




LKMTECH MG4005E-i10-V3 Silnik z przekładnią planetarną, 24V 1:10 PG4210, RS485/CAN Podwójny Enkoder
LKMTECH MG4005E-i10-V3 Silnik z przekładnią planetarną, 24V 1:10 PG4210, RS485/CAN Podwójny Enkoder
LKMTECH
Nie można załadować gotowości do odbioru
Przegląd
Silnik LKMTECH MG4005E-i10-V3 to silnik z przekładnią planetarną , zaprojektowany do ruchu robotycznego i automatycznych stawów wymagających kompaktowej przekładni, sprzężenia zwrotnego w zamkniętej pętli oraz komunikacji szeregowej. Integruje reduktor planetarny (PG4210, 1:10) oraz podwójne absolutne enkodery magnetyczne (strona silnika + strona reduktora) dla precyzyjnej kontroli.
Kluczowe cechy
- Silnik planetarny: wysoka moc, duży moment obrotowy i wysoka precyzja
- Silnik bezszczotkowy + precyzyjna redukcja planetarna
- Kontrola FOC (wymagany napęd/sterownik)
- Podwójne enkodery: 18-bitowy enkoder absolutny jednego obrotu (strona silnika) + 14-bitowy enkoder absolutny jednego obrotu (strona reduktora)
- Enkoder po stronie reduktora wspiera wyjście wartości absolutnej jednego obrotu i zapamiętuje punkt zerowy po wyłączeniu zasilania
- Komunikacja RS485 lub CAN bus
- Wsparcie dla regulacji parametrów za pomocą oprogramowania PC, testów i aktualizacji oprogramowania układowego
- Wsparcie dla otwartych platform rozwojowych: PC, MCU, PLC, komputer przemysłowy i Raspberry Pi
- Wielokrotne tryby sterowania: Tryb momentu, Tryb prędkości, Tryb kontroli wieloobrotowej, Tryb pozycji + kierunku jednego obrotu, Tryb pozycji inkrementalnej, Tryb kontroli wieloobrotowej (z ograniczeniem prędkości), Tryb pozycji + kierunku jednego obrotu (z ograniczeniem prędkości), Tryb pozycji inkrementalnej (z ograniczeniem prędkości)
- Podwójne interfejsy czujników temperatury monitorują temperatury silnika i napędu w czasie rzeczywistym
- Zarezerwowana funkcja hamulca (Hamulce / Zwolnienie hamulca)
- Wielokrotne funkcje ochronne wymienione: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP
W celu wsparcia integracji i potwierdzenia przed sprzedażą, skontaktuj się z https://rcdrone.top/ lub wyślij e-mail na [email protected].
Specyfikacje
| Nazwa przedmiotu | MG4005E-i10-V3 |
| Napięcie znamionowe | 24V |
| Maksymalna prędkość | 320RPM |
| Moment obrotowy znamionowy | 1 N.m |
| Prędkość znamionowa | 255RPM |
| Prąd znamionowy | 1.8A |
| Maksymalna moc | 65W |
| Maksymalny moment obrotowy | 2.5 N.m |
| Stała prędkości | 106.3rpm/V |
| Stała momentu obrotowego | 0.06 N.m/A |
| Obroty | 28 |
| Typ uzwojenia | Y |
| Opór fazy | 1.4Ω |
| Indukcyjność fazy | 0.5mH |
| Polary silnika | 28 |
| Inercja wirnika | 140gcm² |
| Temperatura silnika | TAK |
| Typ reduktora | PG4210 |
| Stosunek redukcji | 1:10 |
| Luzy | ≤10 arcmin |
| Obciążenie nominalne łożyska | 1000N |
| Waga silnika | 183g |
| Zalecany napęd | DG40E |
| Napięcie wejściowe napędu | 7.4-32V |
| Komunikacja | RS485 lub CAN |
| Częstotliwość komunikacji | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Enkoder | Enkoder magnetyczny 18-bitowy (silnik) + 14-bitowy (reduktor) |
| Prędkość transmisji enkodera (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Prędkość transmisji (CAN) | 100K, 125K, 250K, 500K, 1M |
| Tryb sterowania | Pętla momentu (24KHz) / Pętla prędkości (8KHz) / Pętla pozycji (4KHz) |
| Krzywa przyspieszenia | Przyspieszenie trapezowe |
Definicja interfejsu
| Interfejs | Uwaga |
|---|---|
| A/H | RS485-A lub CAN-H |
| B/L | RS485-B lub CAN-L |
| V- | Zasilanie ujemne |
| V+ | Zasilanie dodatnie |
| A/H | RS485-A lub CAN-H |
| B/L | RS485-B lub CAN-L |
| T | Nadajnik UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
Aplikacje
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety / roboty noszone
- Roboty czworonożne / pies robot
- Pojazdy AGV / samochód AGV
- Roboty ARU
Podręczniki / Pliki
Szczegóły

MG4005E-i10-V3 łączy bezszczotkowy silnik z reduktorem planetarnym w kompaktowej formie do stawów robotycznych i osi automatyzacji.

Podwójne enkodery magnetyczne o pojedynczym obrocie zapewniają sprzężenie zwrotne po stronie silnika i wyjścia, z dedykowanym przełącznikiem ID do konfiguracji magistrali.
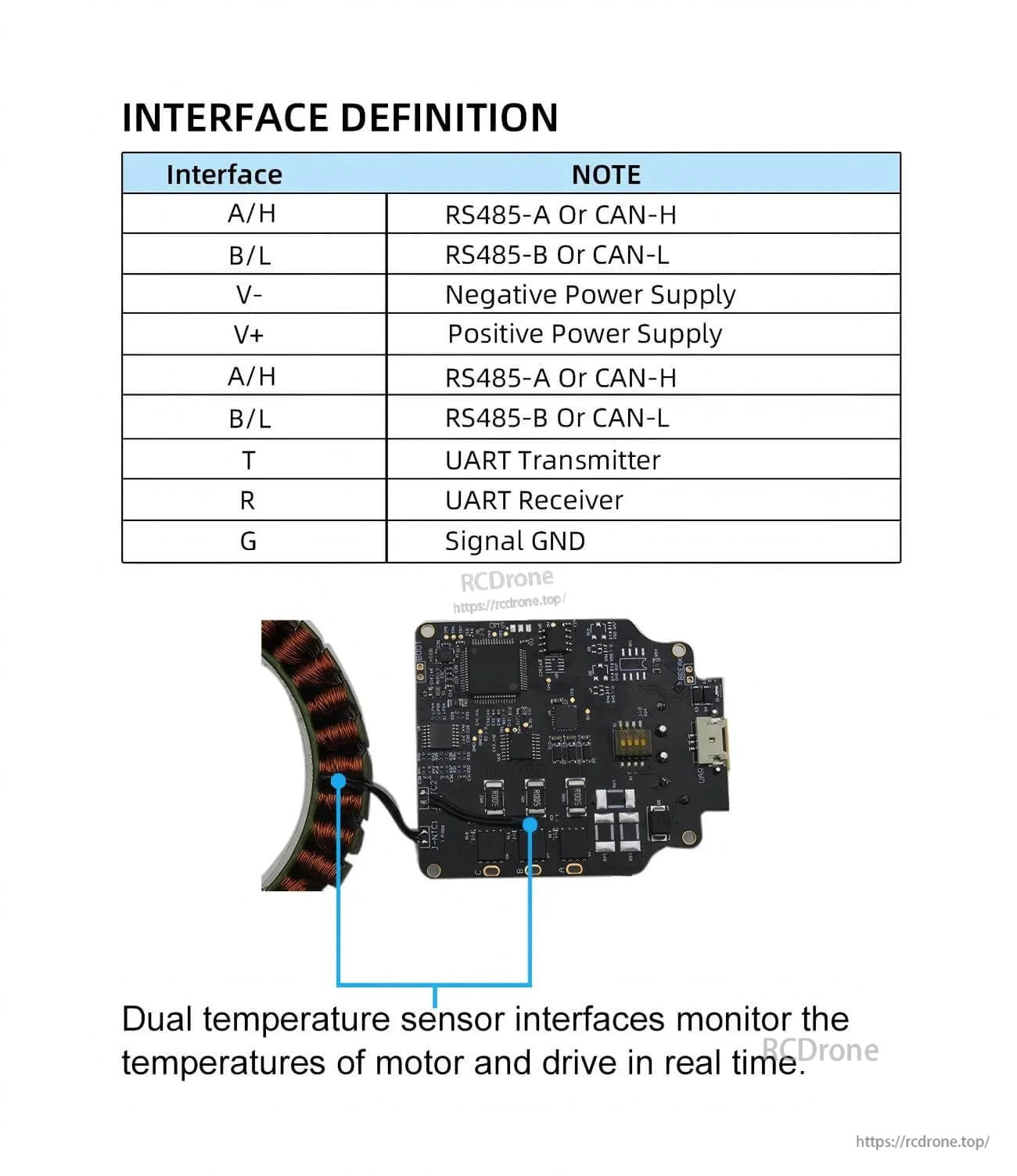
Okablowanie jest uproszczone dzięki wyraźnie zdefiniowanym zaciskom dla zasilania, komunikacji RS485/CAN oraz połączeń sygnałowych UART.
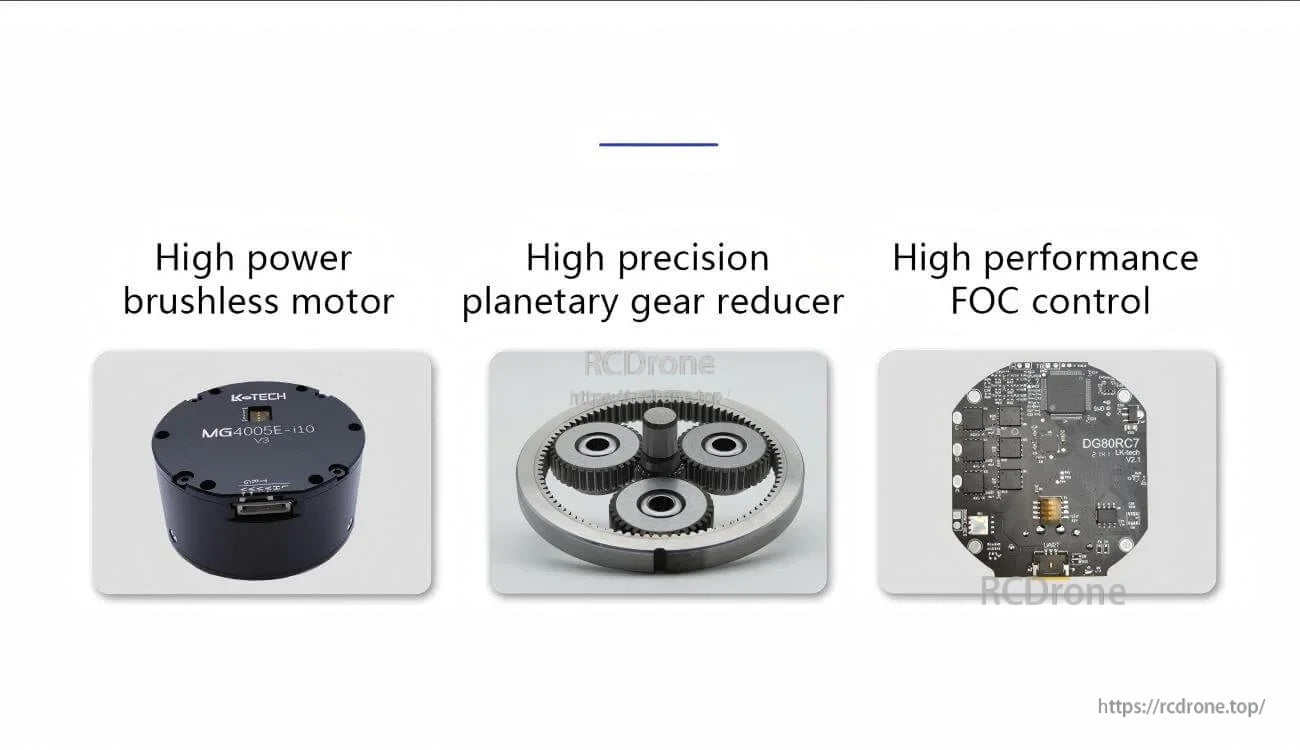
Silnik bezszczotkowy, precyzyjne przekładnie planetarne i kontrola FOC wspierają płynne dostarczanie momentu obrotowego i dokładną kontrolę ruchu.

Napęd obsługuje komunikację RS485 lub CAN oraz szeroki zakres napięcia wejściowego (7,4–32V) dla elastycznej integracji.
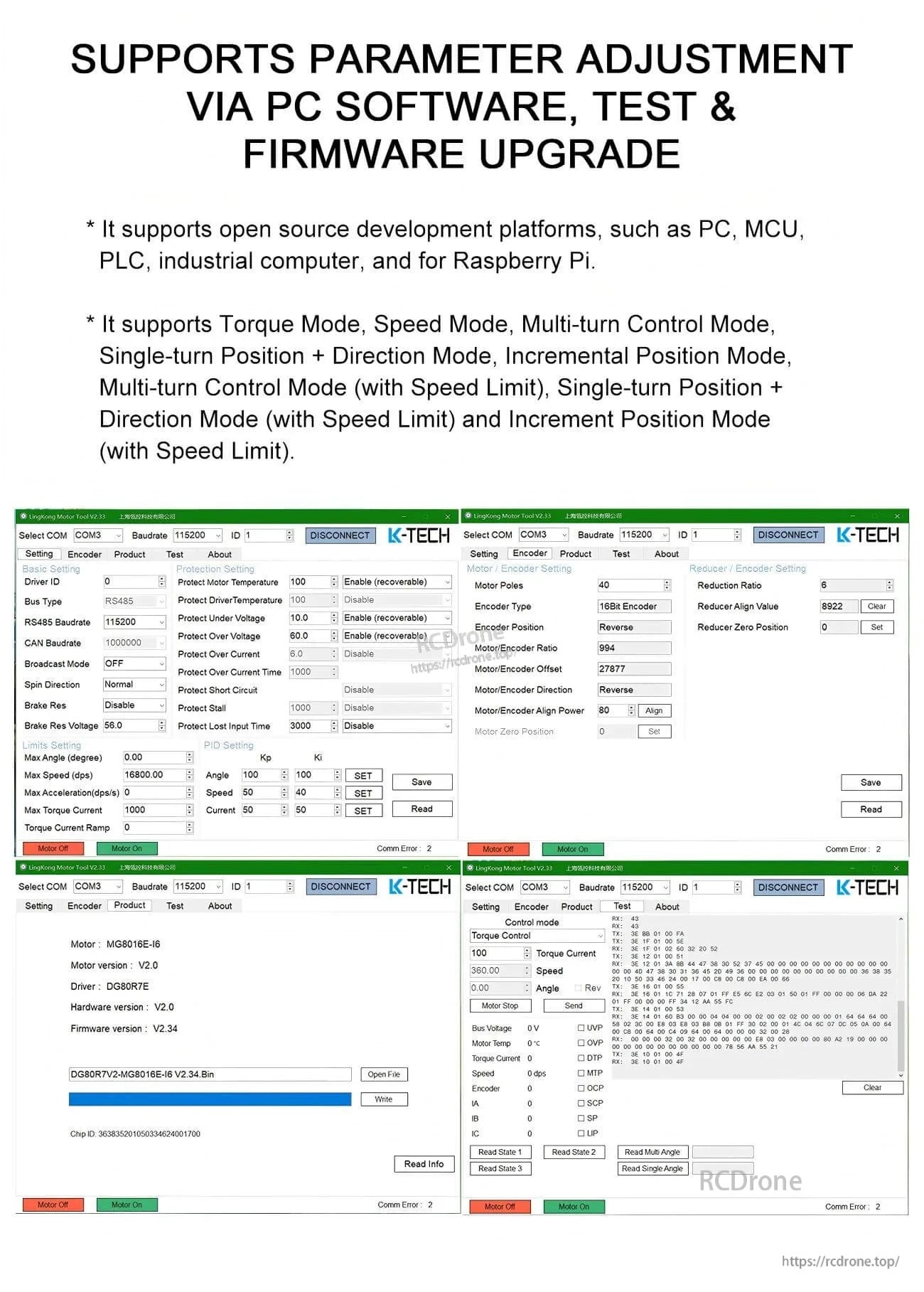
Oprogramowanie na PC umożliwia dostosowywanie parametrów, testy funkcjonalne oraz aktualizacje oprogramowania podczas uruchamiania i konserwacji.
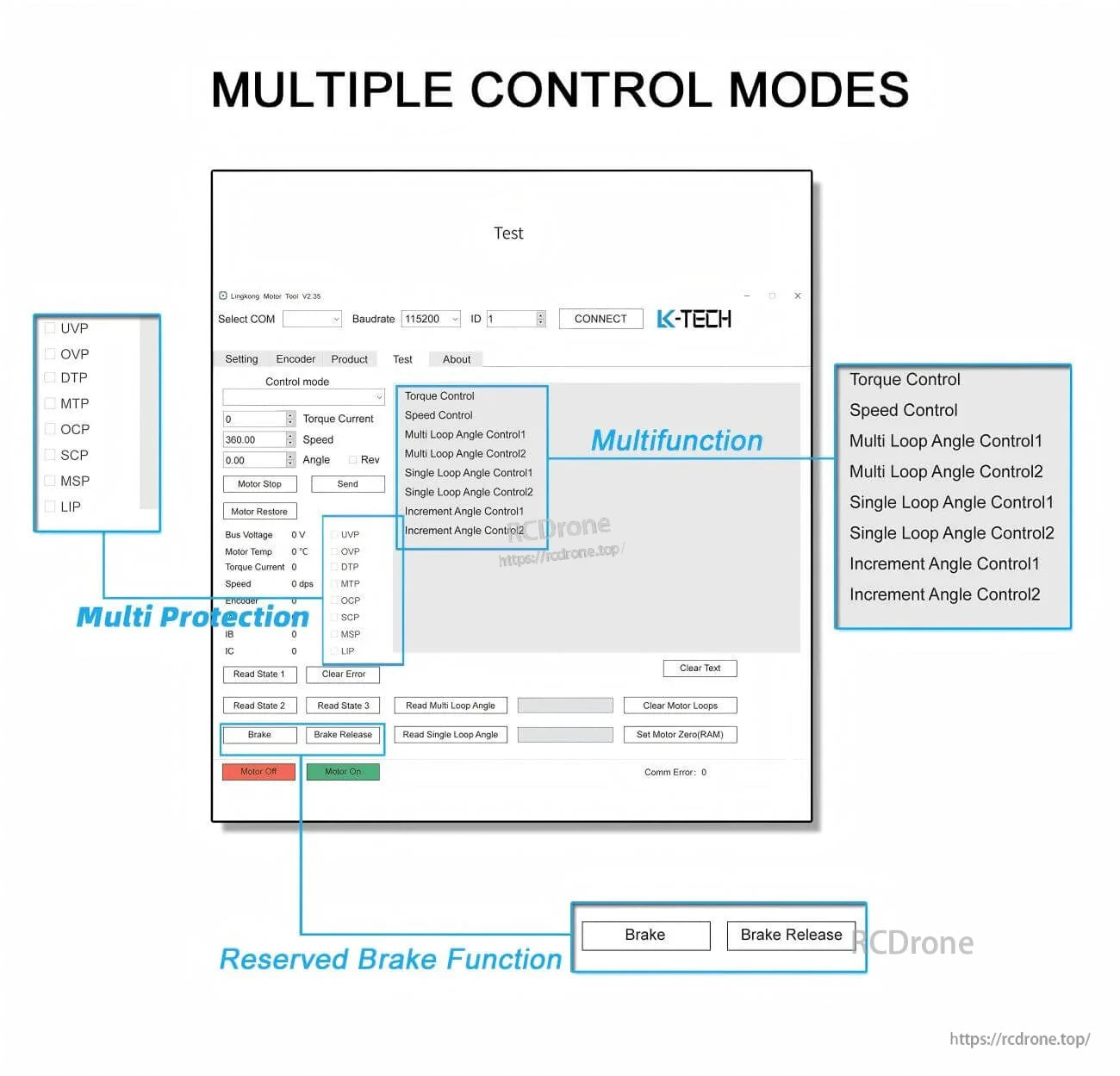
Wybierz spośród wielu trybów sterowania, takich jak kontrola momentu, prędkości i pozycji, z wbudowanym monitorowaniem statusu ochrony.
Zapewnia kompaktowe działanie w robotach mobilnych, ramionach przegubowych, czworonogach i robotyce noszonej.
Related Collections




