




LKMTECH MG4005-V2 Silnik bezszczotkowy z reduktorem 1:10 PG4210, RS485/CAN, enkoder 18-bitowy
LKMTECH MG4005-V2 Silnik bezszczotkowy z reduktorem 1:10 PG4210, RS485/CAN, enkoder 18-bitowy
LKMTECH
Nie można załadować gotowości do odbioru
Przegląd
Silnik LKMTECH MG4005-V2 to moduł silnika bezszczotkowego zaprojektowany do aktorów robotycznych. Integruje reduktor planetarny PG4210 (1:10) oraz 18-bitowy enkoder magnetyczny, z komunikacją za pośrednictwem RS485 lub CAN do sterowania momentem obrotowym/prędkością/pozycją w pętli zamkniętej.
Kluczowe cechy
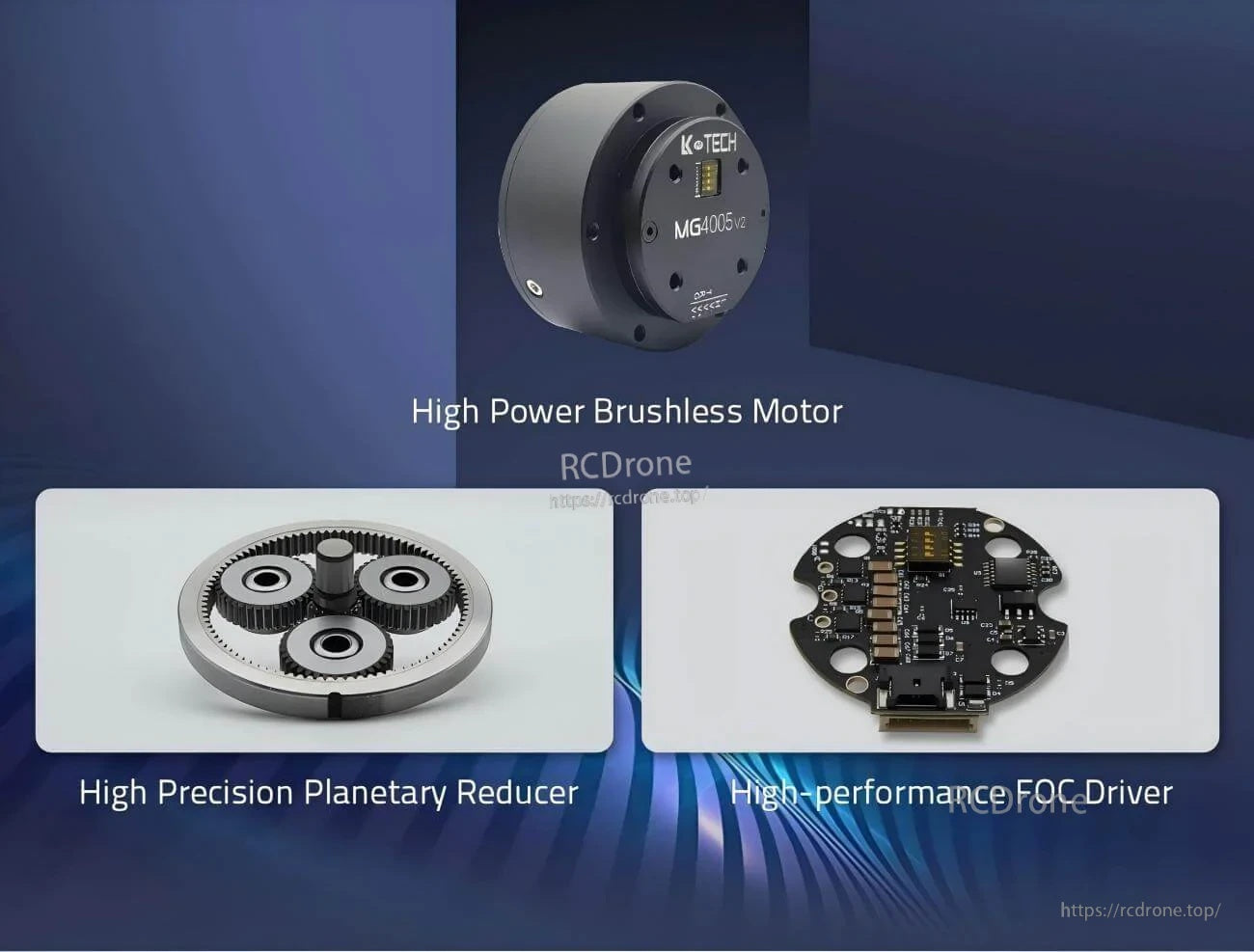
- Silnik bezszczotkowy o wysokiej mocy
- Reduktor planetarny o wysokiej precyzji: luz ≤10 arcmin, stosunek 1:10
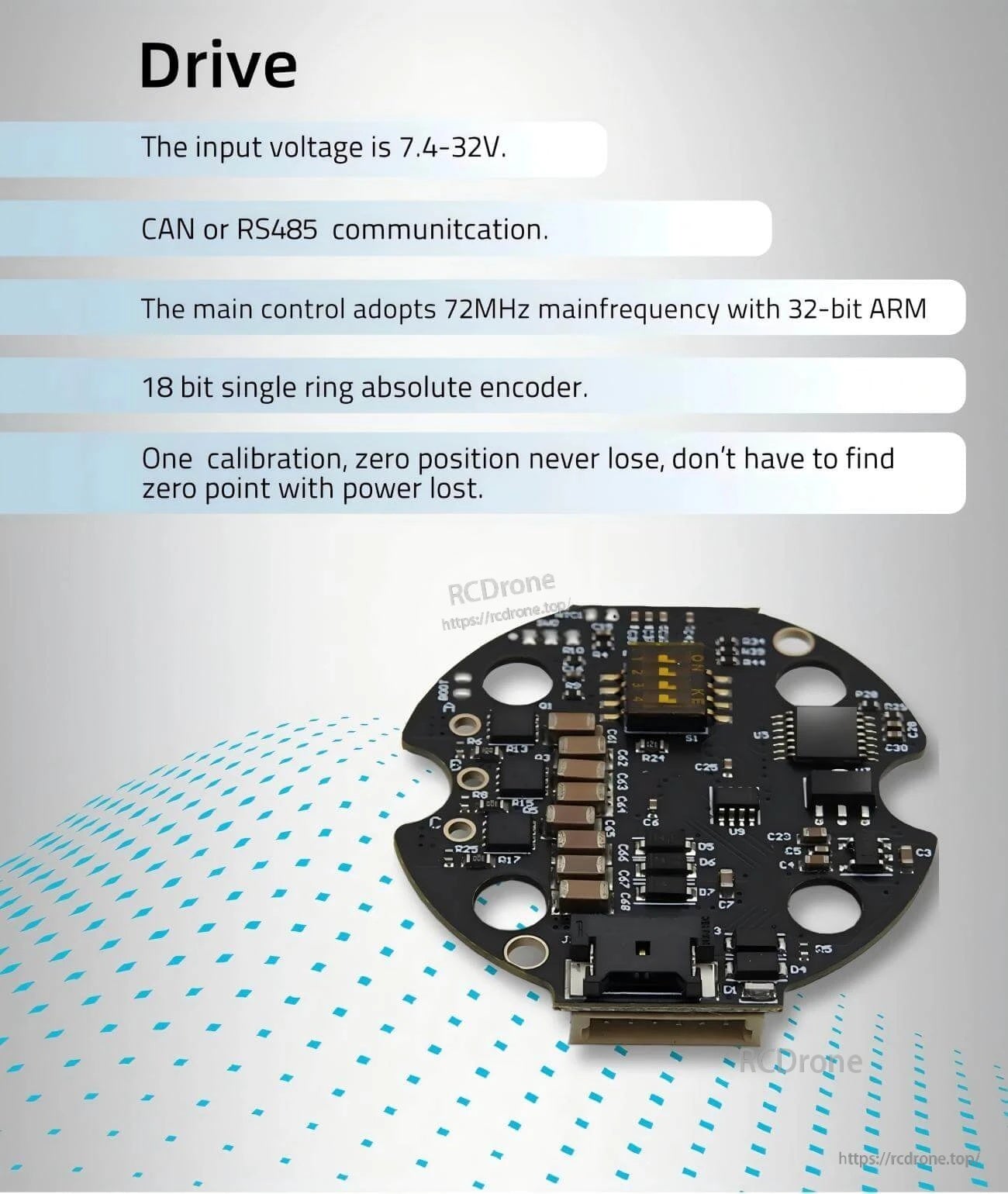
- 18-bitowy enkoder absolutny z pojedynczym pierścieniem; jedna kalibracja, pozycja zerowa jest zachowywana po utracie zasilania
- Komunikacja: CAN lub RS485
- Napięcie wejściowe napędu: 7.4-32V
- Główna kontrola: częstotliwość główna 72MHz z 32-bitowym ARM
- Obsługuje wejście PWM; zoptymalizowany moment obrotowy silnika dla płynniejszej pracy
- Wsparcie dla oprogramowania narzędzi silnikowych: regulacja parametrów, testowanie i aktualizacja oprogramowania układowego
- Obsługuje otwarte platformy rozwojowe, takie jak PC, MCU, PLC, ICP i RPi
Specyfikacje
| Nazwa przedmiotu | MG4005-V2 |
| Napięcie znamionowe | 24V |
| Maksymalna prędkość | 320RPM |
| Prędkość znamionowa | 255RPM |
| Moment obrotowy znamionowy | 1N.m |
| Maksymalny moment obrotowy | 2.5N.m |
| Prąd znamionowy | 1.8A |
| Maksymalna moc | 65W |
| Stała prędkości | 106.3rpm/V |
| Stała momentu | 0.06N.m/A |
| Obroty | 28 |
| Typ uzwojenia | Y |
| Opór fazy | 1.4Ω |
| Indukcyjność fazy | 0.5mH |
| Poli silnika | 28 |
| Bezładność wirnika | 140gcm² |
| Temperatura silnika | TAK |
| Typ reduktora | PG4210 |
| Stosunek redukcji | 1:10 |
| Luzy | ≤10 arcmin |
| Obciążenie nominalne łożyska | 1000N |
| Waga silnika | 154g |
| Zalecany napęd | DF40 |
| Napięcie wejściowe napędu | 7.4-32V |
| Komunikacja | RS485 LUB CAN |
| Częstotliwość komunikacji | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Enkoder | Enkoder magnetyczny 18-bitowy |
| Prędkość baud enkodera (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Prędkość baud (CAN) | 1M |
| Tryb sterowania | Obwód momentu (24KHz)/Obwód prędkości (8KHz)/Obwód pozycji (4KHz) |
| Krzywa przyspieszenia | Przyspieszenie trapezowe |
Definicja interfejsu
| Interfejs | Uwaga |
|---|---|
| A/L | RS485-A lub CAN-L |
| B/H | RS485-B lub CAN-H |
| V- | Ujemne zasilanie |
| V- | Zasilanie ujemne |
| V+ | Zasilanie dodatnie |
| V+ | Zasilanie dodatnie |
| T | Transmiter UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
Aplikacje
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety / roboty noszone
- Roboty czworonożne / pies robot
- Pojazdy AGV / samochód AGV
- Roboty ARU
Podręczniki
W celu uzyskania informacji o okablowaniu, integracji i wsparciu posprzedażowym, skontaktuj się z https://rcdrone.top/ lub wyślij e-mail na [email protected] .
Szczegóły

Stworzony do aktowania robotyki, MG4005‑V2 łączy w sobie kompaktowy silnik bezszczotkowy silnik i przekładnię w jednym łatwym do zintegrowania module.
Dopasowany silnik, reduktor planetarny i płytka sterująca pomagają uprościć kontrolę momentu obrotowego, prędkości i pozycji w pętli zamkniętej.
Komunikacja CAN lub RS485 oraz szeroki zakres wejściowy 7.4–32V ułatwiają integrację z powszechnymi kontrolerami robotyki.

Porównanie wersji podkreśla aktualizację enkodera MG4005‑V2 do 18-bitowego sprzężenia zwrotnego i wsparcia dla wejścia PWM.
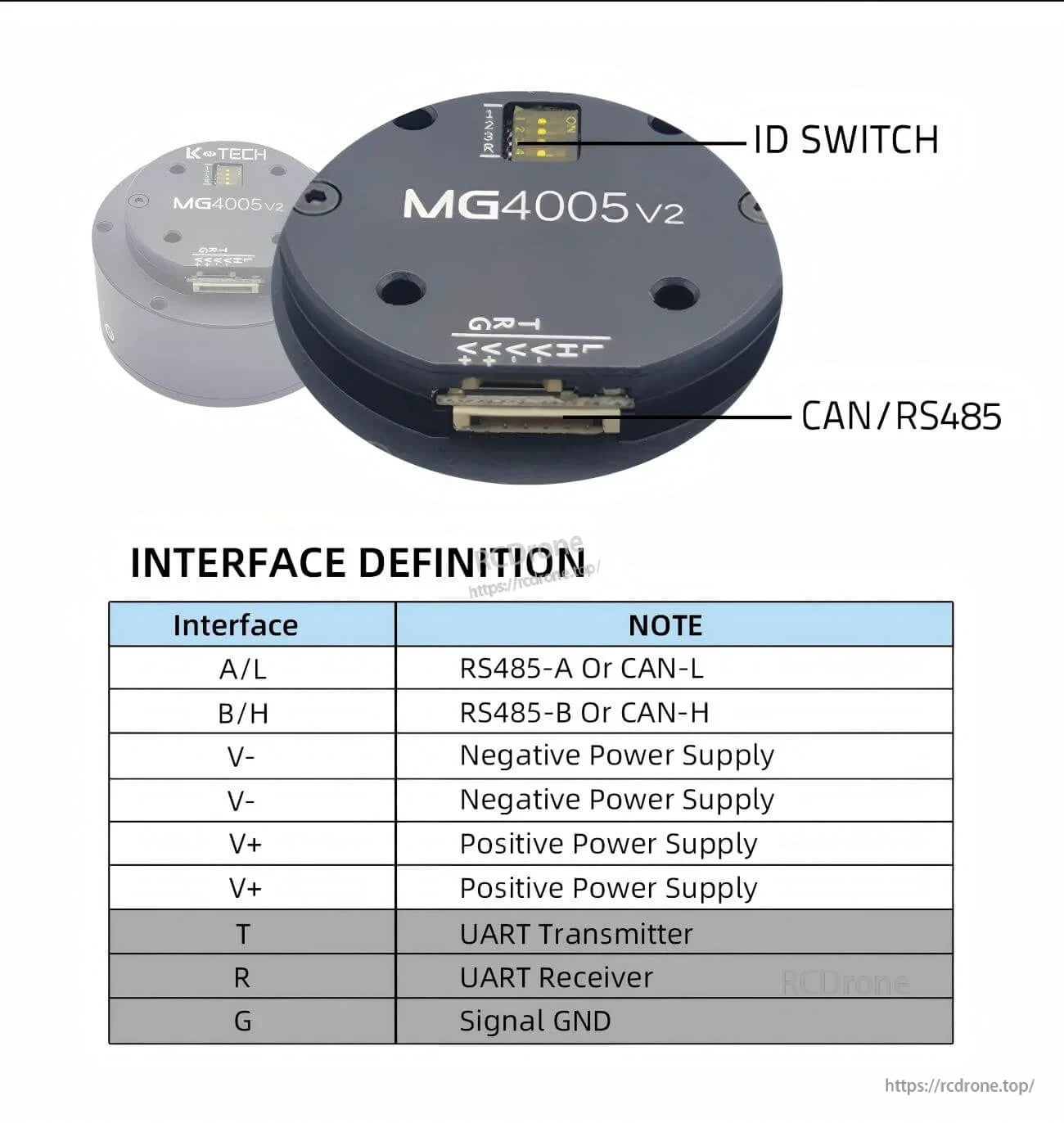
Definicje pinów i wbudowany przełącznik ID pomagają uprościć okablowanie wieloosiowe i konfigurację magistrali.

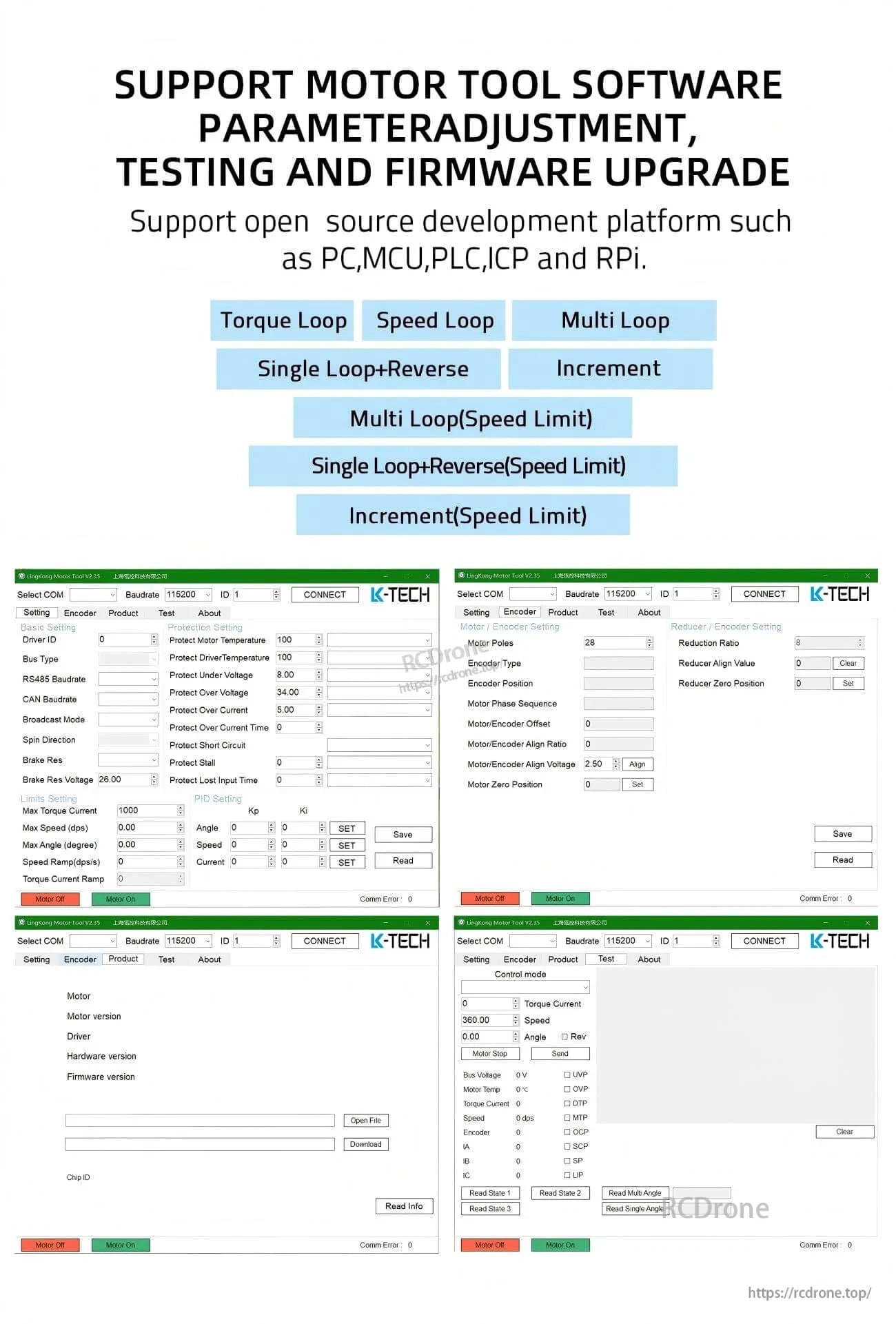
Oprogramowanie narzędziowe silnika wspiera dostosowywanie parametrów, testowanie i aktualizacje oprogramowania podczas konfiguracji i konserwacji.

Related Collections




