



LKMTECH MF5010-V2 Silnik 16V 10T/35T, RS485/CAN, 18-bitowy enkoder magnetyczny do robotów & AGV
LKMTECH MF5010-V2 Silnik 16V 10T/35T, RS485/CAN, 18-bitowy enkoder magnetyczny do robotów & AGV
LKMTECH
Nie można załadować gotowości do odbioru
Przegląd
LKMTECH Silnik MF5010-V2 to zintegrowany, lekki silnik zaprojektowany do wysokiej precyzji sterowania i dużego momentu obrotowego. Obsługuje komunikację RS485 lub CAN i zawiera enkoder magnetyczny 18-bitowy. Notatki dotyczące aktualizacji produktu obejmują: rozdzielczość enkodera zaktualizowaną z 14 bitów do 18 bitów, optymalizację momentu obrotowego, wsparcie dla wejścia PWM oraz wsparcie CAN/RS485 z różnymi prędkościami transmisji.
Kluczowe cechy
- Zintegrowany design (integracja mechaniczno-elektryczna)
- Lekka konstrukcja
- Wysoka dokładność sterowania
- Wysoki moment obrotowy
- Wysokowydajny magnes trwały RbFeB
- Enkoder magnetyczny 18-bitowy
- Komunikacja: RS485 lub CAN
- Obsługuje wejście PWM
- Przyspieszenie trapezoidalne
Scenariusze zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
- Kamera PTZ
- Laser lidar
- Robot do inspekcji stacji energetycznych
- Inspekcja przemysłowa
Specyfikacje
| Parametr | MF5010-V2 (10T) | MF5010-V2 (35T) |
|---|---|---|
| Nazwa przedmiotu | MF5010-V2 | MF5010-V2 |
| Obroty | 10 | 35 |
| Napięcie znamionowe | 16V | 16V |
| Maksymalna prędkość | 3050RPM | 870RPM |
| Moment obrotowy znamionowy | 0.26N.m | 0.24N.m |
| Prędkość nominalna | 2400RPM | 440RPM |
| Prąd nominalny | 5.06A | 1.35A |
| Maksymalna moc | 128W | 12W |
| Maksymalny moment | 0.4N.m | 0.53N.m |
| Stała prędkości | 150rpm/V | 27.5rpm/V |
| Stała momentu | 0.05N.m/A | 0.18N.m/A |
| Typ uzwojenia | Y | Y |
| Opór fazy | 0.33Ω | 3.2Ω |
| Indukcyjność fazy | 0.13mH | 1.2mH |
| Polary silnika | 28 | 28 |
| Inercja wirnika | 202gcm² | 202gcm² |
| Temperatura silnika | TAK | TAK |
| Obciążenie nominalne łożyska | 153N | 153N |
| Waga silnika | 137g | 137g |
| Rekomendowany napęd | DF40V2 | DF40V2 |
| Napięcie wejściowe napędu | 7.4-32V | 7.4-32V |
| Komunikacja | RS485 LUB CAN | RS485 LUB CAN |
| Częstotliwość komunikacji | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Enkoder | Enkoder magnetyczny 18bit | Enkoder magnetyczny 18bit |
| Prędkość baud enkodera (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Prędkość baud (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Tryb sterowania | Pętla momentu (24KHz)/Pętla prędkości (8KHz)/Pętla pozycji (8KHz) | Pętla momentu (24KHz)/Pętla prędkości (8KHz)/Pętla pozycji (8KHz) |
| Krzywa przyspieszenia | Przyspieszenie trapezowe | Przyspieszenie trapezoidalne |
Rysunek instalacyjny (kluczowe wymiary)
- Oznaczenia średnicy: Ø44.4, Ø44, Ø25
- Oznaczenie wału/otworu: Ø12.7H7 głębokość 16.5
- Oznaczenie średnicy korpusu: Ø49 (-0.10), Ø49 (-0.05)
- Oznaczenia długości: 28.9 ±0.10, 17.5
- Otwory montażowe: 4-M2.5 głębokość 8; 6-M2.5 głębokość 3; 4-M3 głębokość 3.5
- Dodatkowe oznaczenie długości: 20
Podręczniki / Dokumenty
W celu uzyskania pomocy w zakresie okablowania, integracji i zamówień (w tym wyboru napędu DF40V2 oraz konfiguracji RS485/CAN), skontaktuj się z [email protected] or odwiedź https://rcdrone.top/ .
Szczegóły

Zbudowany dla kompaktowych stawów robotycznych, MF5010 V2 łączy zintegrowany projekt silnika z komunikacją RS485/CAN oraz ulepszonym enkoderem.
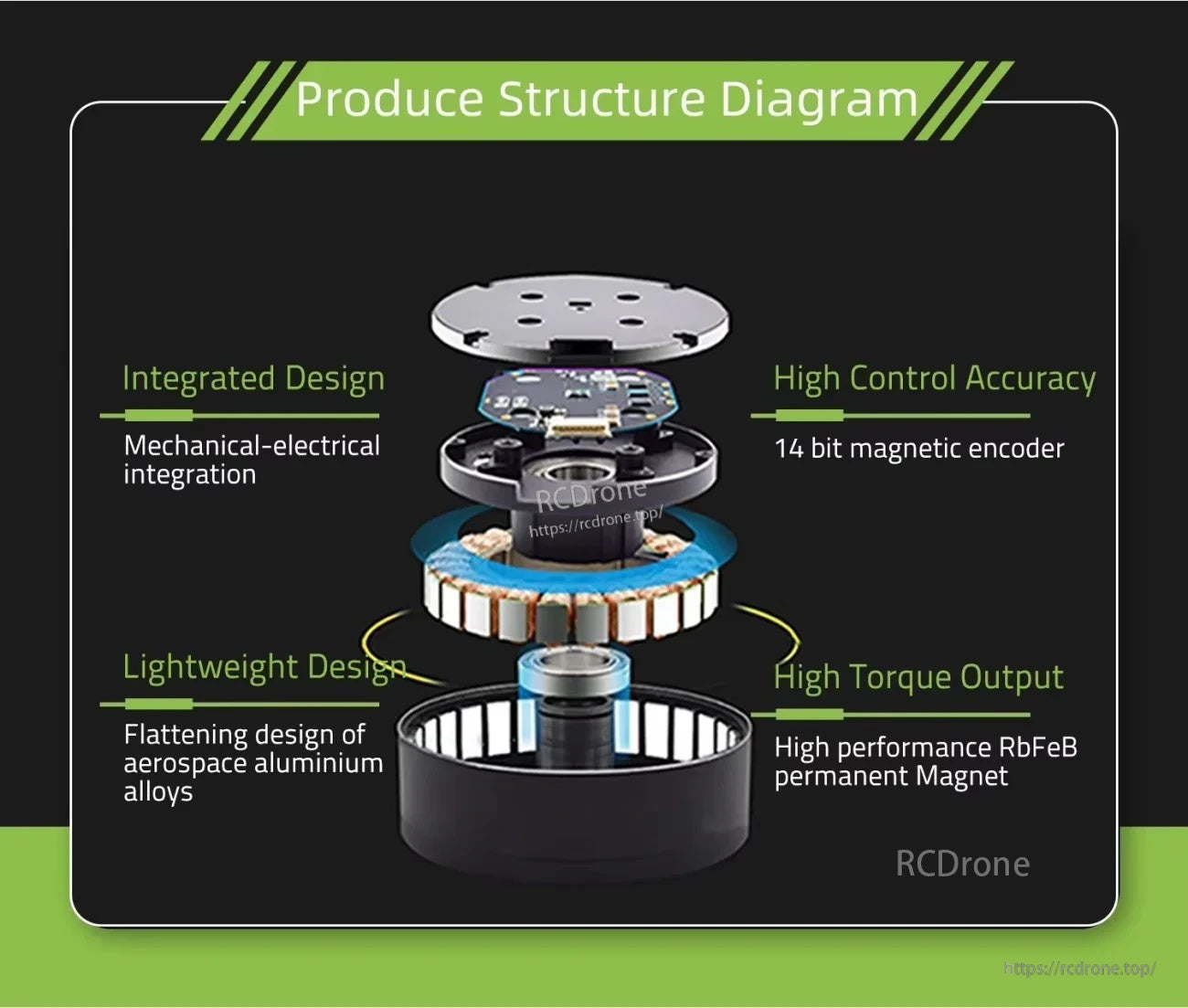
Zintegrowana struktura mechaniczno-elektryczna pomaga utrzymać niską wagę, jednocześnie wspierając precyzyjną kontrolę i moment obrotowy.
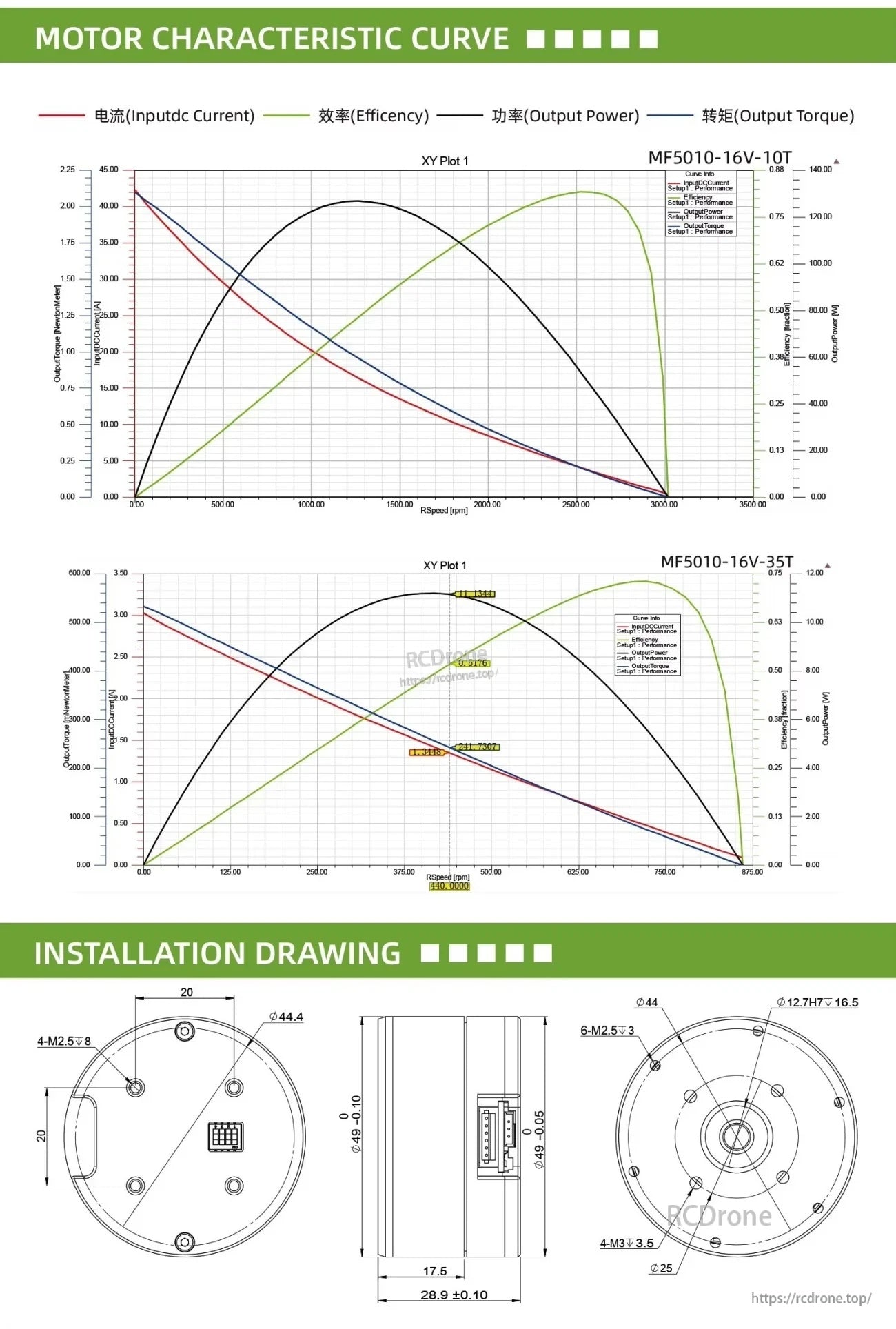
Krzywe odniesienia i rysunek instalacyjny pomagają dopasować opcję nawijania 10T lub 35T do Twoich potrzeb dotyczących prędkości/ momentu obrotowego oraz układu montażu.

Related Collections



