



LKMTECH MF9010-V2 Silnik 24V Zintegrowany Silnik Serwo o Wysokim Momencie z Enkoderem 18bit, RS485/CAN, Sterownik DF70v2
LKMTECH MF9010-V2 Silnik 24V Zintegrowany Silnik Serwo o Wysokim Momencie z Enkoderem 18bit, RS485/CAN, Sterownik DF70v2
LKMTECH
Nie można załadować gotowości do odbioru
Przegląd
Silnik LKMTECH MF9010-V2 to zintegrowane rozwiązanie silnikowe zaprojektowane do zastosowań wymagających lekkiej konstrukcji, wysokiej precyzji sterowania i wysokiego momentu obrotowego. MF9010 v2 zawiera aktualizacje produktu, takie jak zwiększenie rozdzielczości enkodera z 14 bitów do 18 bitów, optymalizację momentu obrotowego, wsparcie dla wejścia PWM oraz komunikację CAN/RS485 z różnymi prędkościami transmisji.
Kluczowe cechy
- Zintegrowany design; lekka konstrukcja; wysoka dokładność sterowania; wysoka moc momentu obrotowego
- Rozdzielczość enkodera: 14bit zaktualizowana do 18bit
- Optymalizacja momentu obrotowego
- Obsługuje wejście PWM
- Wsparcie komunikacji CAN i RS485 dla różnych prędkości transmisji
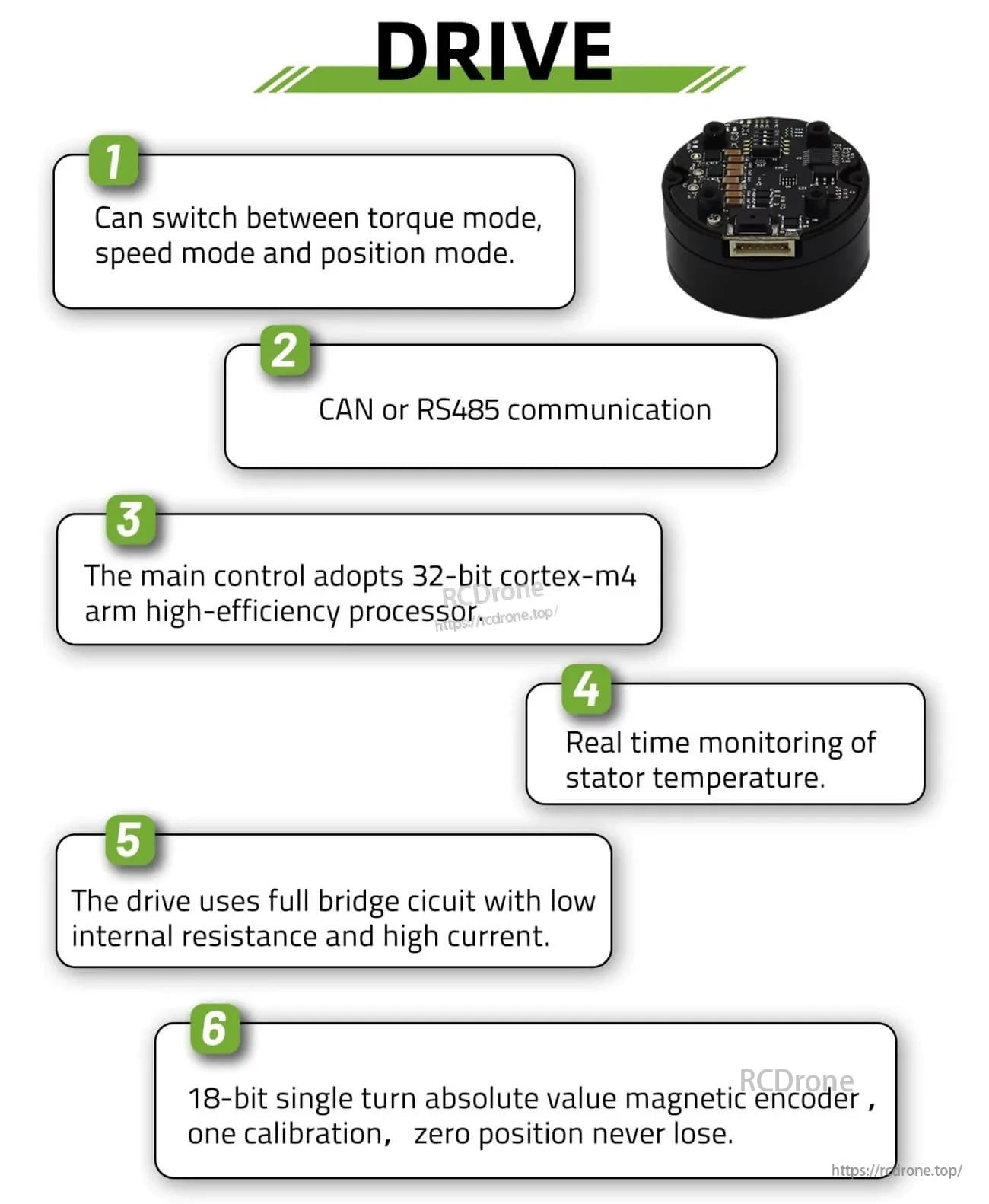
- Napęd może przełączać się między trybem momentu obrotowego, trybem prędkości i trybem pozycji
- Główna kontrola wykorzystuje 32-bitowy procesor ARM cortex-m4 o wysokiej wydajności
- Monitorowanie temperatury stojana w czasie rzeczywistym
- Napęd wykorzystuje pełny mostek z niską rezystancją wewnętrzną i wysokim prądem
- 18-bitowy enkoder magnetyczny o pojedynczym obrocie; jedna kalibracja; pozycja zerowa nigdy nie ginie
- Oprogramowanie programowe dostarczone do dostosowywania parametrów, testowania i aktualizacji
- Wsparcie dla rozwoju open source, takiego jak PC, MCU, PLC, ICP i RPi
Zastosowania
- Roboty humanoidalne
- Ramiona Robotyczne
- Egzoszkielety
- Roboty Czworonożne
- Pojazdy AGV
- Roboty ARU
- Kamera PTZ
- Laser Lidar
- Robot Inspekcyjny Stacji Zasilającej
- Inspekcja Przemysłowa
Specyfikacje Techniczne
| Parametr | MF9010v2 (17 Obrotów) | MF9010v2 (35 Obrotów) |
|---|---|---|
| Nazwa Przedmiotu | MF9010v2 | MF9010v2 |
| Obroty | 17 | 35 |
| Napięcie Nominalne | 24V | 24V |
| Maksymalna Prędkość | 1465RPM | 690RPM |
| Moment Obrotowy Nominalny | 1.09N.m | 1.07N.m |
| Prędkość nominalna | 1080RPM | 450RPM |
| Prąd nominalny | 6.66A | 3.27A |
| Maksymalna moc | 215W | 128W |
| Maksymalny moment | 2.2N.m | 4.1N.m |
| Stała prędkości | 45rpm/V | 18.8rpm/V |
| Stała momentu | 0.16N.m/A | 0.33N.m/A |
| Typ uzwojenia | Y | Y |
| Opór fazy | 0.29Ω | 1.15Ω |
| Indukcyjność fazy | 0.53mH | 3mH |
| Polary silnika | 28 | 28 |
| Inercja wirnika | 2860gcm² | 2860gcm² |
| Temperatura silnika | TAK | TAK |
| Obciążenie nominalne łożyska | 650N | 650N |
| Waga silnika | 525g | 525g |
| Rekomendowany napęd | DF70v2 | DF70v2 |
| Napięcie wejściowe napędu | 7.4-32V | 7.4-32V |
| Komunikacja | RS485 LUB CAN | RS485 LUB CAN |
| Częstotliwość komunikacji | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Enkoder | Enkoder magnetyczny 18-bitowy | Enkoder magnetyczny 18-bitowy |
| Prędkość baud enkodera (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Prędkość baud (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Tryb sterowania | Pętla momentu (24KHz)/Pętla prędkości (8KHz)/Pętla pozycji (8KHz) | Pętla momentu (24KHz)/Pętla prędkości (8KHz)/Pętla pozycji (8KHz) |
| Krzywa przyspieszenia | Przyspieszenie trapezowe | Przyspieszenie trapezoidalne |
Krzywa charakterystyki silnika (Referencja)
- Legendy KRZYWEJ CHARAKTERYSTYKI SILNIKA: Prąd wejściowy DC, Sprawność, Moc wyjściowa, Moment obrotowy
- Etykiety krzywe pokazane: MF9010-17T i MF9010-35T
Podręczniki / Dokumenty
W celu uzyskania wskazówek dotyczących wyboru i wsparcia w integracji, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/ .
Szczegóły

MF9010 V2 łączy silnik, enkoder i gotową do użycia integrację dla kompaktowych konstrukcji, które potrzebują precyzyjnego, wysokotorowego sterowania ruchem.
Wielokrotne tryby sterowania i łączność CAN/RS485 ułatwiają dostosowanie aktuatora do różnych stawów robotów i osi automatyzacji.
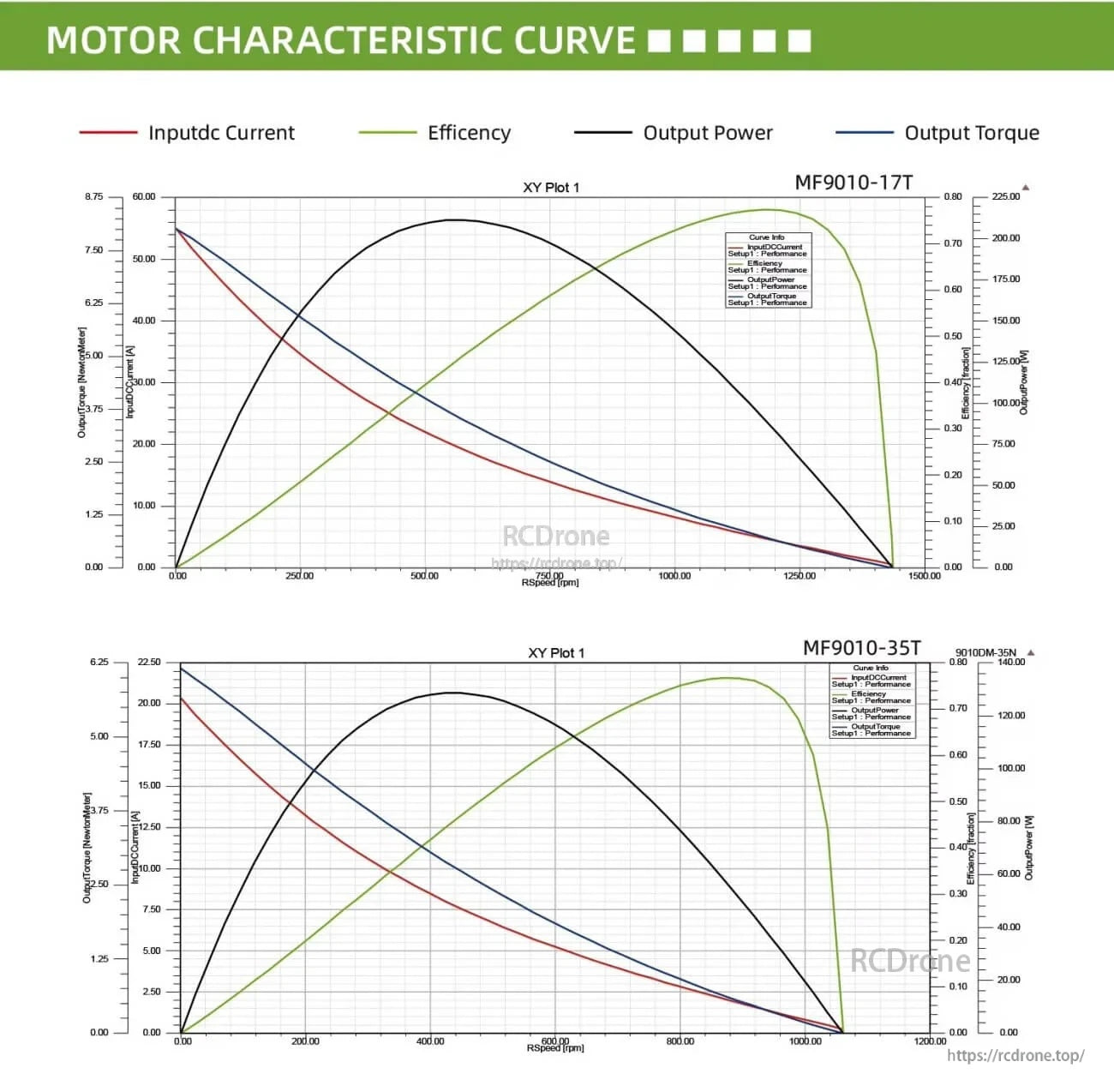
Krzywe wydajności pomagają porównać uzwojenia 17-zwojowe i 35-zwojowe dla docelowej prędkości, momentu obrotowego i zakresu wydajności.
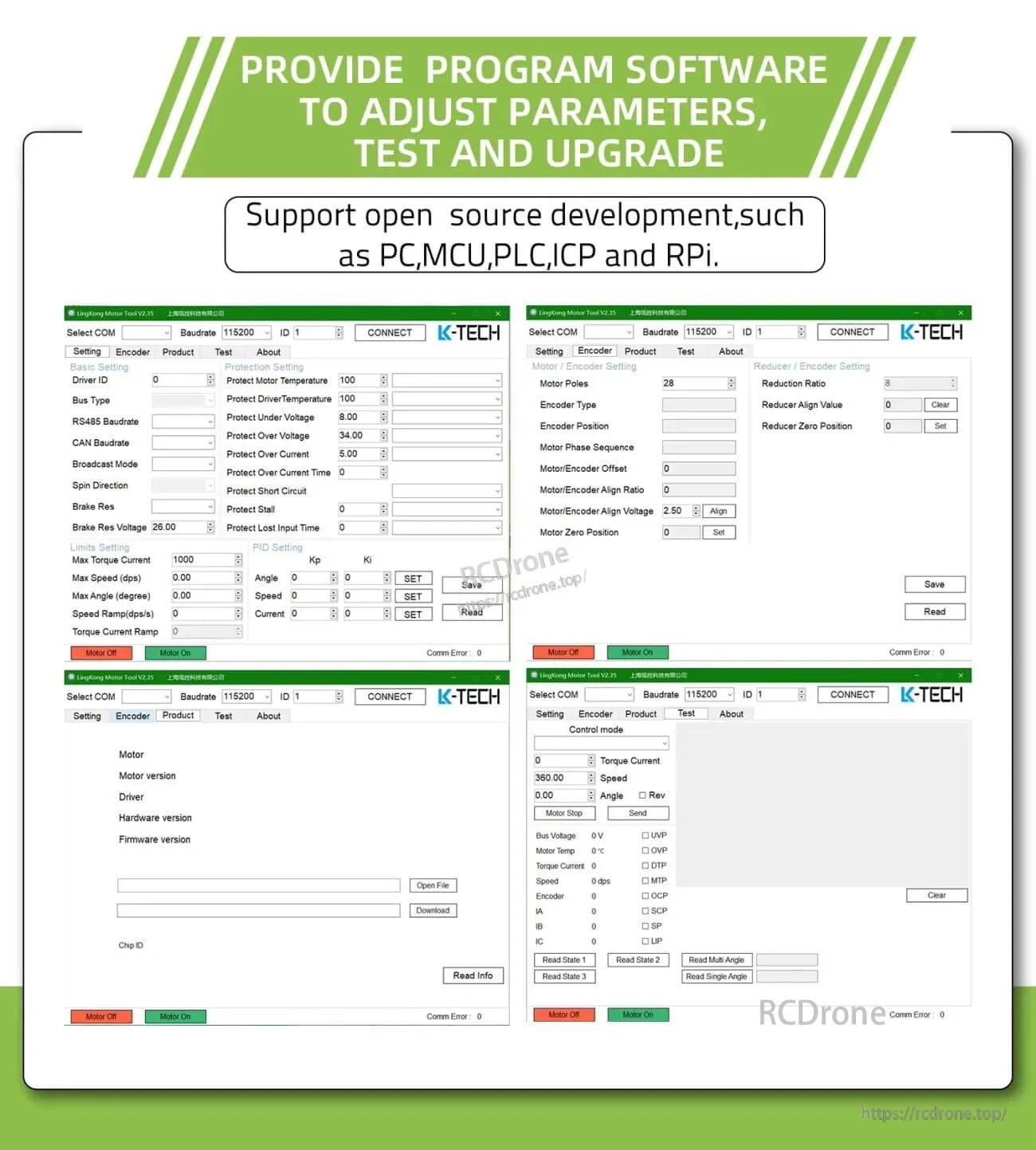
Oprogramowanie konfiguracyjne jest dostarczane do regulacji parametrów, testowania i aktualizacji podczas uruchamiania i konserwacji.
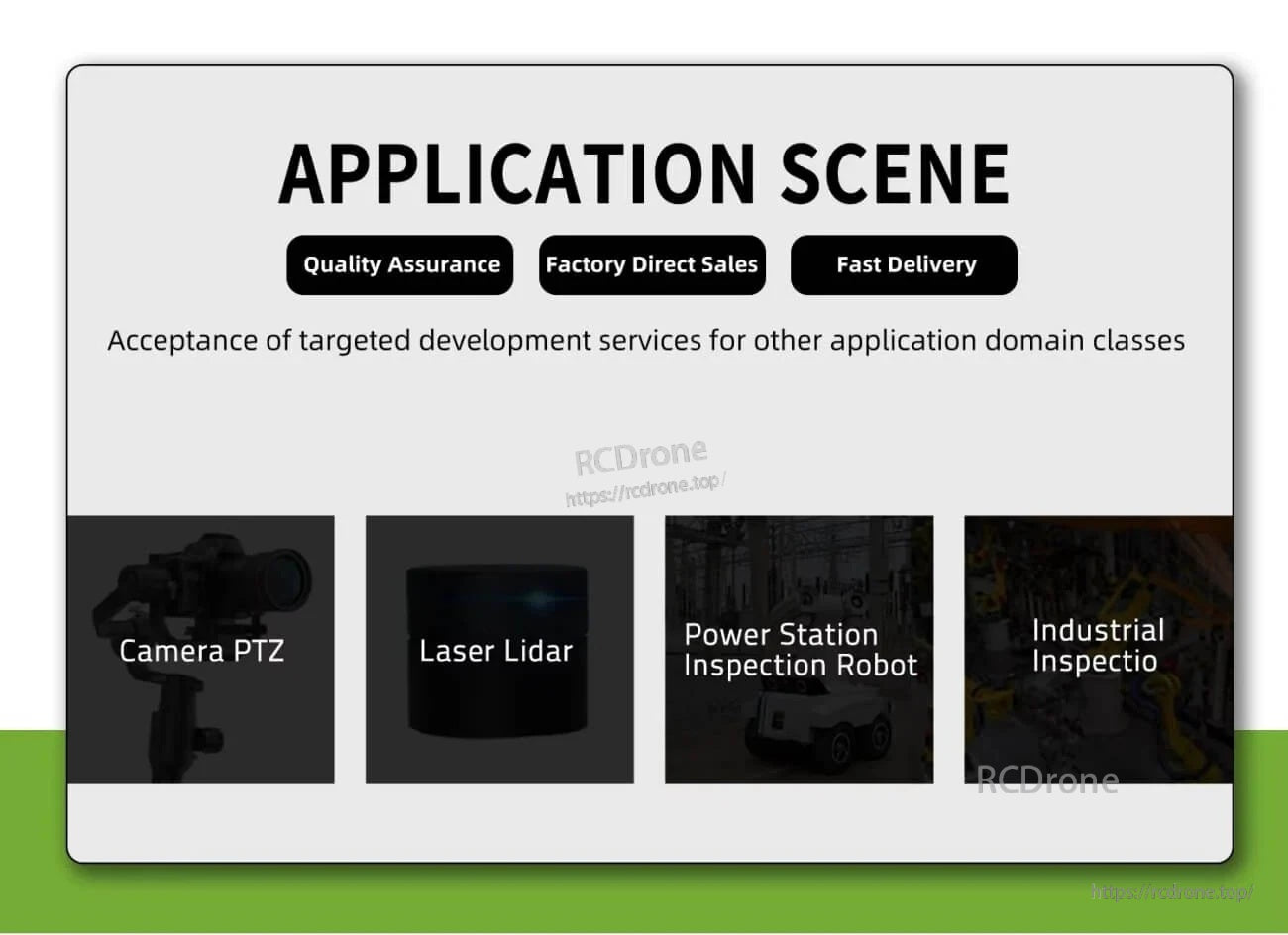
Typowe zastosowania obejmują systemy PTZ i lidar, a także roboty inspekcyjne i inne projekty automatyzacji mobilnej.
Related Collections



