







LINKERBOT Linker Hand O6 Ręka Robota, 6 DoF, 11 przegubów, CAN/RS485, chwyt 130N, dokładność ±0,2mm, DC24V±10%
LINKERBOT Linker Hand O6 Ręka Robota, 6 DoF, 11 przegubów, CAN/RS485, chwyt 130N, dokładność ±0,2mm, DC24V±10%
LINKERBOT
Nie można załadować gotowości do odbioru
Przegląd
LINKERBOT Linker Hand O6 to robotyczna ręka zaprojektowana do kompaktowej integracji i precyzyjnej manipulacji. Oferuje 6 stopni swobody z 11 stawami (6 aktywnych + 5 pasywnych), przekładnię ślimakową dla stabilnego działania, kontrolę CAN/RS485 oraz opcjonalne czujniki dotykowe. Zręczna konstrukcja zapewnia do 130N siły chwytu pięcioma palcami z dokładnością powtarzalności ±0,2 mm przy napięciu roboczym DC24V±10%. Lekka konstrukcja 370g i mała powierzchnia wspierają obsługę logistyczną, montaż przemysłowy oraz scenariusze chwytania o nieregularnych kształtach.
Kluczowe cechy
Kompaktowy &i Zwinny
Kompaktowy projekt strukturalny zmniejsza obciążenie sprzętu, jednocześnie zwiększając elastyczność dla precyzyjnego chwytania w ciasnych przestrzeniach.
Wysoka trwałość
Wykonany z aluminium, co zapewnia lekkość, wytrzymałość i odporność na zużycie, wspierając długoterminową stabilną wydajność.
Integracja urządzenia z chmurą
Integracja urządzenia z chmurą umożliwia szybkie wdrożenie za pomocą chmurowej biblioteki umiejętności z uproszczoną obsługą i dostosowaniem.
Specyfikacje
| Model | LINKERBOT Linker Hand O6 |
| Stopnie swobody (DoF) | 6 |
| Liczba stawów | 11 (6 aktywnych + 5 pasywnych) |
| Tryb transmisji | Transmisja zębatkowa |
| Interfejs sterowania | CAN/RS485 |
| Waga | 370g |
| Maksymalne obciążenie | 30kg |
| Napięcie robocze | DC24V±10% |
| Dokładność powtarzalności pozycji | ±0.2mm |
| Czujnik dotykowy | Opcjonalny |
| Maksymalna siła nacisku kciuka | 28N |
| Maksymalna siła czterech palców | 33N |
| Maksymalna siła chwytu pięciu palców | 130N |
| Wymiary (Wygląd) | Wysokość 177mm; Szerokość 76.5mm; Grubość 40mm |
Zakres ruchu
| LF2, RF2, MF2, FF2 (Zginanie) | 90° |
| LF1, RF1, MF1, FF1 (Zginanie) | 80° |
| KCIUK1 (Zginanie) | 55° |
| KCIUK2 (Zginanie) | 30° |
| KCIUK3 (Bok - kołysanie) | 88° |
Co jest w zestawie
- Kabel debugowania USB-to-CAN ×1
- Kabel łączący XT30 (2+2) ×1
- Zasilacz ×1
- Kabel zasilający ×1
- Linker Hand O6 x1
W celu uzyskania pomocy w sprzedaży lub wsparcia technicznego, skontaktuj się [email protected] or odwiedź https://rcdrone.top/.
Aplikacje
- Obsługa logistyki i transfer materiałów
- Montowanie przemysłowe i manipulacja narzędziami
- Stabilne chwytanie nieregularnych kształtów i przedmiotów konsumpcyjnych
Podręczniki
Linker_Hand_O6_Product_Manual.pdf
Szczegóły

Linker Hand O6 oferuje 6 aktywnych i 5 pasywnych stawów dla precyzyjnego, mocnego chwytu. Kompaktowa, trwała konstrukcja aluminiowa nadaje się do logistyki, montażu i nieregularnego chwytania. Oferuje integrację z chmurą dla łatwego szkolenia AI bez kodowania.


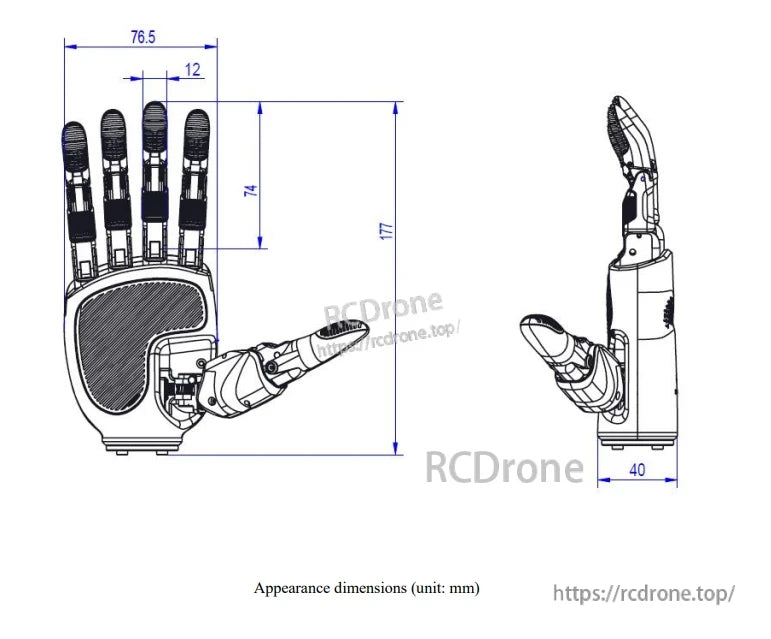
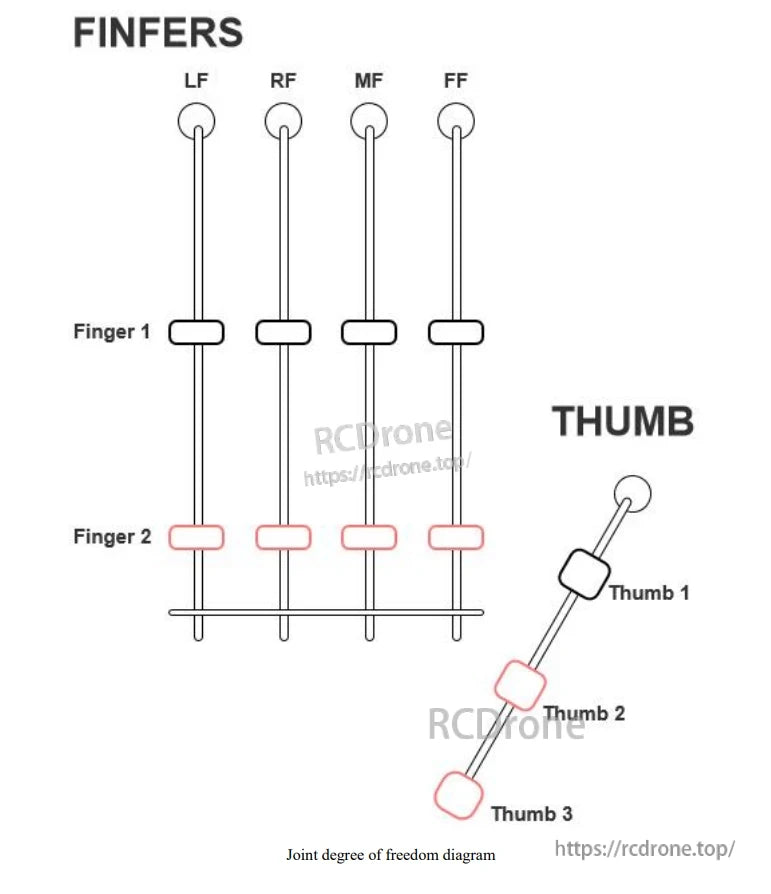
Diagram stopni swobody stawów palców i kciuka
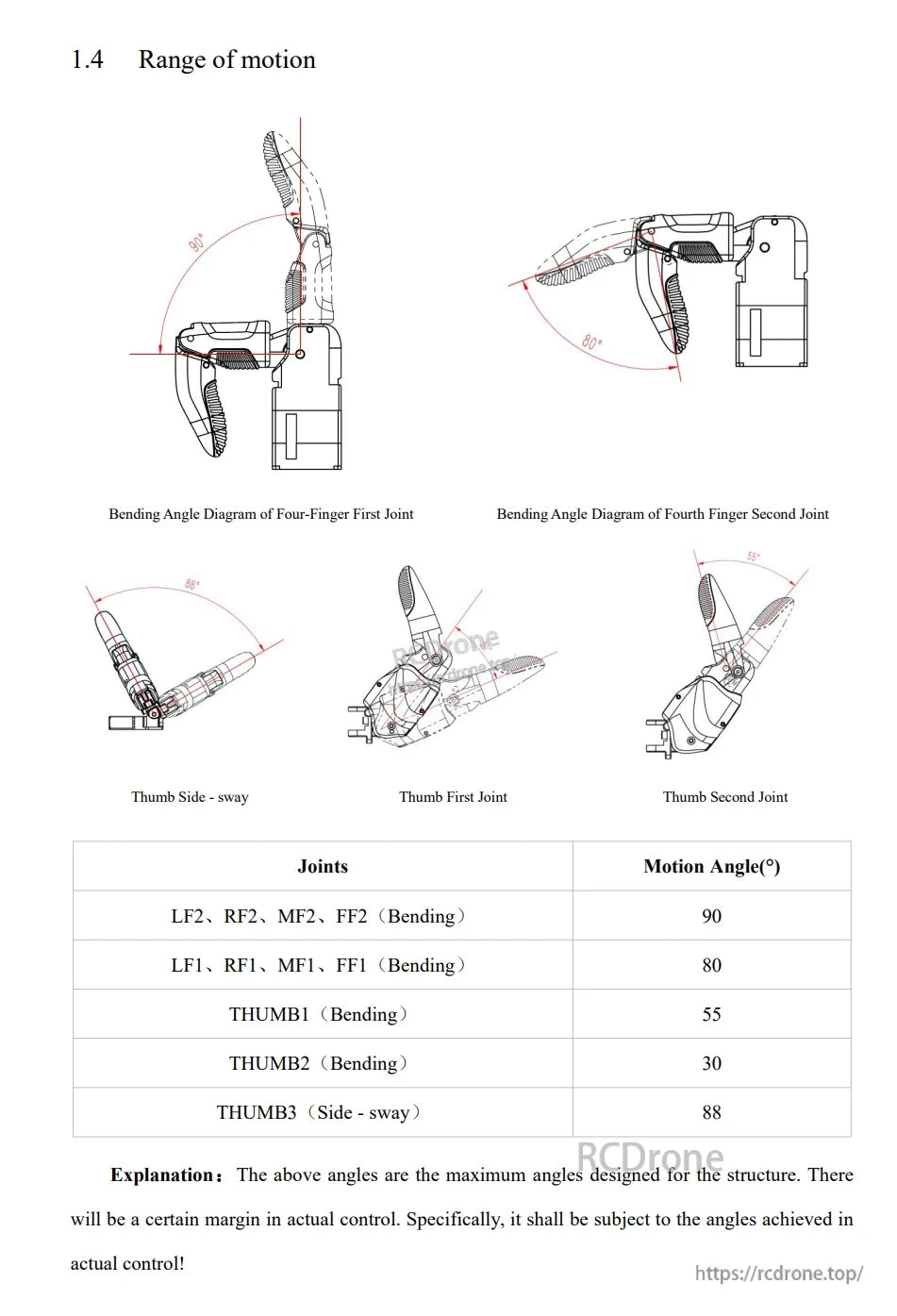
Palce zginają się w kącie 80–90°, kciuk zgina się w kącie 30–55°, a ruch boczny osiąga 88°. To są maksymalne zaprojektowane kąty; rzeczywista kontrola może się nieznacznie różnić.
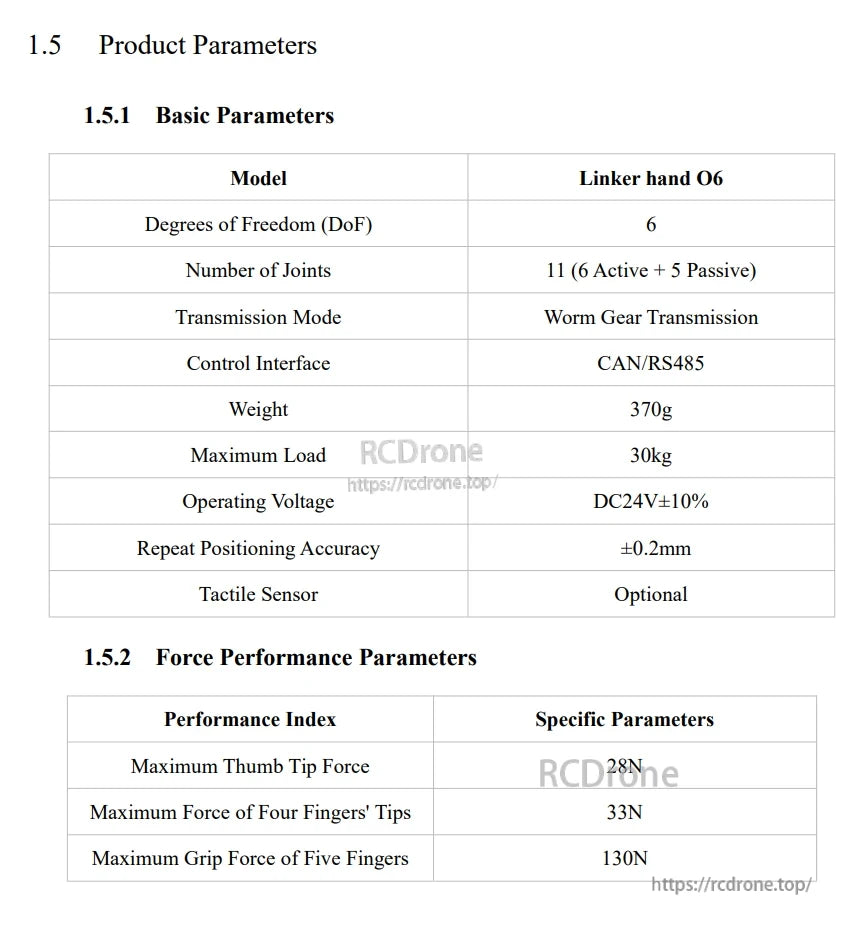
Robotyczna ręka Linker Hand O6 ma 6 stopni swobody, 11 stawów, przekładnię ślimakową, kontrolę CAN/RS485, waży 370g, obsługuje maksymalne obciążenie 30kg, działa przy DC24V±10%, z dokładnością ±0,2mm, i oferuje opcjonalne czujniki dotykowe z określoną wydajnością siły.

Lista akcesoriów do instalacji zręcznej ręki: kabel USB-do-CAN, złącze XT30, zasilacz i kabel zasilający—wszystkie ilości po jednym.
Related Collections







