



LKMTECH MF4005-V2 Silnik 12V RS485/CAN 18-bitowy Enkoder Magnetyczny Opcja Sterownika DF40V2 do Robotyki
LKMTECH MF4005-V2 Silnik 12V RS485/CAN 18-bitowy Enkoder Magnetyczny Opcja Sterownika DF40V2 do Robotyki
LKMTECH
Nie można załadować gotowości do odbioru
Przegląd
LKMTECH MF4005-V2 to silnik zaprojektowany do zintegrowanych aplikacji mechatronicznych wymagających lekkiej konstrukcji, wysokiej precyzji sterowania i wysokiego momentu obrotowego. Aktualizacja MF4005 V2 podkreśla: rozdzielczość enkodera zwiększoną z 14-bitów do 18-bitów, optymalizację momentu obrotowego, wsparcie dla wejścia PWM oraz komunikację CAN/RS485 z wieloma opcjami prędkości transmisji.
Kluczowe cechy
- Zintegrowany design: integracja mechaniczno-elektryczna
- Lekka konstrukcja: spłaszczony design z aluminium lotniczego
- Wysoka dokładność kontroli: enkoder magnetyczny (aktualizacja MF4005 V2 wskazuje 14-bitowy, zaktualizowany do 18-bitowego)
- Wysoki moment obrotowy: wysokowydajny magnes trwały RbFeB
- Obsługuje wejście PWM
- Komunikacja: CAN lub RS485
- Funkcje napędu: możliwość przełączania między trybem momentu obrotowego, trybem prędkości i trybem pozycji
- Główna kontrola: 32-bitowy procesor ARM Cortex-M4 o wysokiej wydajności (napęd)
- Monitorowanie temperatury stojana w czasie rzeczywistym (napęd)
- Etap mocy napędu: pełny mostek z niską rezystancją wewnętrzną i wysokim prądem
- 18-bitowy enkoder magnetyczny o pojedynczym obrocie z wartością bezwzględną (tekst funkcji napędu); jedna kalibracja, pozycja zerowa nigdy nie ginie
- Notatki dotyczące budowy silnika: wirnik zewnętrzny; projekt wielostopniowego łuku z magnesem trwałym; mniejsza szczelina powietrzna; magnetyzacja radialna; 0.2 mm blacha ze stali silikonowej; drut emaliowany izolowany klasy H; magnesy NdFeB klasy SH
- Usługa OEM/ODM (nie specyfikacja produktu)
- Oprogramowanie parametrów: oprogramowanie dostarczane do regulacji parametrów, testowania i aktualizacji; wspiera rozwój open source, taki jak PC, MCU, PLC, ICP i RPi
Scenariusze zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonogie
- Pojazdy AGV
- Roboty ARU
- Kamery PTZ
- Laser Lidar
- Robot inspekcyjny stacji energetycznej
- Inspekcja przemysłowa
Specyfikacje
Model silnika: MF4005-V2
| Parametr | Wartość (25 zwojów) | Wartość (40 zwojów) |
|---|---|---|
| Nazwa przedmiotu | MF4005-V2 | MF4005-V2 |
| Zwoje | 25 | 40 |
| Napięcie znamionowe | 12V | 12V |
| Maksymalna prędkość | 2390RPM | 1300RPM |
| N moment znamionowy | 0.07 N.m | 0.06 N.m |
| Prędkość nominalna | 1600RPM | 700RPM |
| Prąd nominalny | 1.44A | 0.81A |
| Moc maksymalna | 14W | 4.6W |
| Maksymalny moment | 0.25 N.m | 0.12 N.m |
| Stała prędkości | 133 rpm/V | 58 rpm/V |
| Stała momentu | 0.05 N.m/A | 0.07 N.m/A |
| Typ uzwojenia | Y | Y |
| Opór fazy | 1.9Ω | 4.3Ω |
| Indukcyjność fazy | 0.5mH | 1.2mH |
| Polary silnika | 26 | 26 |
| Inercja wirnika | 56 gcm² | 56 gcm² |
| Temperatura silnika | TAK | TAK |
| Obciążenie nominalne łożyska | 140N | 140N |
| Waga silnika | 65g | 65g |
| Zalecany napęd | DF40V2 | DF40V2 |
| Napięcie wejściowe napędu | 7.4-32V | 7.4-32V |
| Komunikacja | RS485 LUB CAN | RS485 LUB CAN |
| Częstotliwość komunikacji | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Enkoder | Enkoder magnetyczny 18bit | Enkoder magnetyczny 18bit |
| Prędkość baud enkodera (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Prędkość baud (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Tryb sterowania | Pętla momentu (24KHz) / Pętla prędkości (8KHz) / Pętla pozycji (8KHz) | Pętla momentu (24KHz) / Pętla prędkości (8KHz) / Pętla pozycji (8KHz) |
| Krzywa przyspieszenia | Przyspieszenie trapezowe | Przyspieszenie trapezoidalne |
Definicja interfejsu
Przełącznik ID: PRZEŁĄCZNIK ID
| Interfejs | Uwaga |
|---|---|
| A/L | RS485-A lub CAN-L |
| B/H | RS485-B lub CAN-H |
| V+ | Dodatnie zasilanie |
| V+ | Dodatnie zasilanie |
| V- | Ujemne zasilanie |
| V- | Ujemne zasilanie |
| T | Transmiter UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
W celu uzyskania wsparcia przed sprzedażą lub integracją (konfiguracja RS485/CAN, wybór prędkości baud i pliki CAD), skontaktuj się [email protected] or odwiedź https://rcdrone.top/.
Podręczniki / Pliki
Szczegóły

MF4005‑V2 integruje funkcje silnika, enkodera i napędu dla kompaktowych konstrukcji robotycznych, z ulepszonym 18-bitowym enkoderem magnetycznym oraz opcjami komunikacji CAN/RS485.
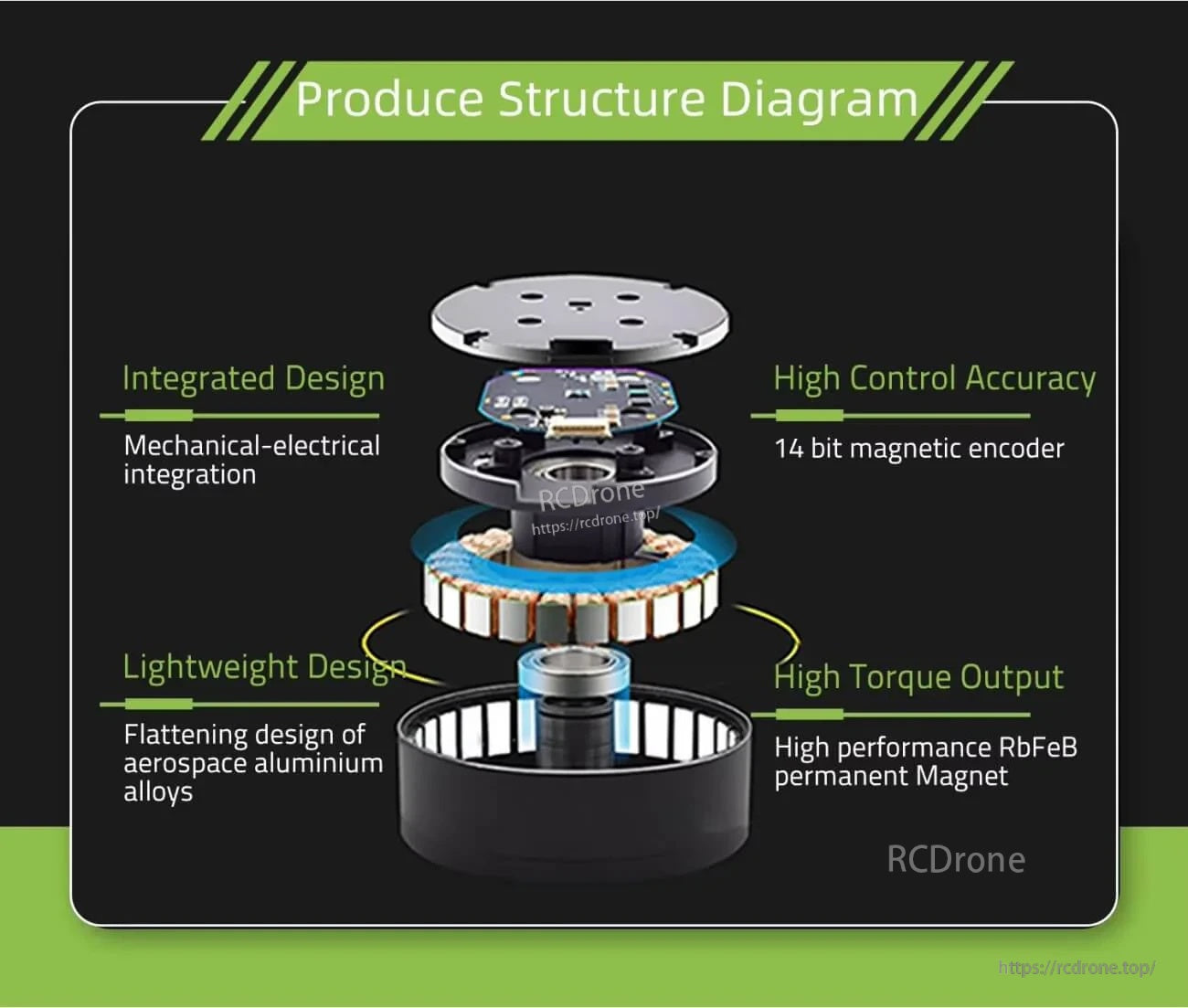
Zintegrowana, lekka konstrukcja łączy elektronikę napędu z zespołem silnika, aby wspierać precyzyjną kontrolę i wysoką moc wyjściową.
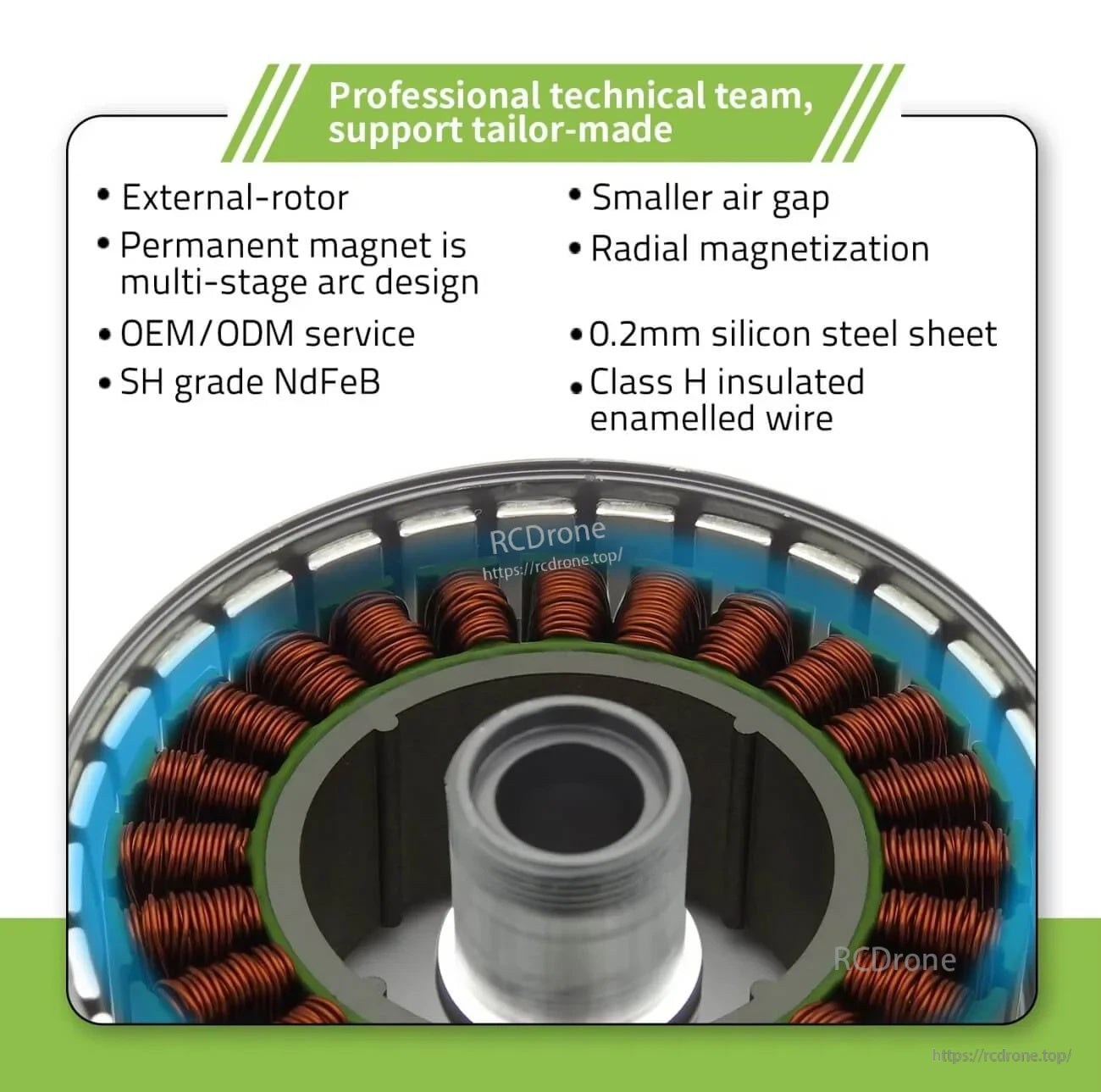
Projekt zewnętrznego wirnika i gęsty układ uzwojeń pomagają zrównoważyć rozmiar, responsywność i moment obrotowy dla stawów robotycznych i siłowników.
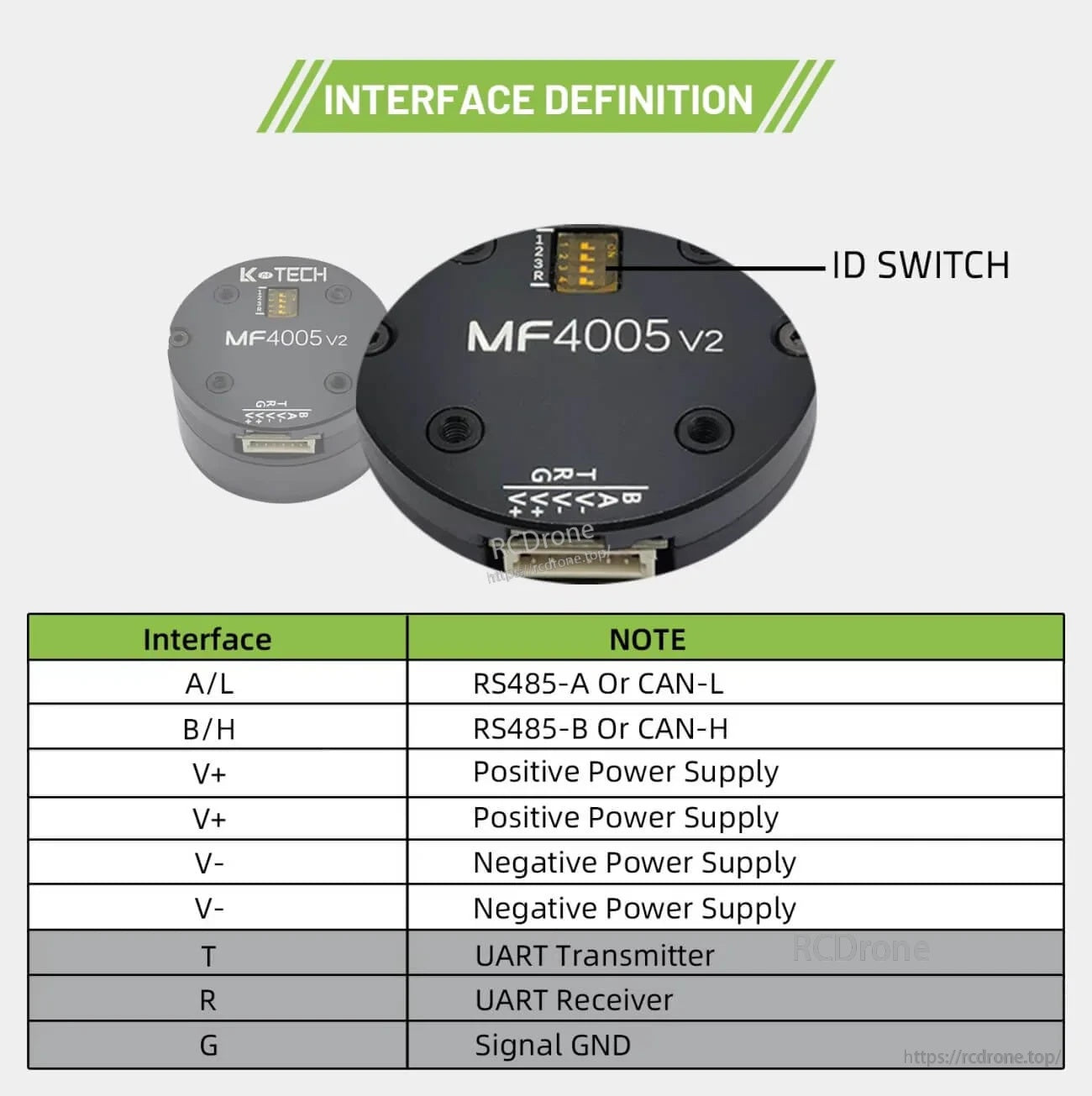
Okablowanie jest uproszczone dzięki wyraźnie oznaczonemu złączu i przełącznikowi ID do konfiguracji magistrali z użyciem RS485 lub CAN.
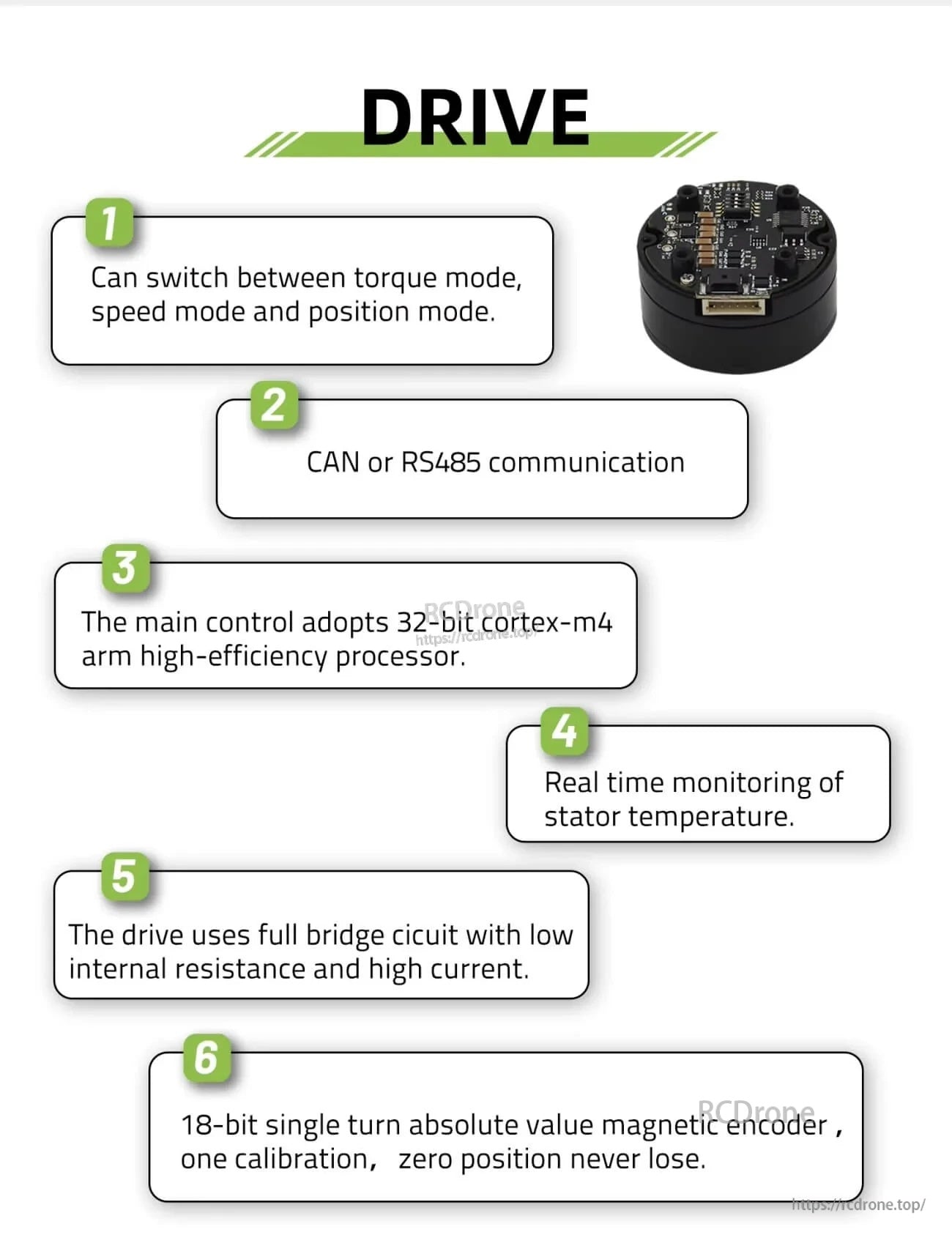
Możliwości napędu obejmują wybieralne tryby momentu obrotowego, prędkości i pozycji, a także monitorowanie temperatury stojana w czasie rzeczywistym przez CAN lub RS485.
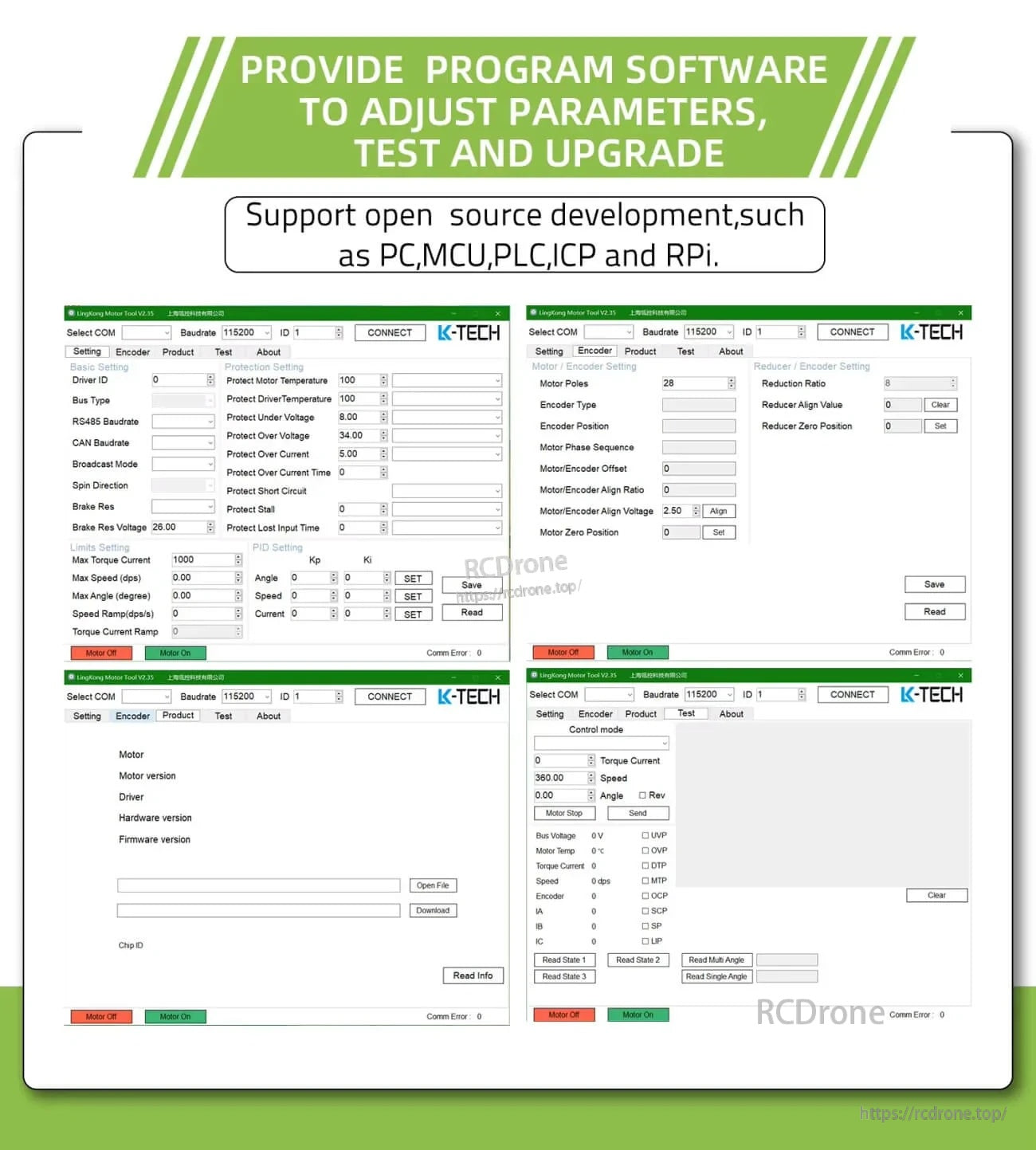
Wsparcie oprogramowania PC pomaga w dostosowywaniu parametrów, testowaniu i aktualizacjach, z opcjami dostosowanymi do procesów rozwoju.
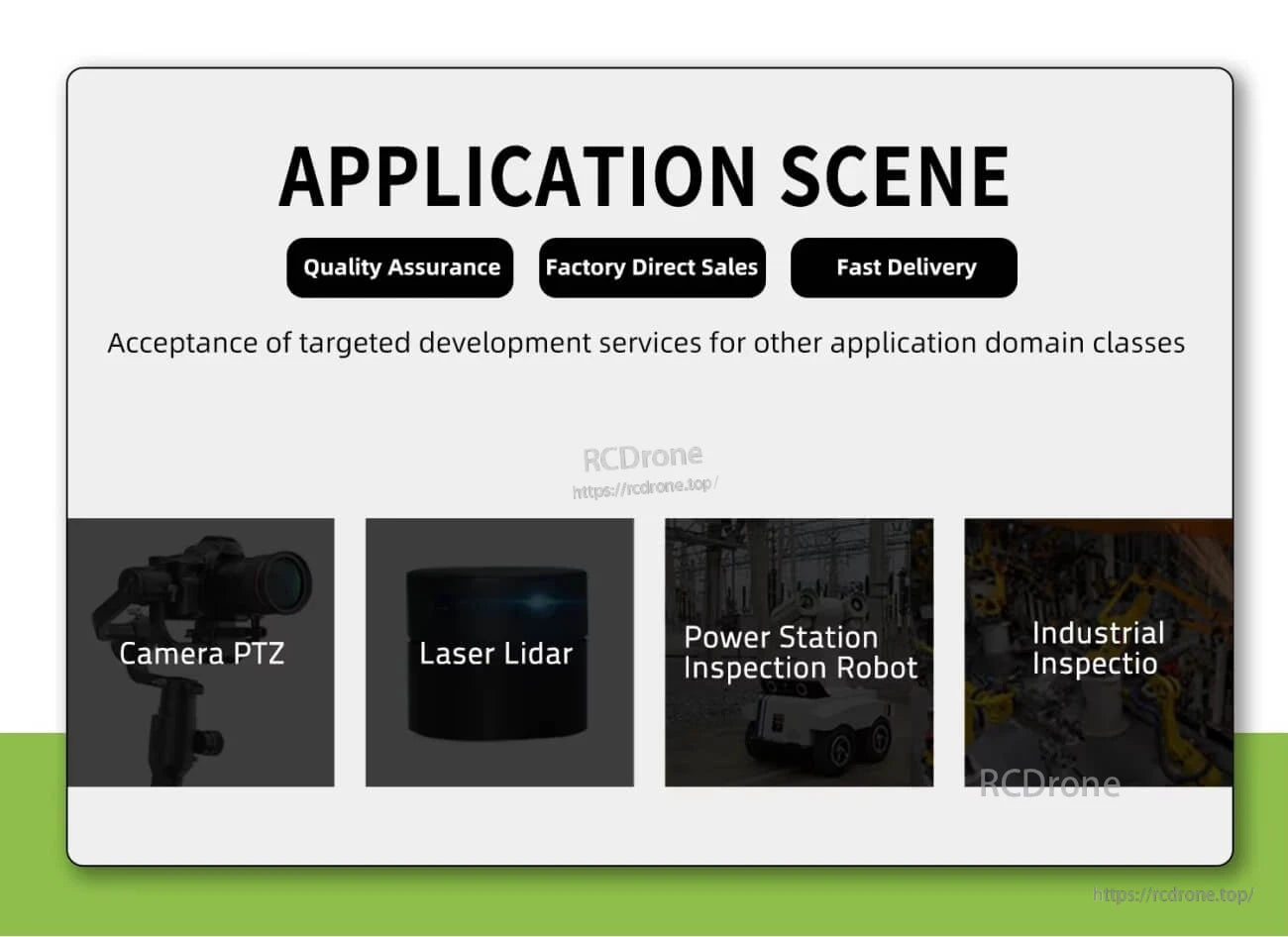
Typowe obszary zastosowań obejmują głowice kamer PTZ, systemy lidarowe oraz roboty inspekcyjne używane w środowiskach przemysłowych.
Related Collections



