







LINKERBOT Linker Hand L6 Ręka Robota, 6 DoF, CAN, Napęd Łącznikowy, Chwyt 50N, Powtarzalność ±0,2mm
LINKERBOT Linker Hand L6 Ręka Robota, 6 DoF, CAN, Napęd Łącznikowy, Chwyt 50N, Powtarzalność ±0,2mm
LINKERBOT
Nie można załadować gotowości do odbioru
Przegląd
LINKERBOT Linker Hand L6 to zręczna ręka robota zaprojektowana do precyzyjnej manipulacji. Posiada 6 stopni swobody (DoF) i 11 stawów (6 aktywnych + 5 pasywnych) z przekładnią łącznikową i interfejsem sterowania CAN. Struktura przedstawiona na zdjęciach produktu podkreśla metalowe palce, odporny na zużycie silikon na opuszkach palców, pięć czujników ciśnienia dotykowego, lampki wskaźnikowe, gumową podkładkę antyprzeciążeniową w połowie dłoni oraz napęd elektryczny o wysokiej precyzji.
Kluczowe cechy
- 6 DoF zręczna manipulacja; 11 stawów (6 aktywnych + 5 pasywnych).
- Przekładnia łącznikowa z kontrolą magistrali CAN.
- Dokładność powtarzalnego pozycjonowania: ±0,2 mm.
- Możliwości siłowe: maksymalna siła końcówki kciuka 10N; maksymalna siła końcówki czterech palców 8N; maksymalna siła chwytu pięciopalczastego 50N.
- Piezorezystywny pięciopalczasty czujnik dotykowy do pomiaru kontaktu/ciśnienia.
- Elementy projektowe pokazane: metalowe palce, odporne na zużycie silikonowe końcówki, światło wskaźnika, gumowa podkładka zapobiegająca przycięciu.
- Kompaktowy & zwinny układ; system wieloczujnikowy (w tym kamery i elektroniczna skóra) oraz integracja urządzenia z chmurą, jak pokazano na obrazach produktu.
Aby uzyskać wsparcie sprzedażowe i techniczne, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Specyfikacje
| Parametr | Wartość |
|---|---|
| Stopnie swobody (DoF) | 6 |
| Liczba stawów | 11 (6 aktywnych + 5 pasywnych) |
| Tryb transmisji | Transmisja połączeniowa |
| Interfejs sterowania | CAN |
| Waga | 623,5g |
| Maksymalne obciążenie | 28kg |
| Napięcie robocze | DC24V±10% |
| Prąd statyczny | 0,2A |
| Średni prąd (ruch bez obciążenia) | 0,75A |
| Maksymalny prąd | 1,4A |
| Dokładność powtarzalności pozycji | ±0.2mm |
| Maksymalna siła nacisku kciuka | 10N |
| Maksymalna siła nacisku czterech palców | 8N |
| Maksymalna siła chwytu pięciu palców | 50N |
Wydajność ruchu
| Część ruchoma | Zakres kąta (°) | Prędkość ruchu (°/s) |
|---|---|---|
| Podstawa kciuka | 57 | 152.82 |
| Podstawa palca wskazującego | 72.30 | 213.27 |
| Podstawa palca środkowego | 72.90 | 208.29 |
| Podstawa palca serdecznego | 73.10 | 202.49 |
| Podstawa palca małego | 72.60 | 201.11 |
| Wierzchołek kciuka | 69.90 | 192.84 |
| Tip of Index Finger | 64.60 | 192.84 |
| Tip of Middle Finger | 65.10 | 185.32 |
| Tip of Ring Finger | 66.90 | 185.32 |
| Tip of Little Finger | 66.70 | 184.76 |
| Side Swing of Thumb | 80 | 235.29 |
| Opening and Closing Time | - | 0.35s |
Czujniki
| Parametr | Specyfikacja |
|---|---|
| Układ piezorezystancyjny | 6*12 |
| Powierzchnia nośna czujnika | 9.6*14.4mm |
| Siła wyzwolenia | 5g |
| Zakres pomiaru | 20N |
| Żywotność | 100 000 cykli |
| Wskaźnik komunikacji | 200FPS |
| Zakres wartości | 0~4095 |
Wymiary zewnętrzne
| Definicja | Parametr (mm) |
|---|---|
| Długość od czubka palca środkowego do podstawy dłoni | 190.7 |
| Maksymalna szerokość dłoni | 121 |
| Długość od czubka kciuka do podstawy dłoni | 134.3 |
| Wysokość nadgarstka | 9.5 |
| Średnica nadgarstka | 60 |
Co jest w zestawie
- Kabel debugowania USB‑do‑CAN x1
- Kabel łączący XT30 (2+2) x1
- Adapter zasilania x1
- Kabel zasilający x1
- Linker Hand L6 x1
Zastosowania
- Precyzyjne chwytanie i obsługa obiektów
- Chwytanie i manipulacja narzędziami
- Zadania pick-and-place komponentów
Podręczniki
Podręcznik produktu Linker Hand L6 (PDF)
Szczegóły


Wysokowydajna, zręczna ręka robotyczna z 6 stopniami swobody. Oferuje kompaktową zwinność, system wielosensorowy oraz integrację z chmurą dla precyzyjnej kontroli, adaptacji do środowiska i dostosowywania bez kodu za pomocą biblioteki umiejętności w chmurze.



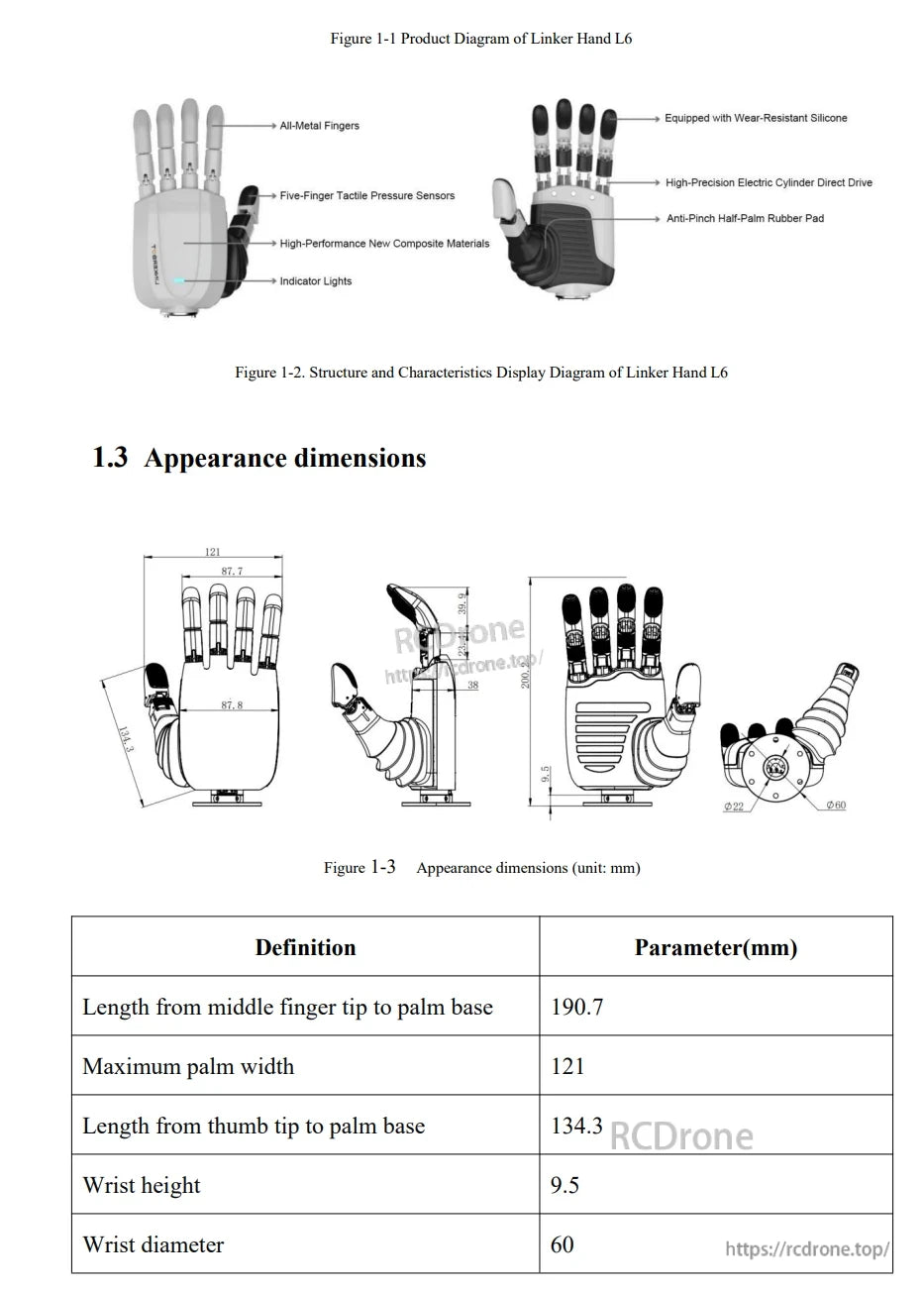
Linker Hand L6 ma metalowe palce, czujniki dotykowe, silikon odporny na zużycie, napęd elektryczny oraz gumową podkładkę zapobiegającą przycięciu. Długość palca: 190,7 mm; szerokość dłoni: 121 mm; średnica nadgarstka: 60 mm.
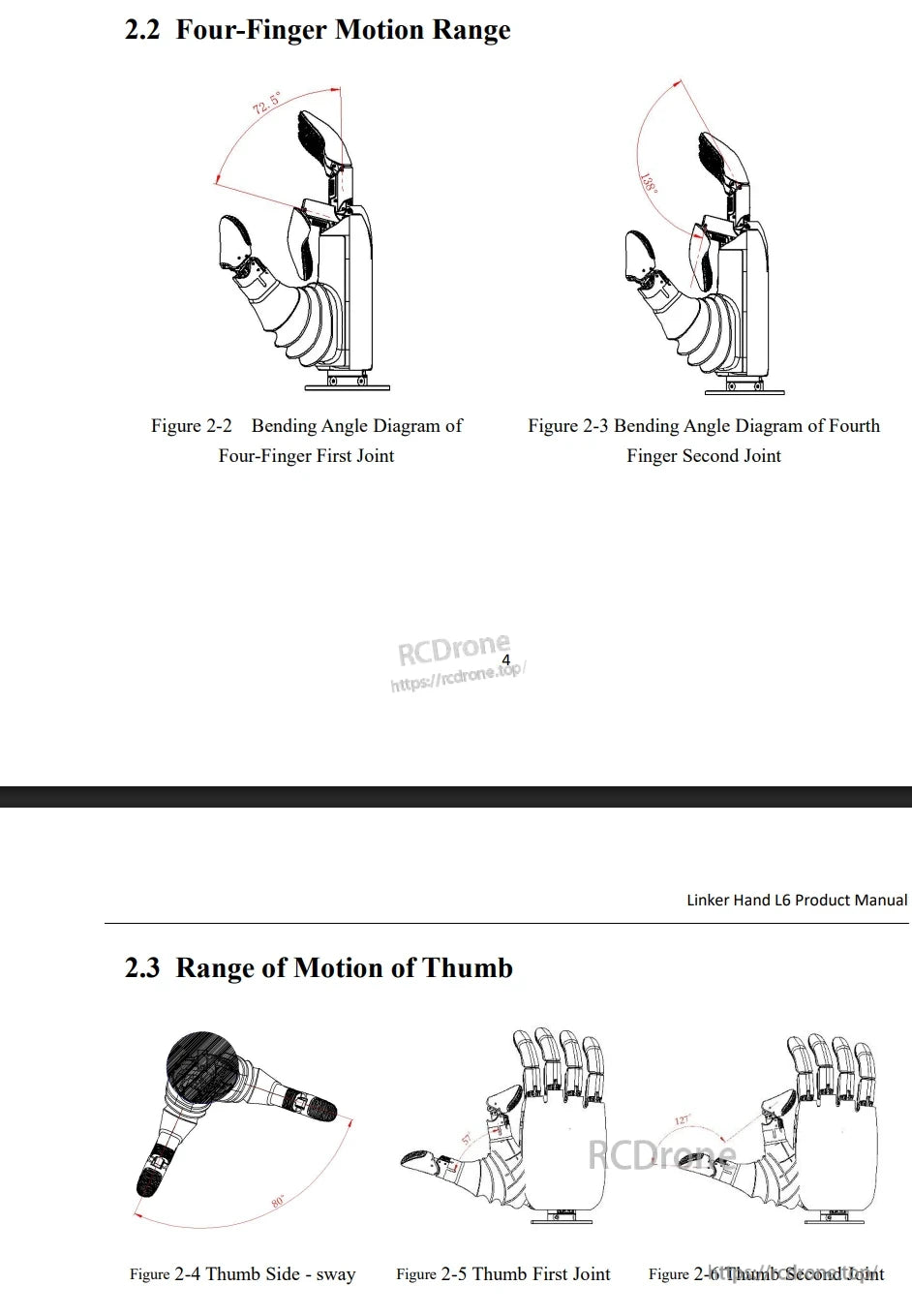
Zakres ruchu stawów palców i kciuka: pierwszy staw czterech palców 72,5°, drugi staw 138°; ruch boczny kciuka 80°, pierwszy staw 57°, drugi staw 127°.
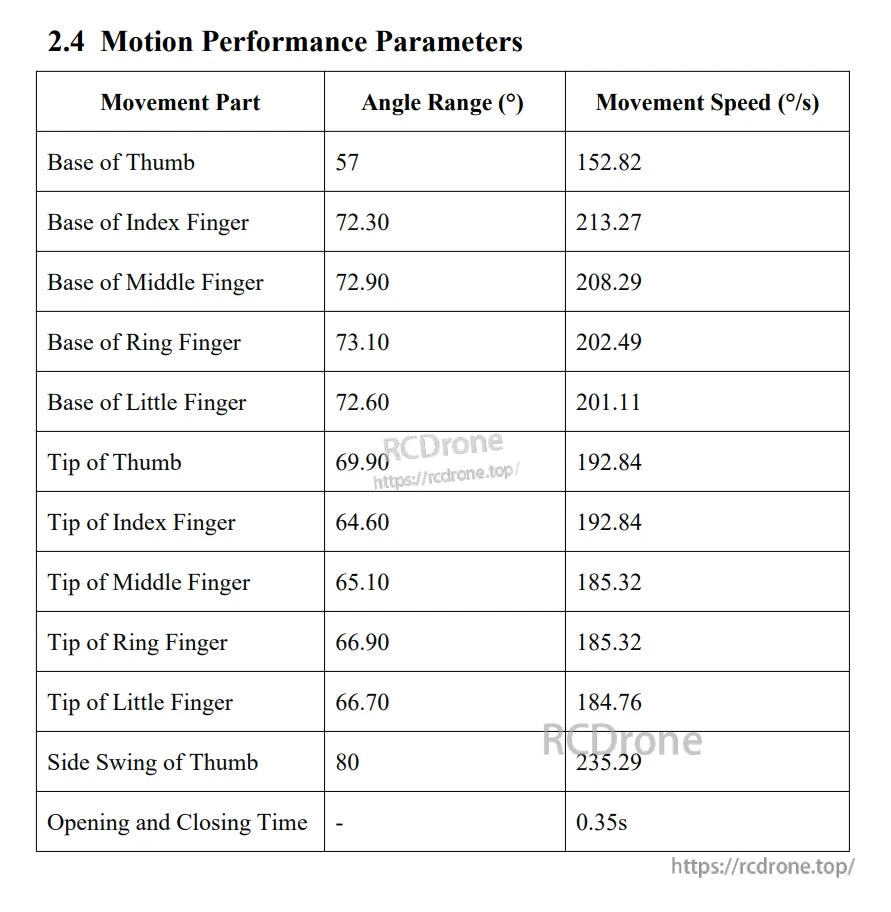
Parametry ruchu palców ręki robota: huśtawka kciuka przy 235,29°/s, otwieranie/zamykanie w 0,35 sekundy—precyzyjna artykulacja z szczegółowymi zakresami kątów stawowych i prędkościami.
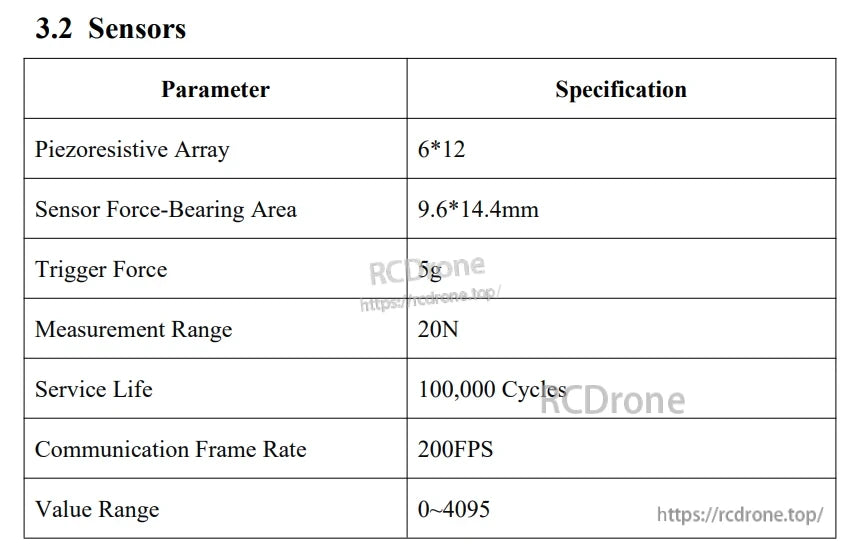
Specyfikacje czujników: układ 6x12, obszar 9,6x14,4 mm, wyzwalacz 5g, zakres 20N, 100k cykli, 200FPS, zakres wartości 0-4095.
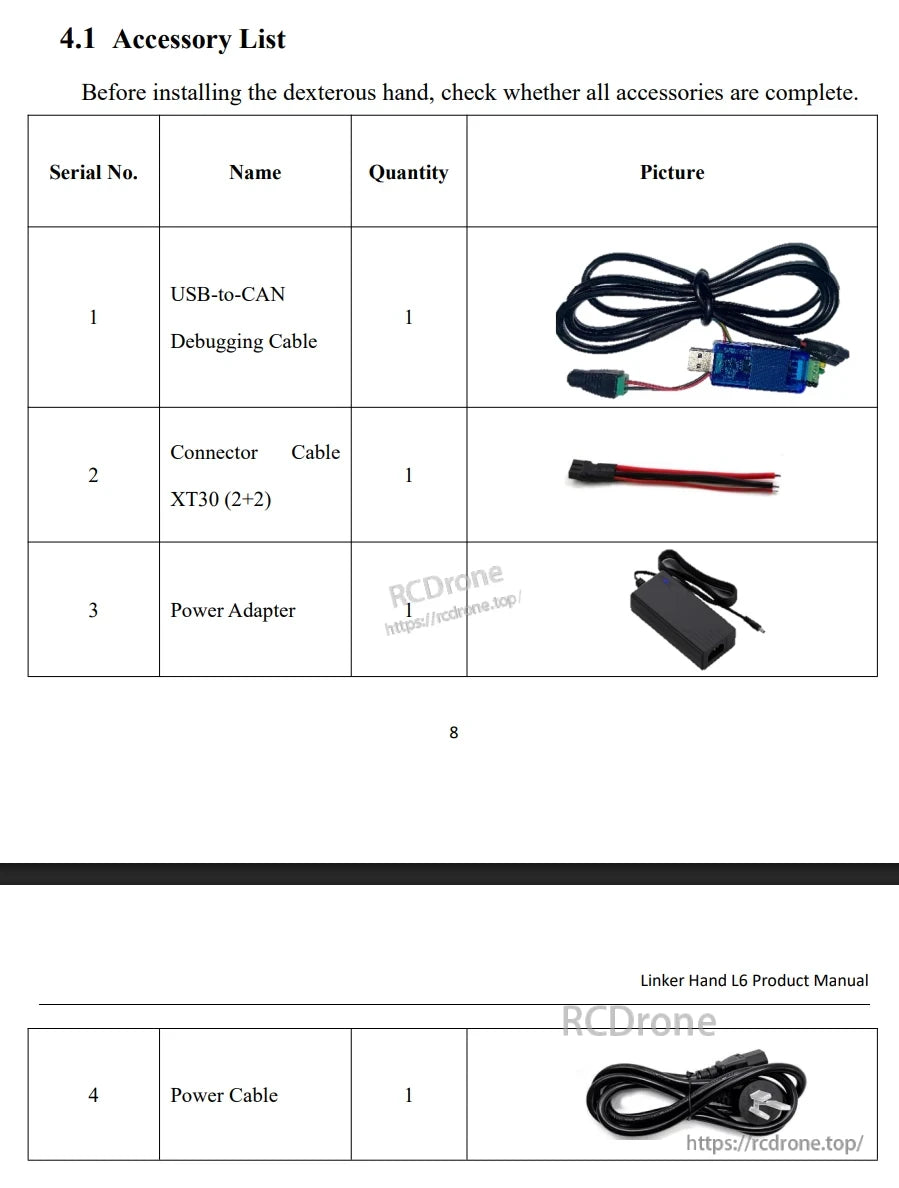
Lista akcesoriów dla Linker Hand L6: kabel USB-do-CAN, złącze XT30, zasilacz oraz kabel zasilający. Sprawdź kompletność przed instalacją.
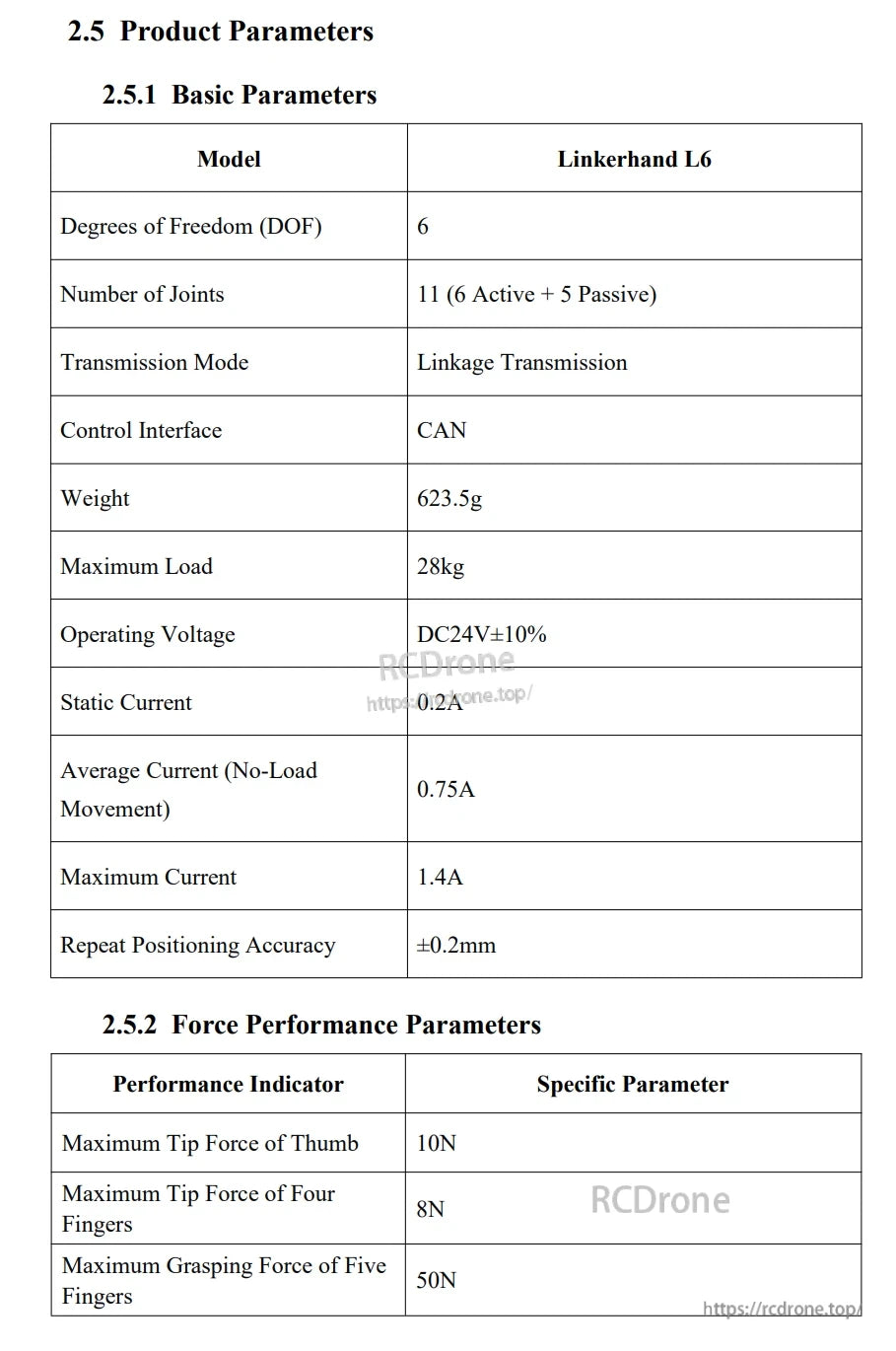
Robotyczna ręka Linkerhand L6 ma 6 DOF, 11 stawów, kontrolę CAN, waży 623,5 g, obsługuje maksymalne obciążenie 28 kg, działa na DC24V±10%, oferuje precyzję ±0,2 mm i zapewnia siłę chwytu do 50N.
Related Collections







