

JUXIE INTELLIGENT CE-HM-R68 Seria, 48 V 175 W, 51:1/101:1, 17/33 Nm, 19-bitowy podwójny enkoder, silnik do robotycznych przegubów
JUXIE INTELLIGENT CE-HM-R68 Seria, 48 V 175 W, 51:1/101:1, 17/33 Nm, 19-bitowy podwójny enkoder, silnik do robotycznych przegubów
JUXIE INTELLIGENT
Nie można załadować gotowości do odbioru
Przegląd
Seria JUXIE INTELLIGENT CE-HM-R68 to kompaktowy silnik robota i moduł stawowy zaprojektowany do robotyki humanoidalnej i mobilnej. Integruje napęd serwo 48 V, podwójne enkodery oraz przełożenia 51:1 lub 101:1, aby dostarczyć moment obrotowy do 33 Nm oraz moment szczytowy do 82 Nm dla stawów robotycznych.
Kluczowe cechy
- Twoje konfiguracje: przełożenia 51:1 i 101:1
- Nominalna prędkość wyjściowa: 60 RPM (51:1), 30 RPM (101:1)
- Nominalny moment obrotowy: 17 Nm (51:1), 33 Nm (101:1); moment szczytowy do 41/82 Nm
- Niski luz: 15 arcsec
- Serwo 48 V, 175 W z nominalną prędkością silnika 3000 RPM
- Podwójne enkodery z absolutną rozdzielczością 19-bit w jednym obrocie
- Interfejsy: EtherCAT/CAN; pętle sterujące: prąd 50 kHz, prędkość 10 kHz
- Kompaktowy rozmiar R68 x 66,3 mm; waga 0.8 kg
- Odpowiedni do stawów ramion, łokci, kolan i talii humanoidalnego robota
Specyfikacje
| Parametr | 51:1 | 101:1 |
|---|---|---|
| Prędkość wyjściowa (RPM) | 60 | 30 |
| Moment nominalny (Nm) | 17 | 33 |
| Moment szczytowy (Nm) | 41 | 82 |
| Luzy (arcsec) | 15 | 15 |
| Napięcie nominalne (V) | 48 | 48 |
| Moc nominalna (W) | 175 | 175 |
| Nominalna prędkość silnika (RPM) | 3000 | 3000 |
| Nominalny prąd (A) | 5.5 | 5.5 |
| Prąd szczytowy (A) | 16 | 16 |
| Enkoder | Podwójne enkodery; absolutny 19-bitowy enkoder jednorotacyjny | |
| Interfejs sterownika | EtherCAT/CAN | |
| Pętle kontrolne | Pętla prądowa 50 kHz; pętla prędkości 10 kHz | |
| Wymiary całkowite | R68 x 66.3 mm | |
| Całkowita waga | 0.8 kg | |
| Typowe zastosowania stawów | Ramie, Łokieć, Kolano, Talia | |
Zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonogie
- Pojazdy AGV
- Roboty ARU
Podręczniki
Szczegóły
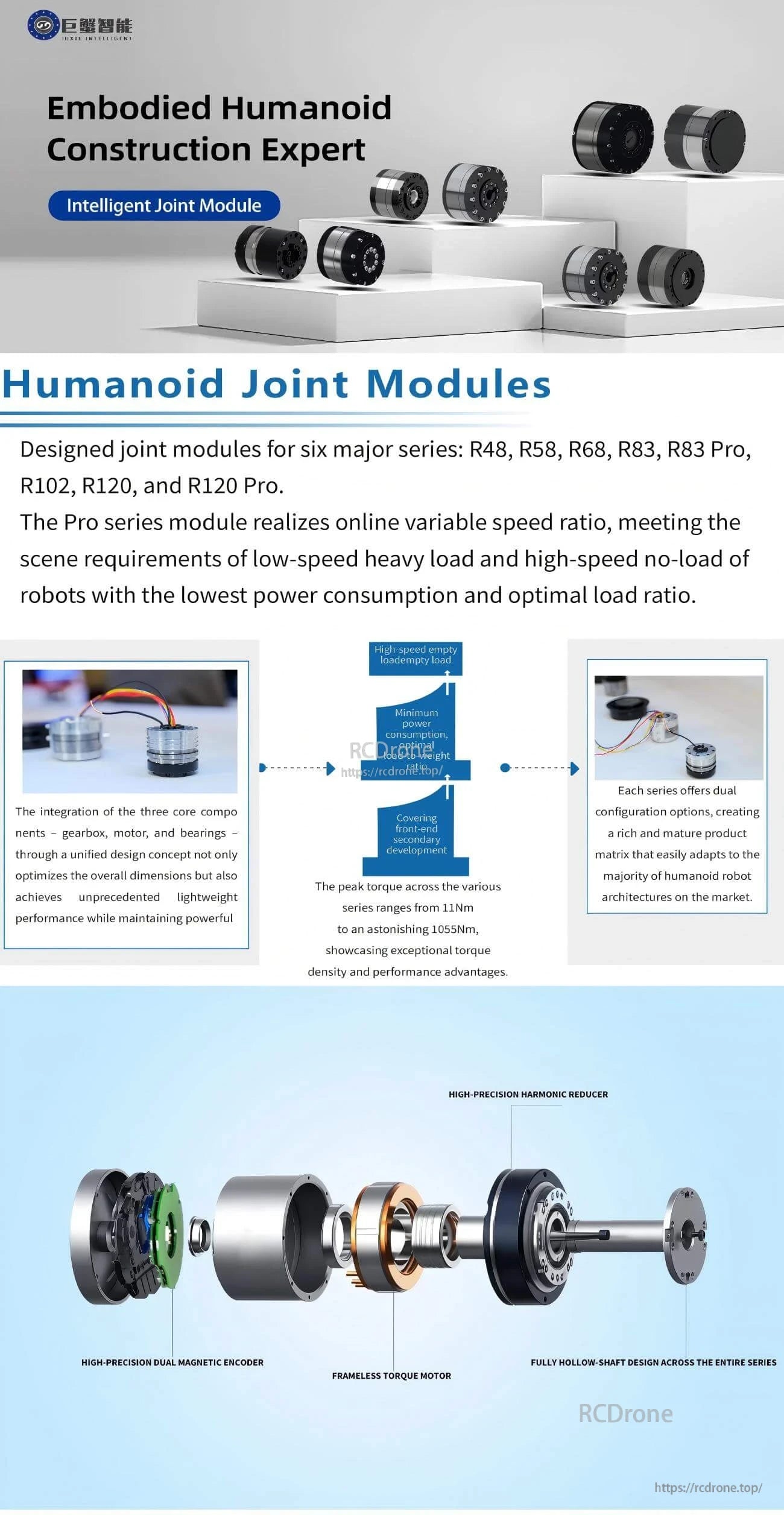
Moduły stawowe humanoidalne dla serii R48, R58, R68, R83, R83 Pro, R102, R120 i R120 Pro. Cechy obejmują wysokoprecyzyjny reduktor harmoniczny, podwójny enkoder magnetyczny, silnik momentu obrotowego bezramowy oraz w pełni pusty projekt wału. Oferuje zmienny stosunek prędkości, niskie zużycie energii i wysoką gęstość momentu obrotowego.

Trzy serie silników robotycznych: R48 (średnica 48mm, moment obrotowy 4Nm, 100 PRM), R58 (średnica 58mm, moment obrotowy 8Nm, 90 PRM), R68 (średnica 68mm, moment obrotowy 5Nm, 90 PRM). Wszystkie posiadają interfejs EtherCAT/CAN.

Related Collections

