



LKMTECH MF6015-V2 Silnik 24V (15T/25T) 18-bitowy Enkoder Magnetyczny, RS485/CAN, Zalecany sterownik DF40v2
LKMTECH MF6015-V2 Silnik 24V (15T/25T) 18-bitowy Enkoder Magnetyczny, RS485/CAN, Zalecany sterownik DF40v2
LKMTECH
Nie można załadować gotowości do odbioru
Przegląd
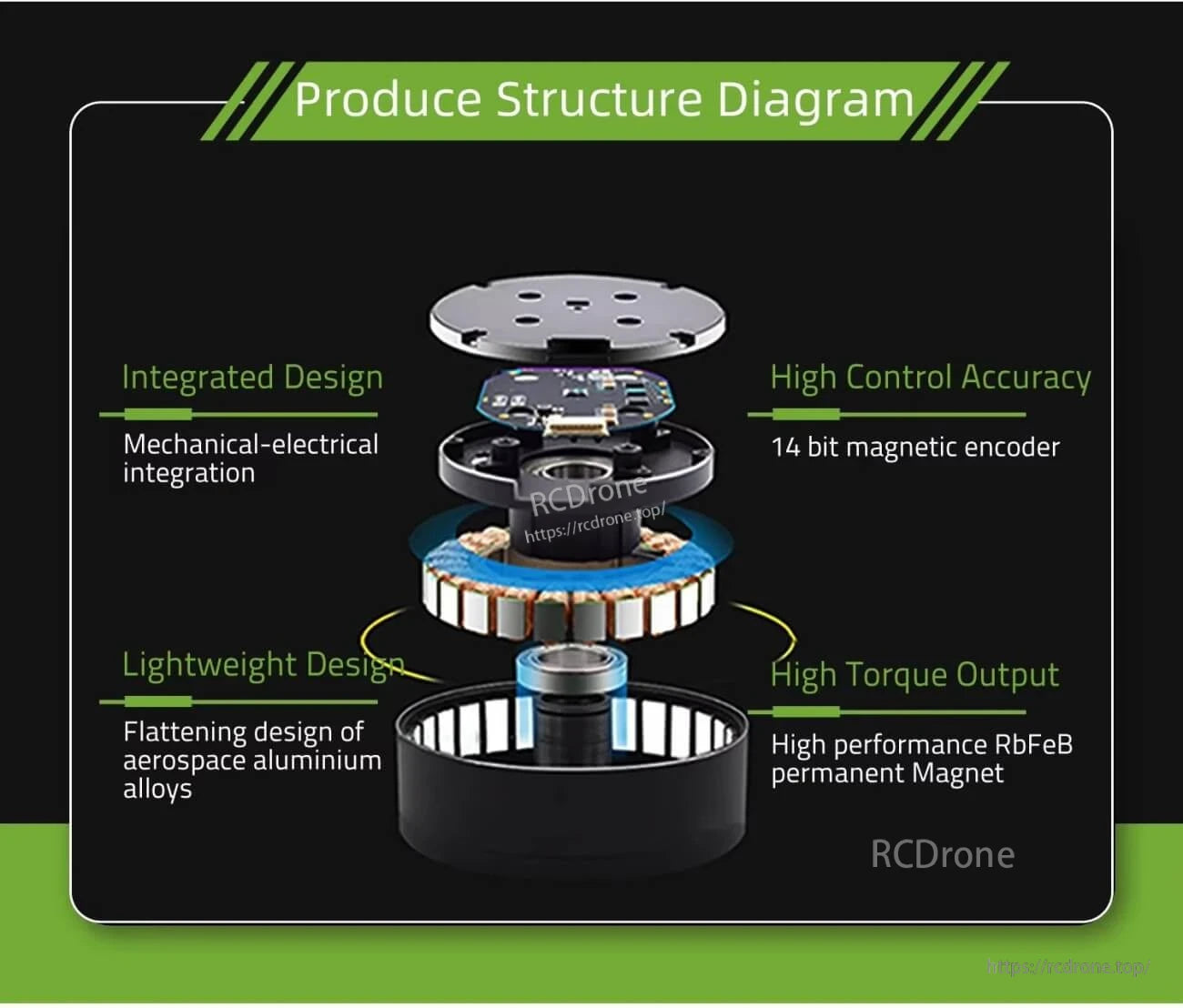
LKMTECH MF6015-V2 Silnik (MF6015v2) to system silnikowy o zintegrowanej konstrukcji, charakteryzujący się lekką budową, wysoką precyzją sterowania i dużym momentem obrotowym. Aktualizacje MF v2 obejmują rozdzielczość enkodera zwiększoną z 14-bitów do 18-bitów , optymalizację momentu obrotowego, wsparcie dla wejścia PWM, oraz komunikację CAN i RS485 z wieloma opcjami prędkości transmisji.
Kluczowe cechy
- Zintegrowana konstrukcja: integracja mechaniczno-elektryczna
- Lekka konstrukcja: spłaszczona konstrukcja z aluminium lotniczego
- Wysoki moment obrotowy: wysoka wydajność magnesu trwałego RbFeB
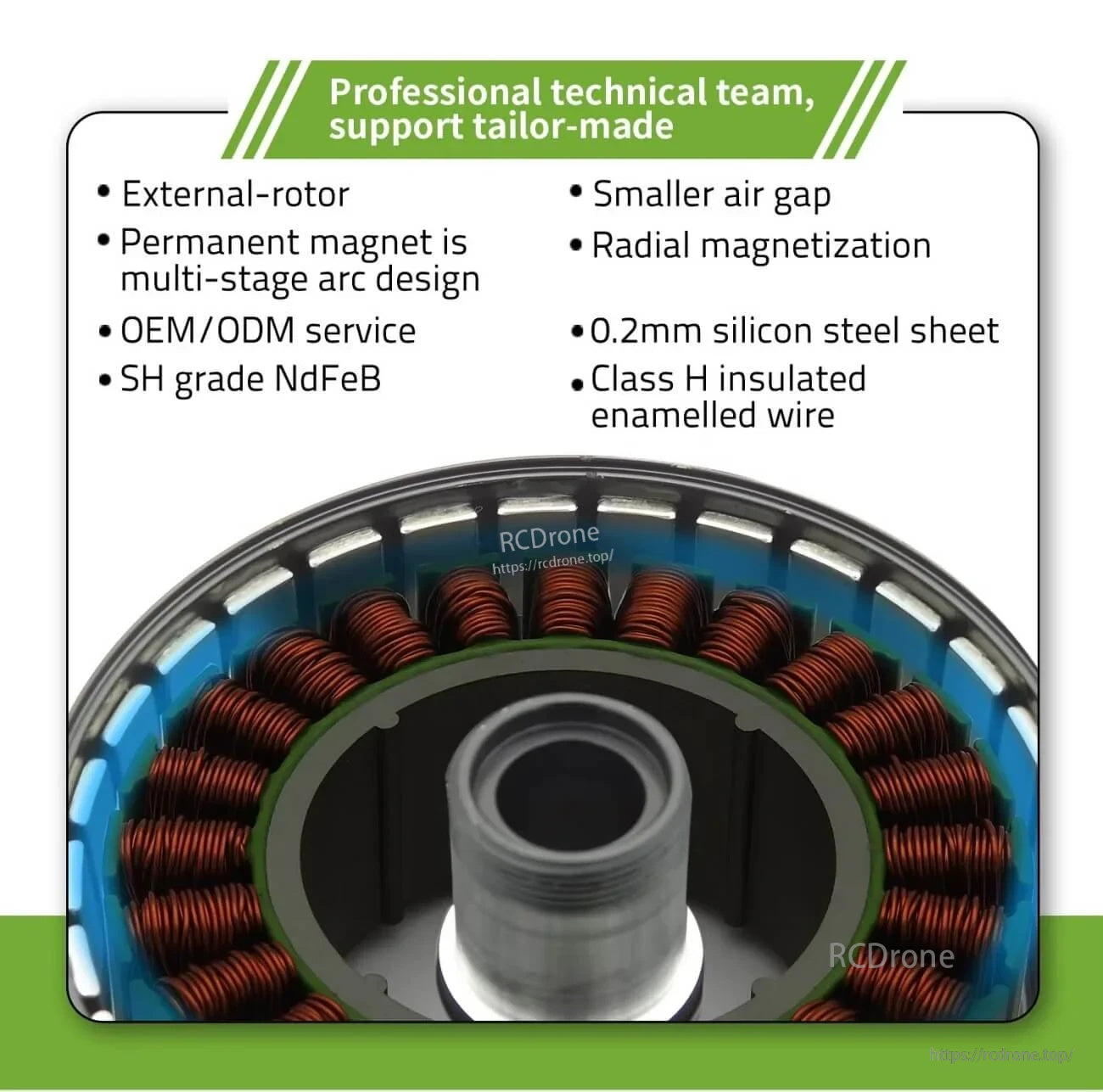
- Najważniejsze cechy konstrukcji silnika: wirnik zewnętrzny; wielostopniowy łukowy projekt magnesu trwałego; mniejsza szczelina powietrzna; magnetyzacja radialna; 0.2mm stalowa blacha silikonowa; Drut emaliowany izolowany klasy H; Magnesy NdFeB klasy SH
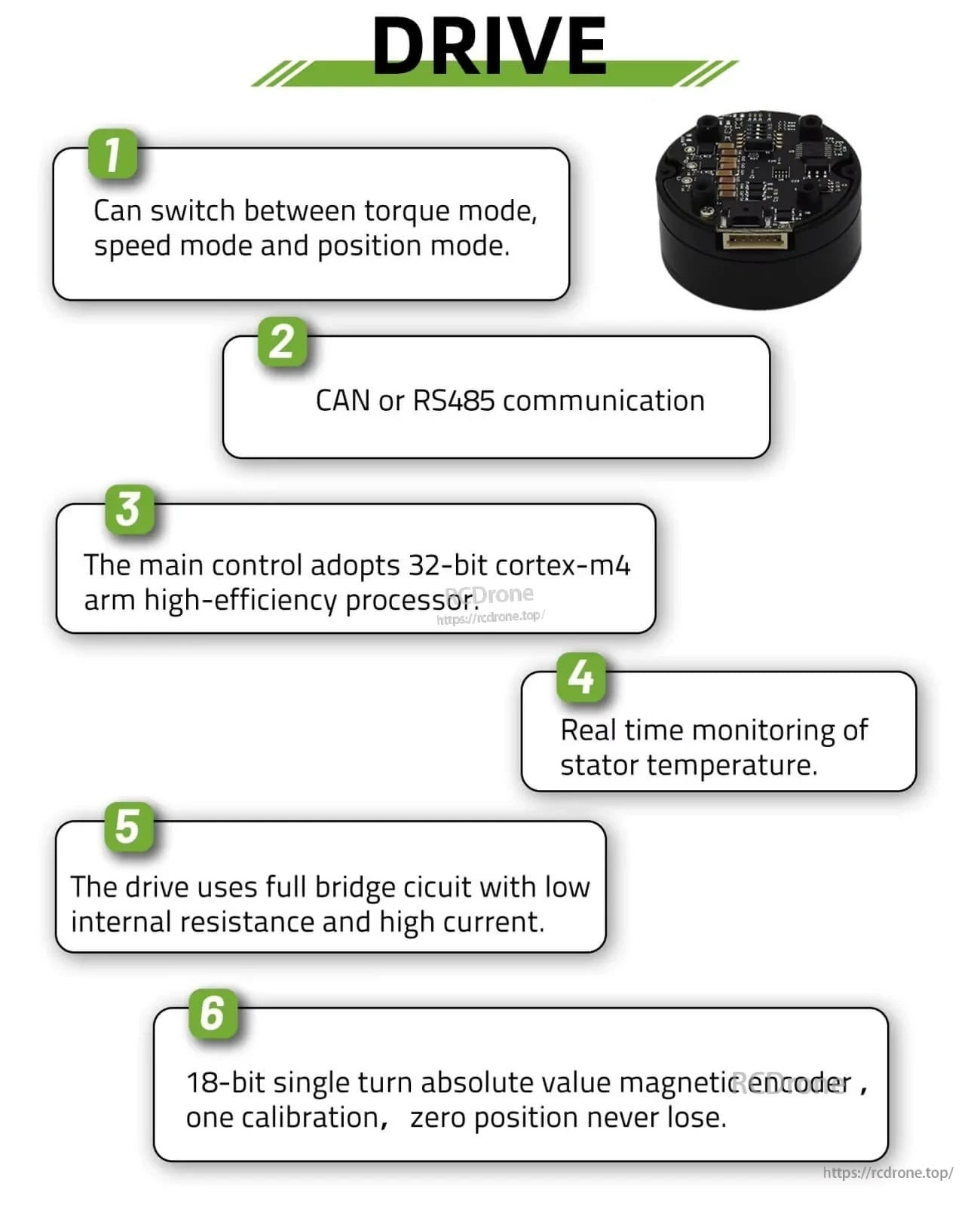
- Możliwości napędu/sterowania: może przełączać się między trybem momentu obrotowego, trybem prędkości i trybem pozycji; komunikacja CAN lub RS485; główny kontroler wykorzystuje 32-bitowy procesor ARM cortex-m4 o wysokiej wydajności; monitorowanie temperatury stojana w czasie rzeczywistym; pełny mostek z niską rezystancją wewnętrzną i wysokim prądem
- Enkoder: 18-bitowy enkoder magnetyczny o absolutnej wartości jednego obrotu; jedna kalibracja; pozycja zerowa nigdy nie ginie
- Oprogramowanie: dostarcza oprogramowanie do programowania w celu dostosowania parametrów, testowania i aktualizacji; wspiera rozwój open source, taki jak PC, MCU, PLC, ICP i RPi
W przypadku pytań dotyczących integracji (okablowanie, konfiguracja CAN/RS485 lub wybór między 15T a 25T), skontaktuj się z pomocą techniczną pod adresem https://rcdrone.top/ lub [email protected] .
Scenariusze aplikacji
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Specyfikacje
| Parametr | Wartość (15T) | Wartość (25T) |
|---|---|---|
| Nazwa przedmiotu | MF6015v2 | MF6015v2 |
| Obroty | 15 | 25 |
| Napięcie znamionowe | 24V | 24V |
| Maksymalna prędkość | 1650RPM | 872RPM |
| Moment obrotowy znamionowy | 0.81N.m | 0.82N.m |
| Prędkość znamionowa | 1260RPM | 560RPM |
| Prąd znamionowy | 5.87A | 3.1A |
| Maksymalna moc | 185W | 57W |
| Maksymalny moment obrotowy | 5.5N.m | 3N.m |
| Stała prędkości | 53rpm/V | 23.3rpm/V |
| Stała momentu obrotowego | 0.14N.m/A | 0.26N.m/A |
| Typ uzwojenia | Y | Y |
| Opór linii | 0.89Ω | 2.17Ω |
| Indukcyjność fazy | 0.49mH | 1.44mH |
| Polary silnika | 28 | 28 |
| Inercja wirnika | 515gcm² | 515gcm² |
| Temperatura silnika | TAK | TAK |
| Obciążenie nominalne łożyska | 280N | 280N |
| Waga silnika | 251g | 251g |
| Zalecany napęd | DF40v2 | DF40v2 |
| Napięcie wejściowe napędu | 7.4-32V | 7.4-32V |
| Komunikacja | RS485 LUB CAN | RS485 LUB CAN |
| Częstotliwość komunikacji | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18-bitowy enkoder magnetyczny | 18-bitowy enkoder magnetyczny |
| Prędkość baud (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Prędkość baud (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Tryb sterowania | Pętla momentu (24KHz)/Pętla prędkości (8KHz)/Pętla pozycji (8KHz) | Pętla momentu (24KHz)/Pętla prędkości (8KHz)/Pętla pozycji (8KHz) |
| Krzywa przyspieszenia | Przyspieszenie trapezowe | Przyspieszenie trapezoidalne |
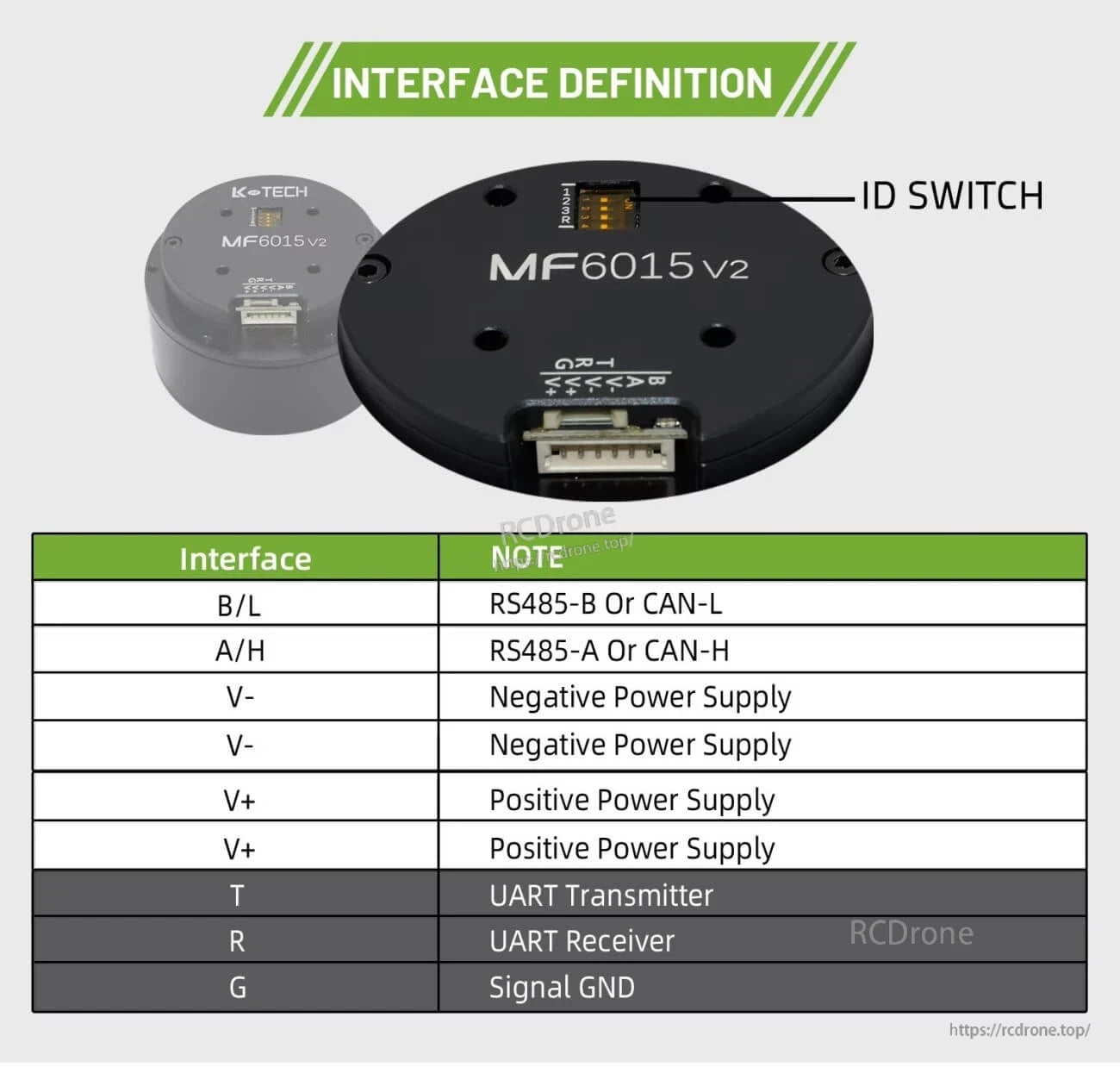
Definicja interfejsu
| Interfejs | Uwaga |
|---|---|
| B/L | RS485-B lub CAN-L |
| A/H | RS485-A lub CAN-H |
| V- | Ujemne zasilanie |
| V- | Ujemne zasilanie |
| V+ | Dodatnie zasilanie |
| V+ | Dodatnie zasilanie |
| T | Nadajnik UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
PRZEŁĄCZNIK ID jest dostępny w urządzeniu.
Podręczniki / Dokumenty
Szczegóły

MF6015-V2 integruje silnik, napęd i 18-bitowy enkoder magnetyczny dla kompaktowych stawów robotów 24V z kontrolą CAN lub RS485.
Zintegrowany układ mechaniczno-elektryczny utrzymuje montaż płaski i lekki, jednocześnie zapewniając wysoką moc momentu obrotowego.
Konstrukcja z zewnętrznym wirnikiem i małą szczeliną powietrzną została zaprojektowana w celu poprawy gęstości momentu obrotowego i płynności obrotu.
Pinout złącza i wbudowany przełącznik ID ułatwiają okablowanie i adresowanie wielowęzłowego CAN/RS485.
Obsługiwane są tryby kontroli momentu, prędkości i pozycji, z monitorowaniem temperatury stojana w czasie rzeczywistym przez CAN lub RS485.
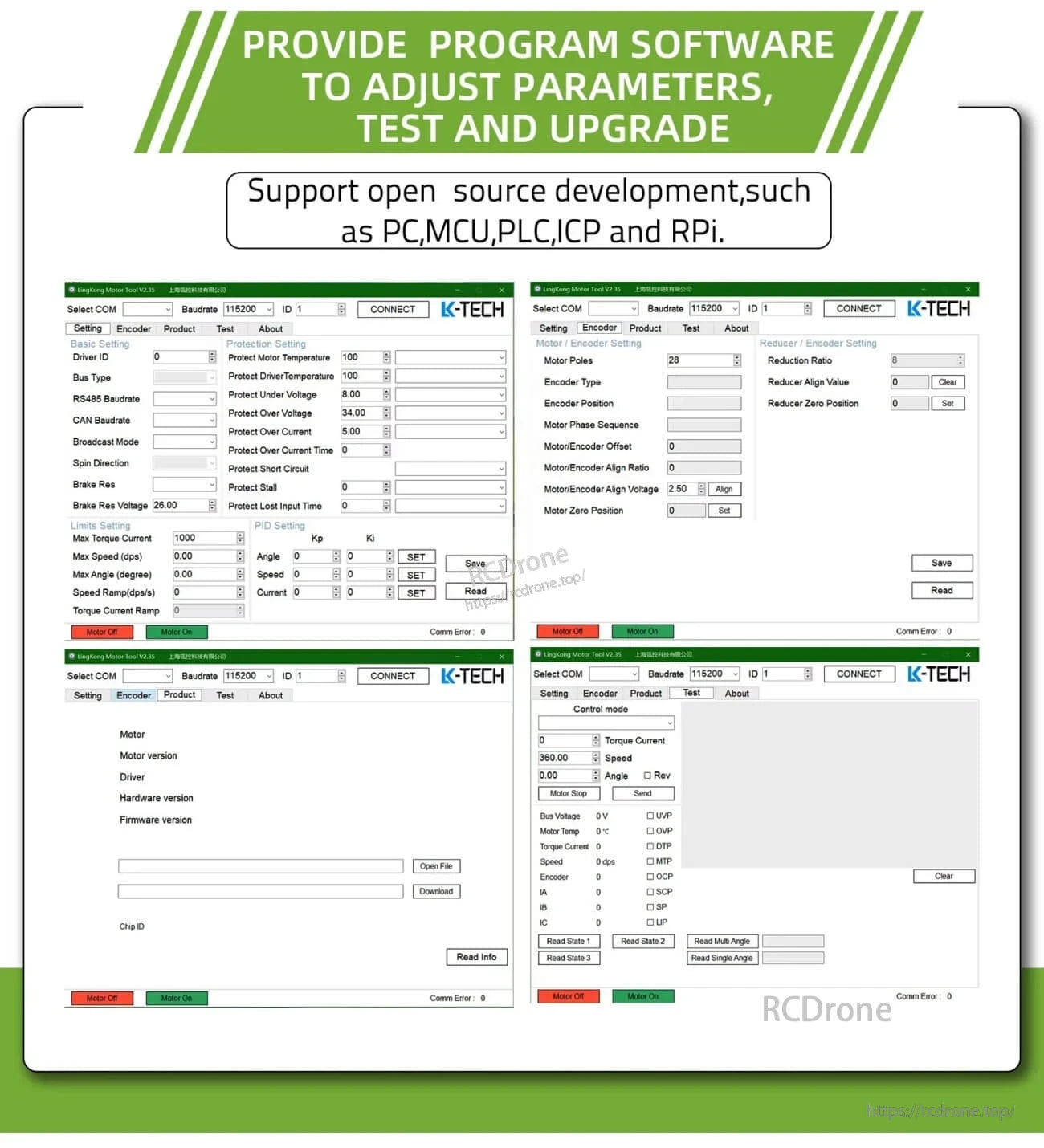
Oprogramowanie PC jest dostarczane do dostrajania parametrów, testowania i aktualizacji oprogramowania układowego, z opcjami dla prędkości transmisji i ustawień sterowania.

Related Collections



