyjny ruch dla stawów głowy, nadgarstka i łokcia. Komunikacja i kontrola są wspierane przez EtherCAT lub CAN dla łatwej integracji.
Kluczowe cechy
- Zintegrowany reduktor harmoniczny, silnik momentu bezramowego oraz wysokoprecyzyjny podwójny enkoder magnetyczny.
- Konstrukcja mechaniczna z pustym wałem w całej serii.
- Twoje konfiguracje: 51:1 i 101:1 stosunek wyjściowy.
- Prędkość wyjściowa 60 RPM (51:1) lub 30 RPM (101:1).
- Moment nominalny 10 Nm (51:1) lub 20 Nm (101:1); moment szczytowy 25 Nm lub 45 Nm.
- Luźność 15 arcsec.
- Zasilanie 48 V, moc nominalna 95 W, nominalna prędkość silnika 3000 RPM.
- Podwójne enkodery z absolutną wartością jednego obrotu: 19-bitów na obrót.
- Interfejs sterownika: EtherCAT/CAN; pętla prądowa 50 kHz; pętla prędkości 10 kHz.
- Typowe parametry fizyczne modułu R58: średnica zewnętrzna 58 mm, długość 55,1 mm, waga 0,43 kg, maksymalna prędkość 90 RPM, interfejs EtherCAT/CAN.
Specyfikacje
| Parametr | 51:1 | 101:1 |
|---|---|---|
| Konfiguracja | 51:1 | 101:1 |
| Prędkość wyjściowa (RPM) | 60 | 30 |
| Moment nominalny (Nm) | 10 | 20 |
| Moment szczytowy (Nm) | 25 | 45 |
| Luzy (Arcsec) | 15 | 15 |
| Napięcie nominalne (V) | 48 | 48 |
| Moc nominalna (W) | 95 | 95 |
| Prędkość nominalna (RPM) | 3000 | 3000 |
| Prąd nominalny (A) | 3.5 | 3.5 |
| Prąd szczytowy (A) | 10 | 10 |
| Enkoder | Podwójne enkodery; wartość bezwzględna jednego obrotu: 19-bit na obrót | Podwójne enkodery; wartość bezwzględna jednego obrotu: 19-bit na obrót |
| Sterownik | Interfejs: EtherCAT/CAN; pętla prądowa: 50 kHz; pętla prędkości: 10 kHz | Interfejs: EtherCAT/CAN; pętla prądowa: 50 kHz; pętla prędkości: 10 kHz |
| Wymiary całkowite | Średnica zewnętrzna 58 mm; długość 55,1 mm | Średnica zewnętrzna 58 mm; długość 55,1 mm |
| Całkowita waga | 0,43 kg | 0.43 kg |
| Typowe zastosowania | Głowa, stawy nadgarstka, staw łokciowy | Głowa, stawy nadgarstka, staw łokciowy |
Zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Podręczniki
Szczegóły
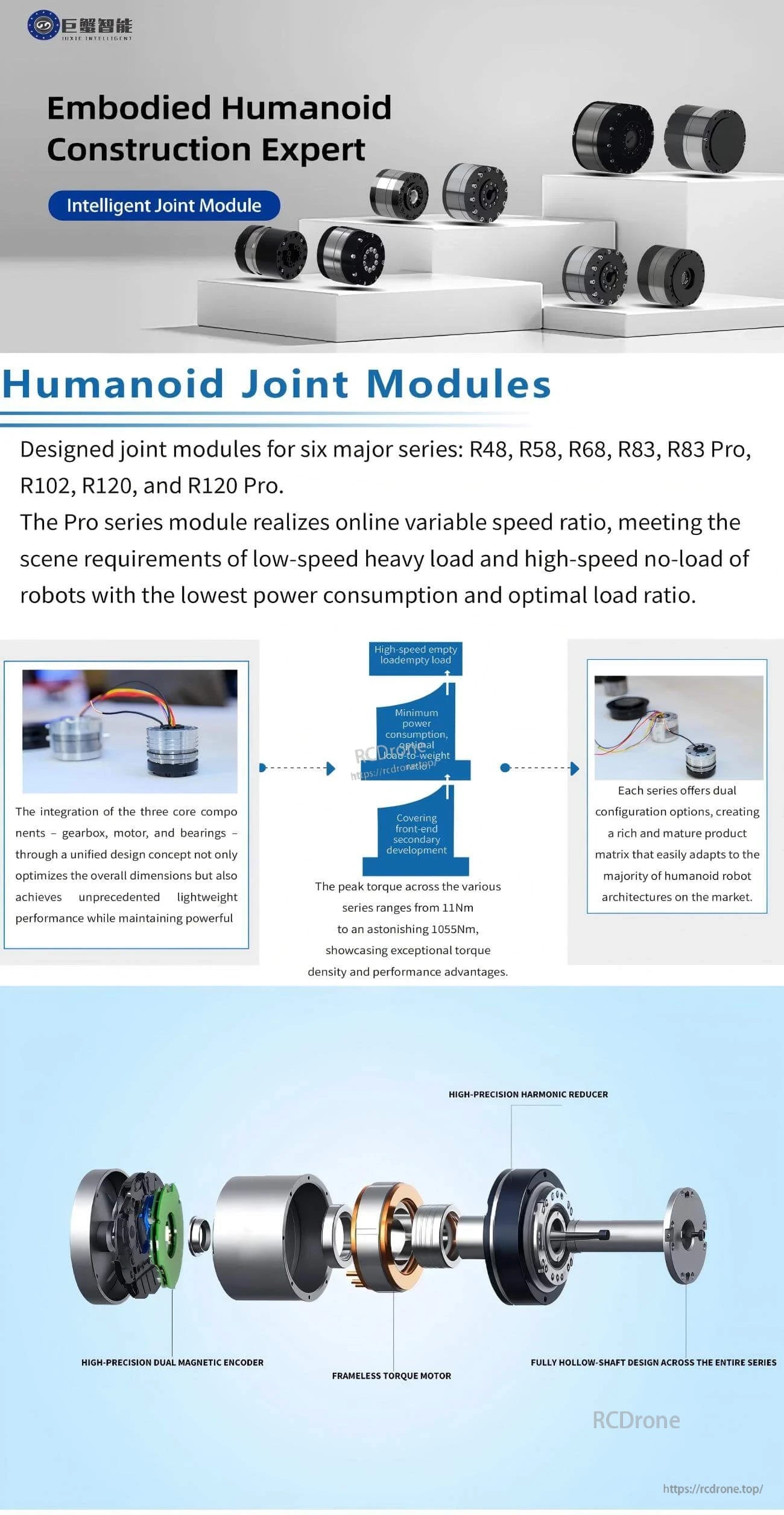
Inteligentne moduły stawowe dla robotów humanoidalnych, charakteryzujące się wysokoprecyzyjnym reduktorem harmonicznym, podwójnym enkoderem magnetycznym, silnikiem momentu obrotowego bezramowym oraz konstrukcją z pustym wałem. Oferują zmienny stosunek prędkości, niskie zużycie energii oraz maksymalny moment obrotowy do 1055Nm.

Seria R48: średnica 48mm, długość 51.5mm, 0.32kg, moment obrotowy 4Nm, 100 PRM, EtherCAT/CAN. Seria R58: średnica 58mm, długość 55.1mm, 0.43kg, 8Nm moment obrotowy, 90 PRM, EtherCAT/CAN. Seria R68: 68mm średnicy, 54.3mm długości, 0.7kg, 5Nm moment obrotowy, 90 PRM, EtherCAT/CAN.

Related Collections

