













LINKERBOT Linker Hand L10 Ręka Robota, 10 DoF, Sterowanie CAN/RS485, Napęd Ślimakowy, Uchwyt 80N, DC24V+/-10%
LINKERBOT Linker Hand L10 Ręka Robota, 10 DoF, Sterowanie CAN/RS485, Napęd Ślimakowy, Uchwyt 80N, DC24V+/-10%
LINKERBOT
Nie można załadować gotowości do odbioru
Przegląd
LINKERBOT Linker Hand L10 to robotyczna dłoń zaprojektowana do zręcznej manipulacji i precyzyjnej kontroli. Posiada 10 stopni swobody z przekładnią ślimakową i komunikuje się za pomocą CAN/RS485, co zapewnia niezawodną integrację z systemami badawczymi i przemysłowymi.
Kluczowe cechy
- 10 DoF zręczna dłoń z przekładnią ślimakową dla stabilnego działania.
- Interfejsy sterujące: CAN i RS485.
- Dokładność powtarzalnego pozycjonowania < +/-0.2mm; typowy czas otwierania/zamykania 1.2s.
- Możliwość siły: maksymalna siła palca kciuka 15N, maksymalna siła palca czterech palców 15N, maksymalna siła chwytu pięciu palców 80N.
- Tryby sterowania i narzędzia z podręcznika produktu: kontrola pozycji, kontrola prędkości, sprzężenie zwrotne haptyczne (kontrola siły) za pomocą czujników na końcówkach palców oraz aktualizacja oprogramowania układowego online.
- Ekosystem (materiały per produkt): wspierane ramiona robotyczne UR, Franka, XArm, RealMan, AgileX; wspierane symulatory Pybullet, Isaac, MuJoCo; przykłady zastosowania obejmują ROS1, ROS2, Python, C++; metody pozyskiwania danych obejmują rękawice teleoperacyjne, rękawice egzoszkieletowe, rękawice z czujnikami cieczy metalowej, wizję i VR (Meta Quest 3).
Aby uzyskać wsparcie przed sprzedażą lub integracją, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Specyfikacje
| Stopnie swobody (DoF) | 10 |
| Liczba stawów | 20 (10 aktywnych + 10 pasywnych) |
| Tryb transmisji | Transmisja zębatkowa |
| Interfejs sterowania | CAN/RS485 |
| Waga | 800g |
| Maksymalne obciążenie | 25kg |
| Napięcie robocze | DC24V+/-10% |
| Prąd statyczny | 0.2A |
| Średni prąd (ruch bez obciążenia) | 0.5A |
| Maksymalny prąd | 3A |
| Dokładność powtarzalności pozycjonowania | < +/-0.2mm |
| Czas otwierania/zamykania | 1.2s |
| Maksymalna siła palca kciuka | 15N |
| Maksymalna siła palców czterech palców | 15N |
| Maksymalna siła chwytu pięciu palców | 80N |
Czujnik ciśnienia
| Układ piezorezystywny | 6*12 |
| Powierzchnia nośna czujnika | 9.6*14.4mm |
| Siła wyzwolenia | 5g |
| Zakres pomiaru | 20N |
| Żywotność | 100 000 cykli |
| Wskaźnik komunikacji | 200FPS |
Czujnik pojemnościowy (opcjonalnie)
| Częstotliwość próbkowania | >=50Hz |
| Zakres pomiaru | 0-30N |
| Limit przeciążenia | 60N |
| Wrażliwość na ciśnienie | 0.1N |
| Rozdzielczość pomiaru | 0.5%FS |
| Dokładność pomiaru | 2%FS |
| Rozdzielczość ciśnienia | 0.25N |
| Rozdzielczość kierunku | 45° |
| Odległość detekcji | 1cm (Metal, Ciało ludzkie) |
Co jest w zestawie
- Kabel debugujący USB-to-CAN x1
- Kabel łączący XT30 (2+2) x1
- Zasilacz x1
- Kabel zasilający x1
- Linker Hand L10 x1
Aplikacje
- Badania i edukacja w zakresie zręcznej manipulacji z użyciem ROS1/ROS2 oraz symulatorów (Pybullet, Isaac, MuJoCo).
- Teleoperacja za pomocą rękawic, rękawic egzoszkieletowych, rękawic z płynnego metalu, wizji i VR (Meta Quest 3).
- Precyzyjny montaż, operacje oparte na ścieżkach, dokręcanie śrub, chwytanie cienkich arkuszy i ogólne manipulowanie obiektami.
Podręczniki
Linker_Hand_L10_Product_Manual.pdf
Szczegóły

Linker Hand L10 oferuje 10 DOF, precyzyjny ruch za pomocą mechanizmu łącznikowego i niestandardowych sterowników silników. Obsługuje UR, Franka, ROS, Python, VR, Pybullet, CAN i inne, co umożliwia wszechstronną integrację i kontrolę robotów.
Linker Hand L10 zapewnia wysoką zręczność, z każdym palcem oferującym 4 stopnie swobody dla precyzyjnych operacji. Jego system wielosensorowy - wyposażony w kamery i e-skórę - zapewnia kompleksową świadomość otoczenia i adaptacyjną interakcję. Dzięki integracji z chmurą, użytkownicy mogą szybko wdrożyć rękę za pomocą usługi chmurowej biblioteki umiejętności bez kodowania, co umożliwia efektywną personalizację przy jednoczesnym zmniejszeniu złożoności operacyjnej. Te możliwości wspierają szeroki zakres złożonych aplikacji, zwiększając zarówno precyzję, jak i łatwość użycia bez potrzeby rozbudowanego programowania czy konfiguracji.

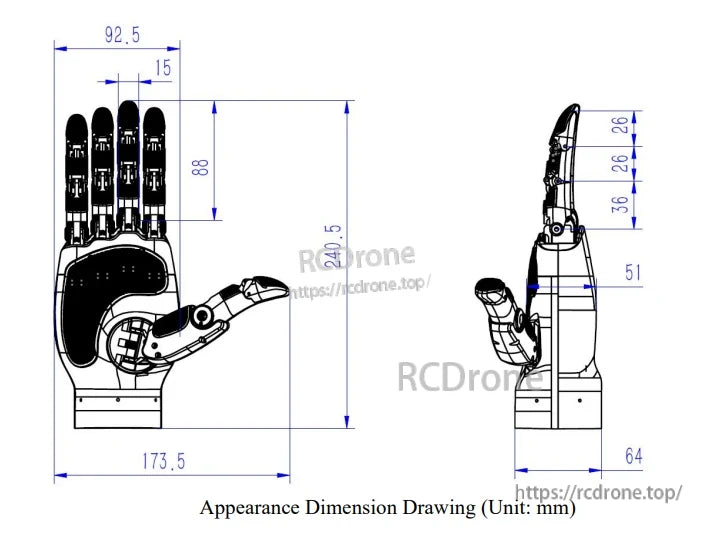
Wymiary ręki robota w milimetrach, pokazujące widoki z przodu i z boku z dokładnymi pomiarami do projektowania i montażu.
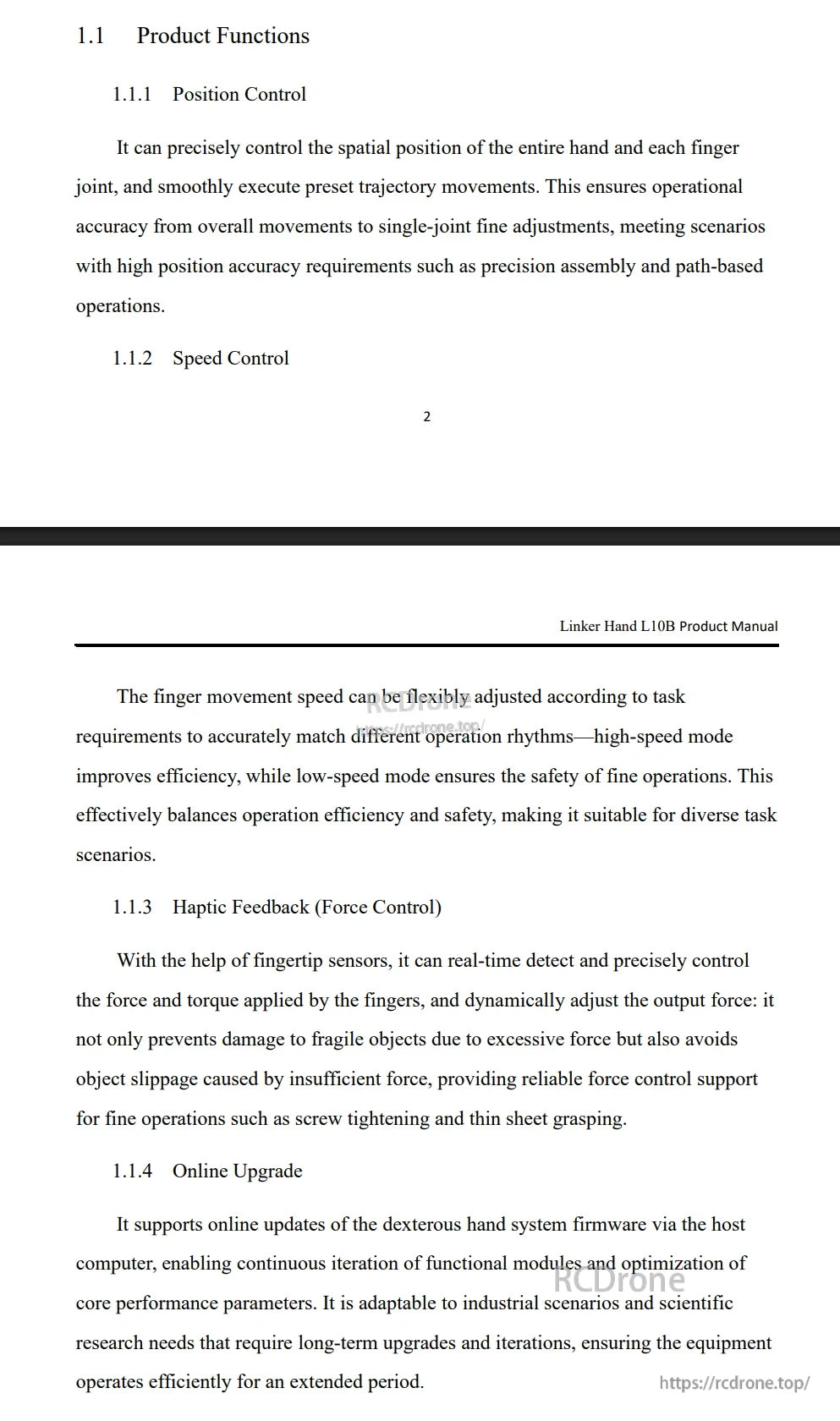
Linker Hand L10B oferuje precyzyjną kontrolę pozycji i prędkości, sprzężenie zwrotne haptyczne do zarządzania siłą oraz aktualizacje oprogramowania online. Zaprojektowany z myślą o dokładności, bezpieczeństwie i elastyczności w zastosowaniach przemysłowych i badawczych wymagających precyzyjnej manipulacji i długoterminowej wydajności.
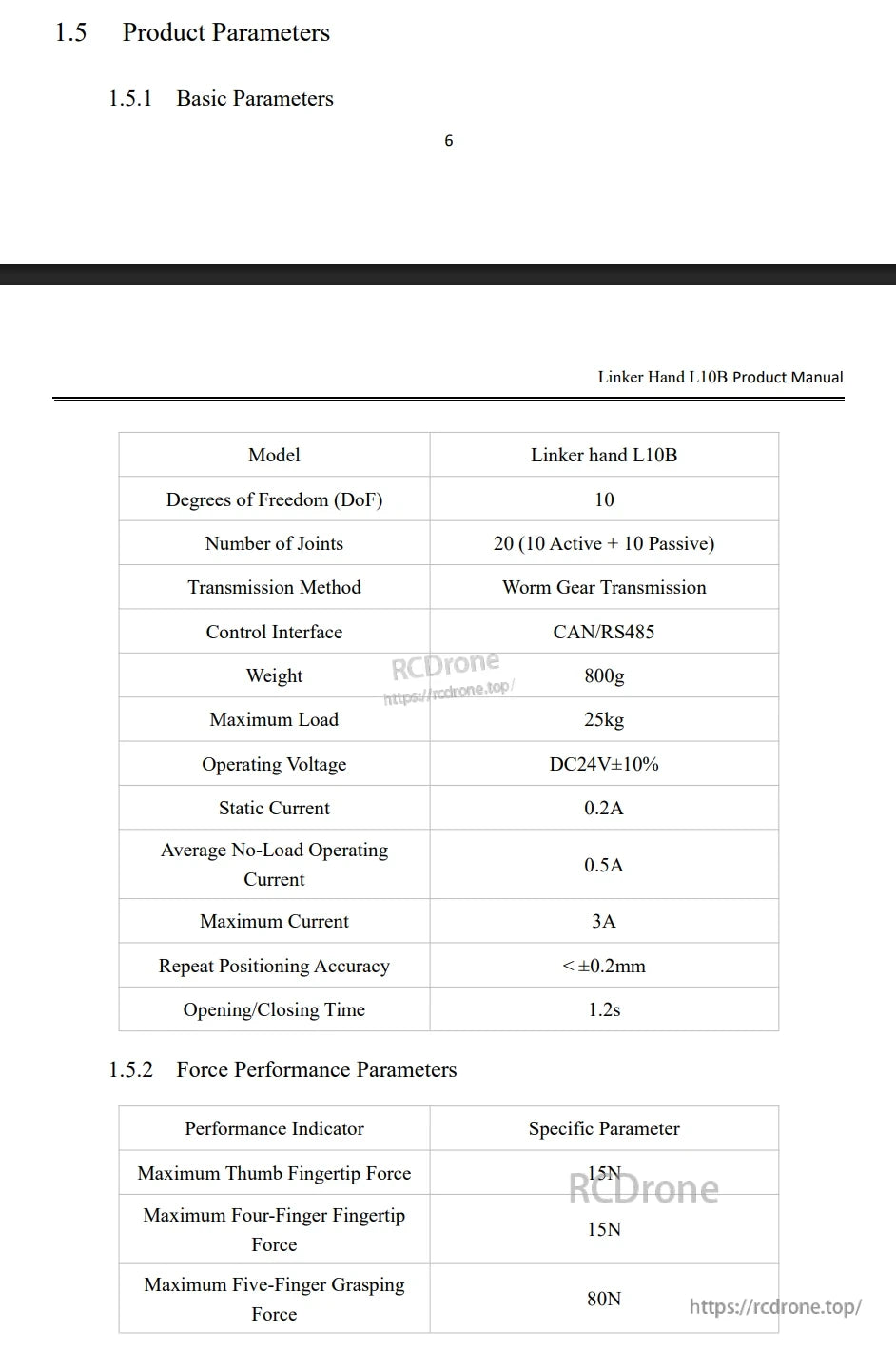
Linker Hand L10B oferuje 10 DoF, 20 stawów, przekładnię ślimakową oraz kontrolę CAN/RS485. Ważąc 800g, obsługuje do 25kg przy DC24V, zapewniając precyzyjne pozycjonowanie i siły chwytu do 80N.

Wyposażony w matrycę piezorezystywną 6x12 (zakres 20N, 100k cykli). Opcjonalny czujnik pojemnościowy: ≥50Hz próbkowanie, zakres 0–30N, rozdzielczość kierunkowa 45°, wykrywa metal lub ciało ludzkie w odległości 1cm.
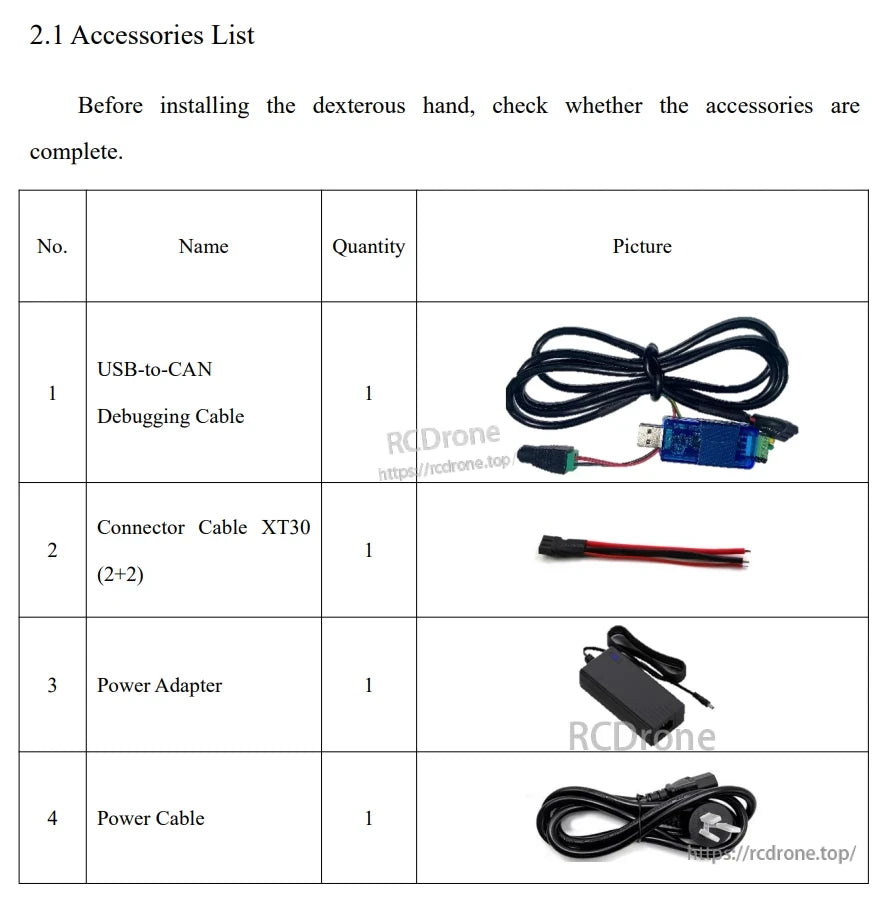
Lista akcesoriów do instalacji zręcznej ręki: kabel USB-do-CAN, złącze XT30, zasilacz oraz kabel zasilający, każdy w ilości jeden.
Related Collections













