



LKMTECH MF7010-V2 Silnik 24V (23T/45T) RS485/CAN Enkoder 18-bitowy, Sterownik DF70V2 do robotów
LKMTECH MF7010-V2 Silnik 24V (23T/45T) RS485/CAN Enkoder 18-bitowy, Sterownik DF70V2 do robotów
LKMTECH
Nie można załadować gotowości do odbioru
Przegląd
Silnik LKMTECH MF7010-V2 to silnik do robotyki i automatyzacji, oferujący komunikację RS485 lub CAN (z zalecanym napędem DF70V2) oraz zintegrowany enkoder magnetyczny. Specyfikowany jest w dwóch opcjach uzwojenia (23 zwoje / 45 zwojów), obie o napięciu 24V, z obsługą temperatury silnika oraz 18-bitowym enkoderem magnetycznym.
Kluczowe cechy
- Zintegrowany projekt z integracją mechaniczną i elektryczną
- Wysoka dokładność sterowania (14-bitowy enkoder magnetyczny jest odniesiony w materiałach dotyczących cech)
- Wysoki moment obrotowy przy wysokiej wydajności magnesu trwałego RbFeB (sformułowanie materiału dotyczącego cech)
- Lekka konstrukcja z płaskim projektem stopów aluminium lotniczego (sformułowanie materiału dotyczącego cech)
- Konstrukcja zewnętrznego wirnika
- Projekt wielostopniowego łuku z magnesem trwałym
- Mniejsza szczelina powietrzna; magnetyzacja radialna
- 0.2 mm stalowa blacha silikonowa
- Klasa H izolowany drut emaliowany
- Materiał klasy SH NdFeB (opis materiału)
- Oprogramowanie programowe dostarczone do regulacji parametrów, testowania i aktualizacji; wspiera rozwój open source, taki jak PC, MCU, PLC, ICP i RPi
Zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
- Kamery PTZ
- Systemy laserowe LiDAR
- Roboty inspekcyjne stacji energetycznych
- Sprzęt inspekcyjny przemysłowy
Specyfikacje
| Parametr | MF7010-V2 (23 zwoje) | MF7010-V2 (45 zwojów) |
|---|---|---|
| Nazwa przedmiotu | MF7010-V2 | MF7010-V2 |
| Zwoje | 23 | 45 |
| Napięcie znamionowe | 24V | 24V |
| Maksymalna prędkość | 1230 RPM | 620 RPM |
| Napięcie znamionowe momentu | 0.61 N.m | 0.63 N.m |
| Prędkość nominalna | 940 RPM | 400 RPM |
| Prąd nominalny | 3.3 A | 1.75 A |
| Moc maksymalna | 104 W | 31 W |
| Maksymalny moment | 2 N.m | 2.1 N.m |
| Stała prędkości | 39 rpm/V | 16.7 rpm/V |
| Stała momentu | 0.18 N.m/A | 0.36 N.m/A |
| Typ uzwojenia | Y | Y |
| Opór fazy | 0.71 ohm | 2.73 ohm |
| Indukcyjność fazy | 0.86 mH | 3.3 mH |
| Polary silnika | 28 | 28 |
| Inercja wirnika | 748 gcm^2 | 748 gcm^2 |
| Temperatura silnika | TAK | TAK |
| Obciążenie nominalne łożyska | 330 N | 330 N |
| Waga silnika | 278 g | 278 g |
| Rekomendowany napęd | DF70V2 | DF70V2 |
| Napięcie wejściowe napędu | 7.4-32V | 7.4-32V |
| Komunikacja | RS485 lub CAN | RS485 lub CAN |
| Częstotliwość komunikacji | RS485: 500 Hz (115200 bps) / CAN: 2 kHz (1 Mbps) | RS485: 500 Hz (115200 bps) / CAN: 2 kHz (1 Mbps) |
| Enkoder | 18-bitowy enkoder magnetyczny | 18-bitowy enkoder magnetyczny |
| Prędkość baud enkodera (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1 Mbps, 2 Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1 Mbps, 2 Mbps |
| Prędkość baud (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Tryb sterowania | Pętla momentu (24 kHz) / Pętla prędkości (8 kHz) / Pętla pozycji (8 kHz) | Pętla momentu (24 kHz) / Pętla prędkości (8 kHz) / Pętla pozycji (8 kHz) |
| Krzywa przyspieszenia | Przyspieszenie trapezoidalne | Przyspieszenie trapezoidalne |
Podręczniki
W przypadku pytań dotyczących kompatybilności przed sprzedażą (wybór napędu, konfiguracja RS485/CAN, konfiguracja baudrate) lub pomocy w dokumentacji, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/ .
Szczegóły
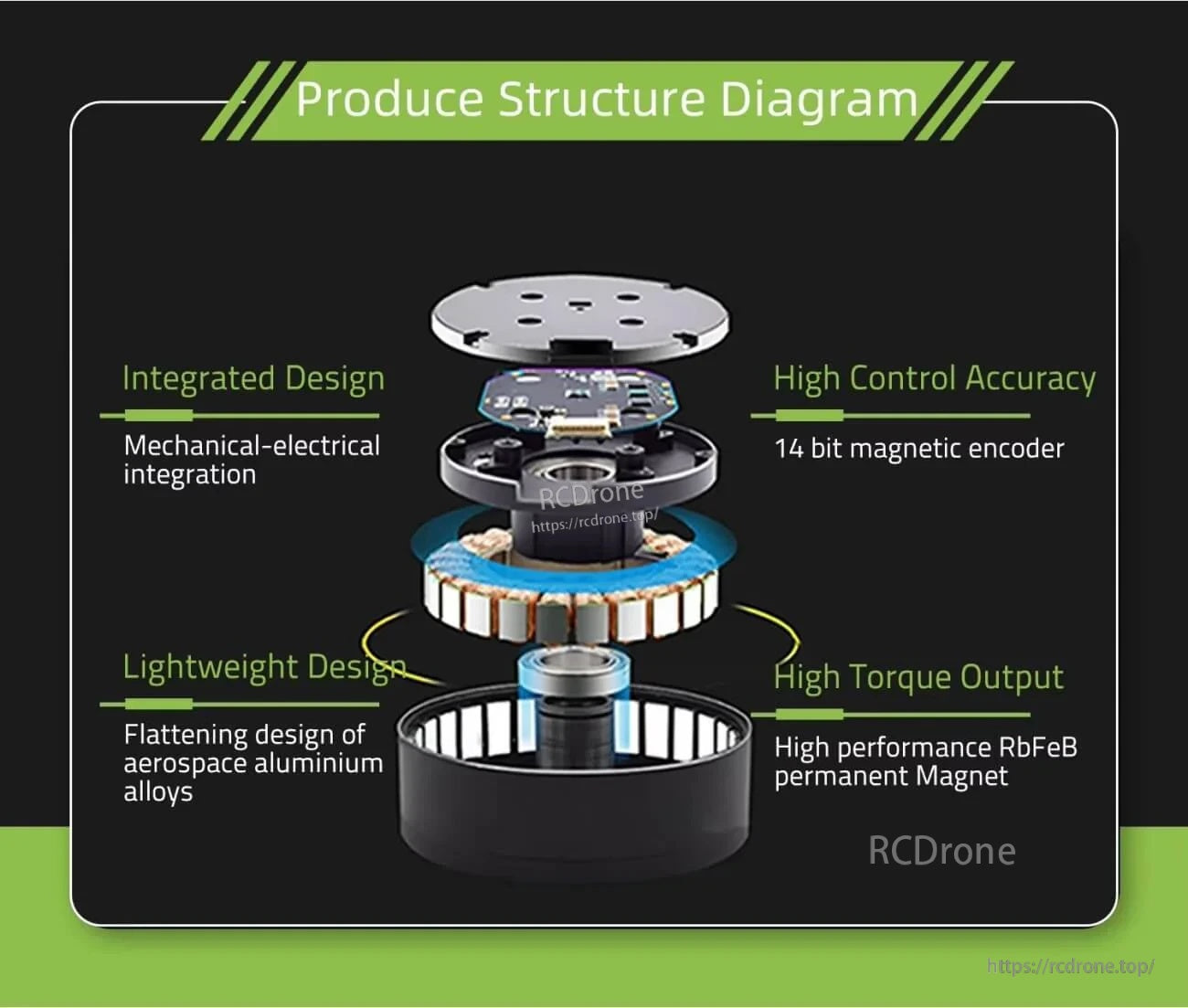
Zintegrowana konstrukcja mechaniczno-elektryczna utrzymuje siłownik w kompaktowej formie, jednocześnie wspierając precyzyjną kontrolę w pętli zamkniętej dla stawów robota.
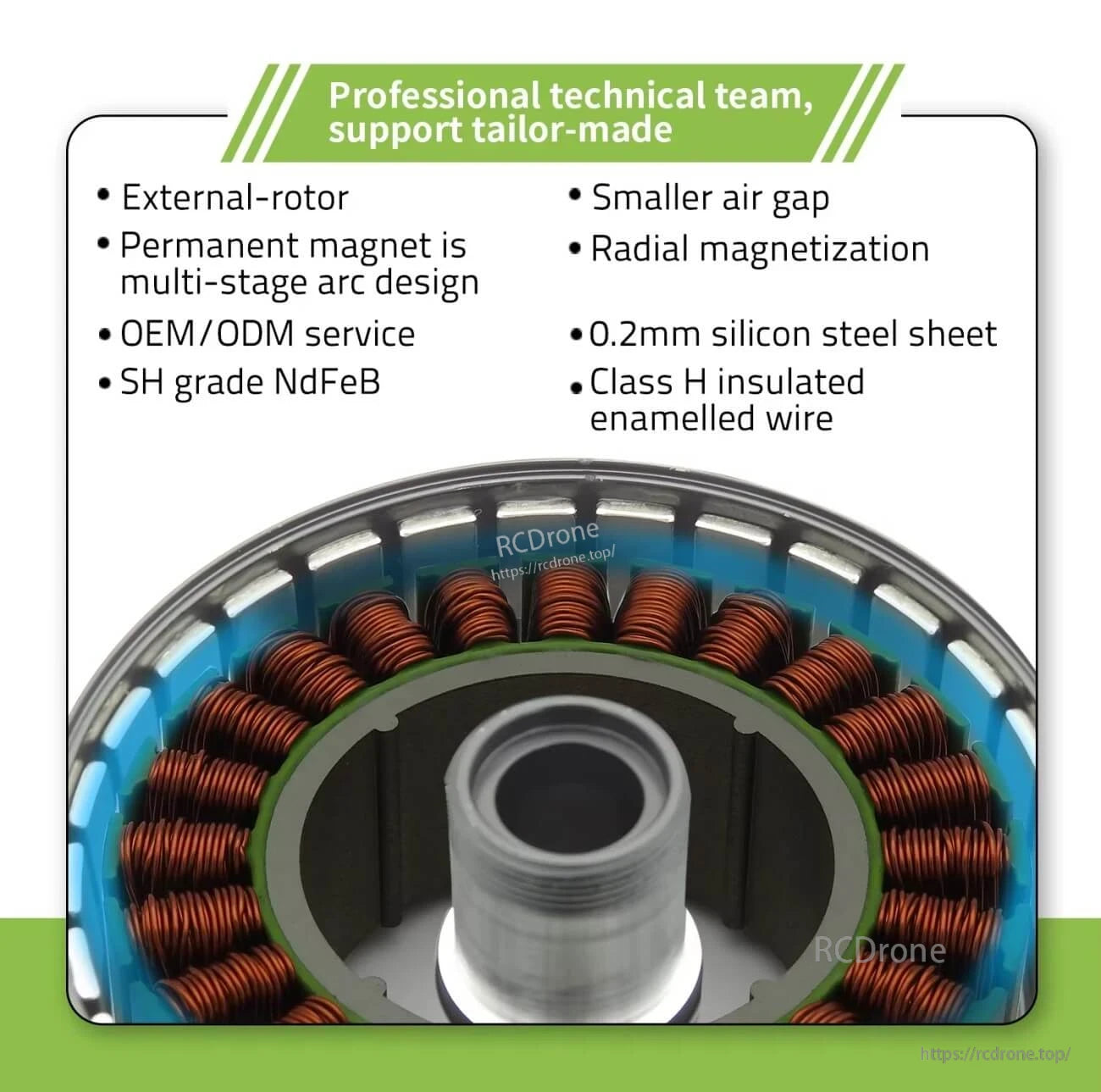
Układ zewnętrznego wirnika i ciasny projekt szczeliny powietrznej pomagają dostarczać responsywny moment obrotowy w lekkim formacie silnika stawowego.
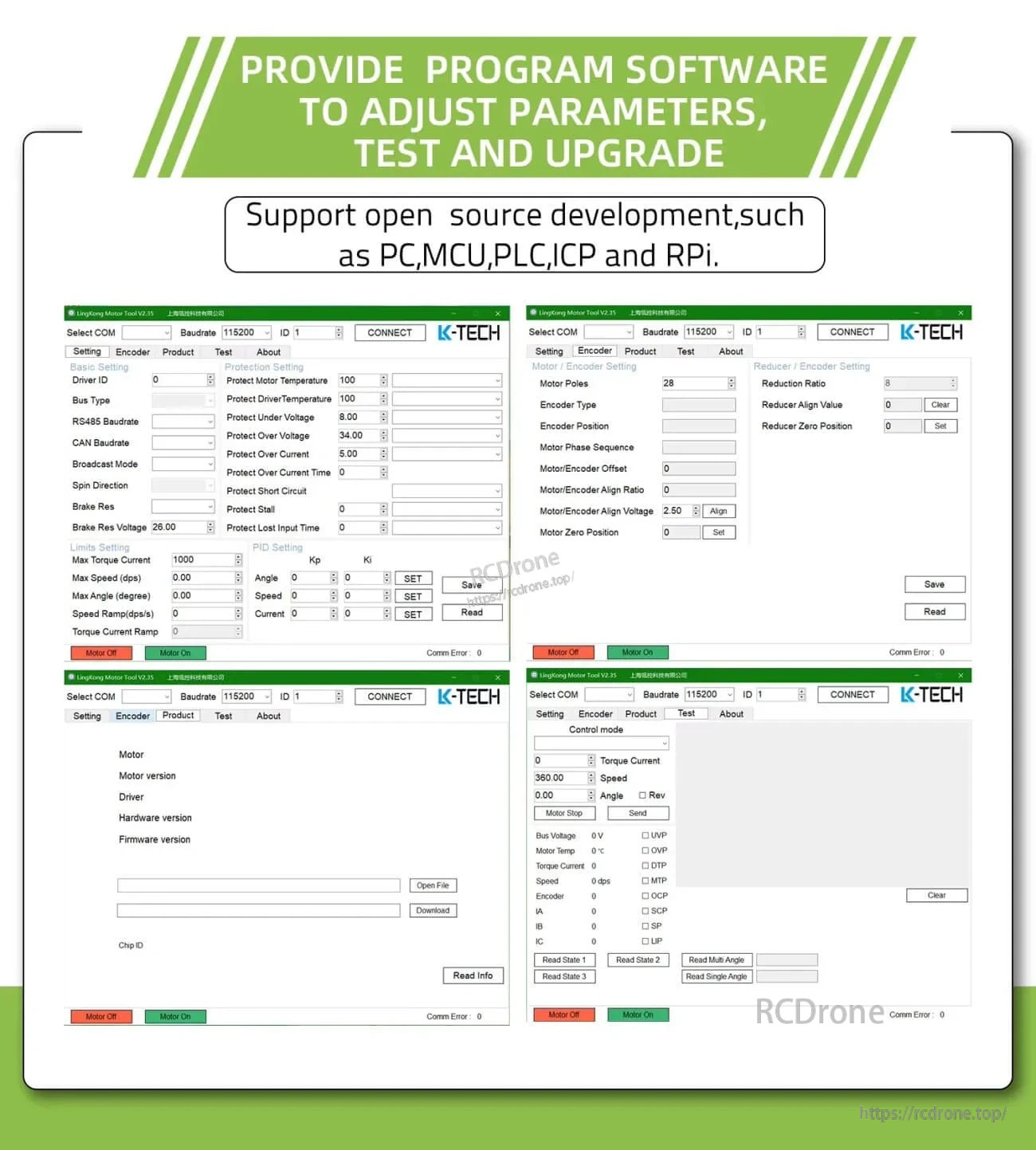
Oprogramowanie na PC jest dostępne do konfiguracji parametrów, diagnostyki i aktualizacji oprogramowania układowego, gdy jest używane z zalecanym napędem DF70V2.

Related Collections



