




LKMTECH MG4010E-i10-V3 Silnik 24V 320RPM 2,5N.m Przekładnia planetarna 1:10 RS485/CAN Enkoder
LKMTECH MG4010E-i10-V3 Silnik 24V 320RPM 2,5N.m Przekładnia planetarna 1:10 RS485/CAN Enkoder
LKMTECH
Nie można załadować gotowości do odbioru
Przegląd
Silnik LKMTECH MG4010E-i10-V3 to silnik bezszczotkowy silnik z reduktorem planetarnym i absolutnymi enkoderami magnetycznymi, zaprojektowany do robotów i siłowników automatyzacji, które wymagają wysokiej precyzji, dużego momentu obrotowego i stabilnej kontroli w pętli zamkniętej. Obsługuje komunikację RS485 lub CAN bus i współpracuje z zalecanym napędem DG40E (napięcie wejściowe 7.4-32V).
Kluczowe cechy
- Wysoka jakość wykonania; wysoka moc, duży moment obrotowy, wysoka precyzja
- Silnik bezszczotkowy o wysokiej mocy + precyzyjna przekładnia planetarna
- Wysokowydajna kontrola FOC (cecha związana z napędem)
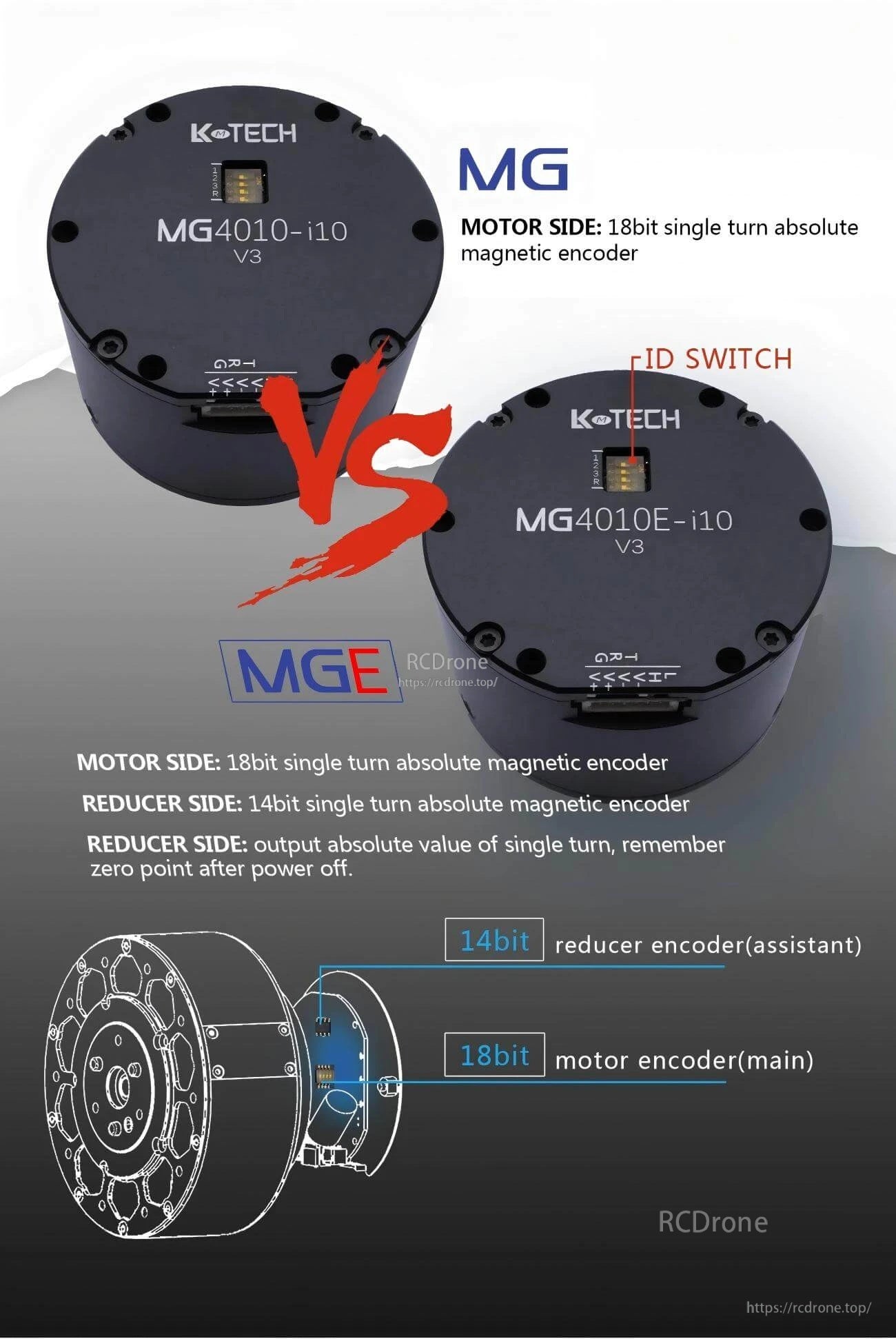
- Podwójne enkodery; zapamiętuje punkt zerowy po wyłączeniu zasilania (wyjście wartości bezwzględnej dla jednego obrotu)
- Enkoder po stronie silnika: 18-bitowy enkoder magnetyczny o wartości bezwzględnej dla jednego obrotu
- Enkoder po stronie przekładni: 14-bitowy enkoder magnetyczny o wartości bezwzględnej dla jednego obrotu
- Podwójne złącze czujnika temperatury do monitorowania temperatury silnika i sterownika w czasie rzeczywistym (temperatura silnika: TAK)
- Przełącznik ID (widoczny na obudowie silnika)
Specyfikacje
| Nazwa przedmiotu | MG4010E-i10-V3 |
| Napięcie znamionowe | 24V |
| Maksymalna prędkość | 320RPM |
| Prędkość znamionowa | 260RPM |
| Moment obrotowy oceniany | 2.5N.m |
| Max Moment obrotowy | 4.5N.m |
| Prąd znamionowy | 3.5A |
| Max Moc | 140W |
| Stała prędkości | 108.3rpm/V |
| Stała momentu obrotowego | 0.07N.m/A |
| Obroty | 14 |
| Typ uzwojenia | Y |
| Opór fazy | 0.604Ω |
| Indukcyjność fazy | 0.28mH |
| Polary silnika | 28 |
| Inercja wirnika | 202gcm² |
| Temperatura silnika | TAK |
| Typ reduktora | PG4210 |
| Stosunek redukcji | 1:10 |
| Luzy | ≤8 arcmin (tekst na obrazie również podaje: luz zębatkowy 6 arcmin) |
| Obciążenie nominalne łożyska | 1000N |
| Waga silnika | 250g |
| Rozmiar | Φ53*41 |
| Zalecany napęd | DG40E |
| Napięcie wejściowe napędu | 7.4-32V |
| Komunikacja | RS485 LUB CAN |
| Częstotliwość komunikacji | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Enkoder | 18bit(motor)+14bit(reduktor) Enkoder magnetyczny |
| Prędkość baud enkodera (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Prędkość baud (CAN) | 100K, 125K, 250K, 500K, 1M |
| Tryb sterowania | Pętla momentu (24KHz)/Pętla prędkości (8KHz)/Pętla pozycji (4KHz) |
| Krzywa przyspieszenia | Przyspieszenie trapezowe |
Definicja interfejsu
| A/H | RS485-A LUB CAN-H |
| B/L | RS485-B LUB CAN-L |
| V- | Ujemne zasilanie |
| V+ | Dodatnie zasilanie |
| A/H | RS485-A lub CAN-H |
| B/L | RS485-B lub CAN-L |
| T | Transmiter UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
Scenariusze aplikacji
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV / samochód AGV
- Roboty ARU
- Pies robot
- Robot noszony
W przypadku pytań dotyczących integracji (ustawienia RS485/CAN, wybór prędkości baud enkodera lub dopasowanie napędu), skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Podręczniki
Szczegóły

Zbudowany dla siłowników robotycznych, które potrzebują wysokiego momentu obrotowego, wysokiej precyzji i stabilnej kontroli w pętli zamkniętej.

Komunikacja RS485 lub CAN bus wspiera elastyczną integrację z powszechnymi kontrolerami robotów i napędami.
Podwójne enkodery absolutne (silnik + reduktor) pomagają zachować punkt zerowy po wyłączeniu zasilania dla powtarzalnego pozycjonowania.
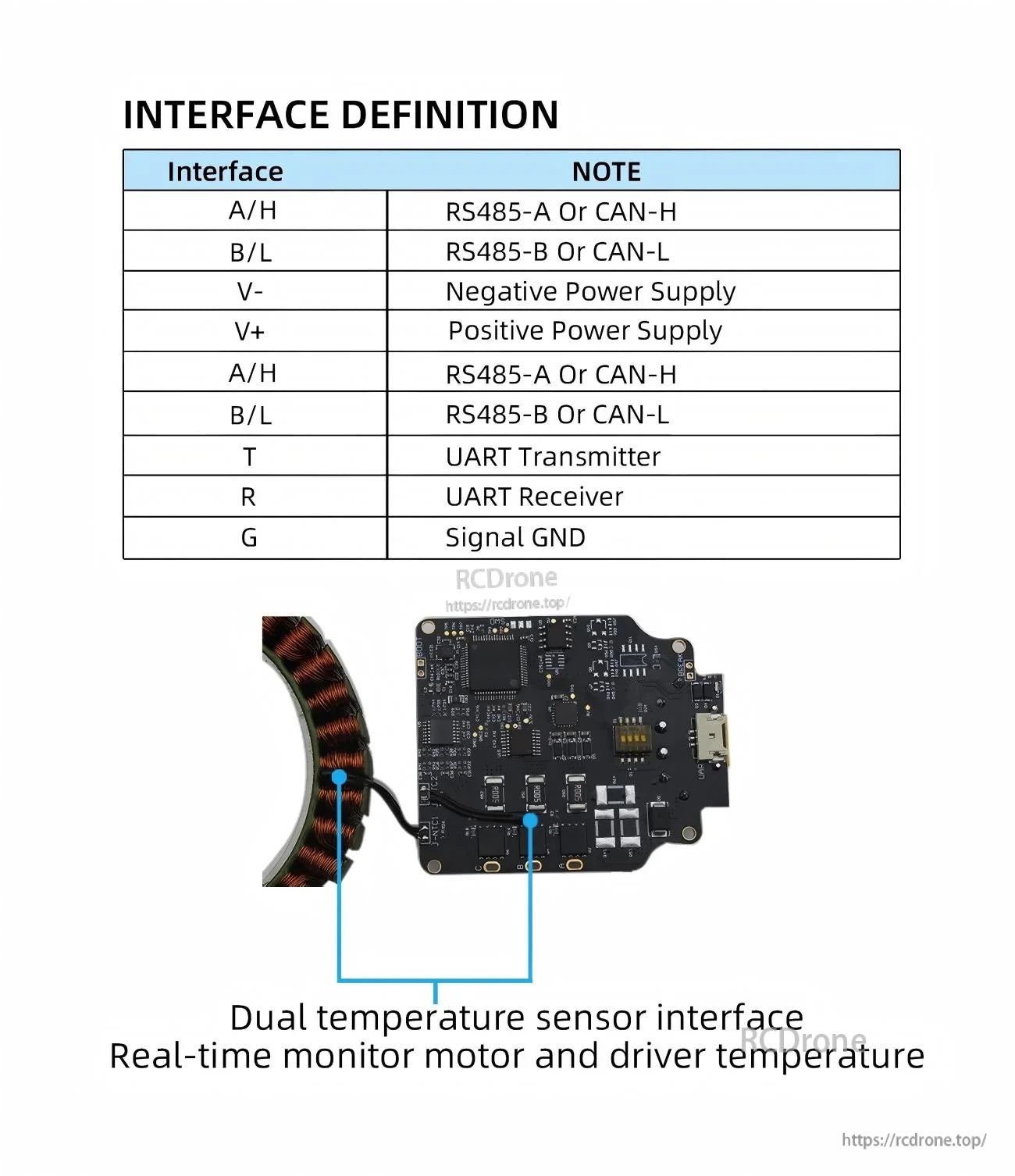
Definicje pinów ułatwiają podłączenie zasilania i wybór komunikacji RS485/CAN podczas integracji.

Reduktor planetarny 1:10 jest zoptymalizowany do kompaktowego wyjścia momentu obrotowego w ciasnych siłownikach.
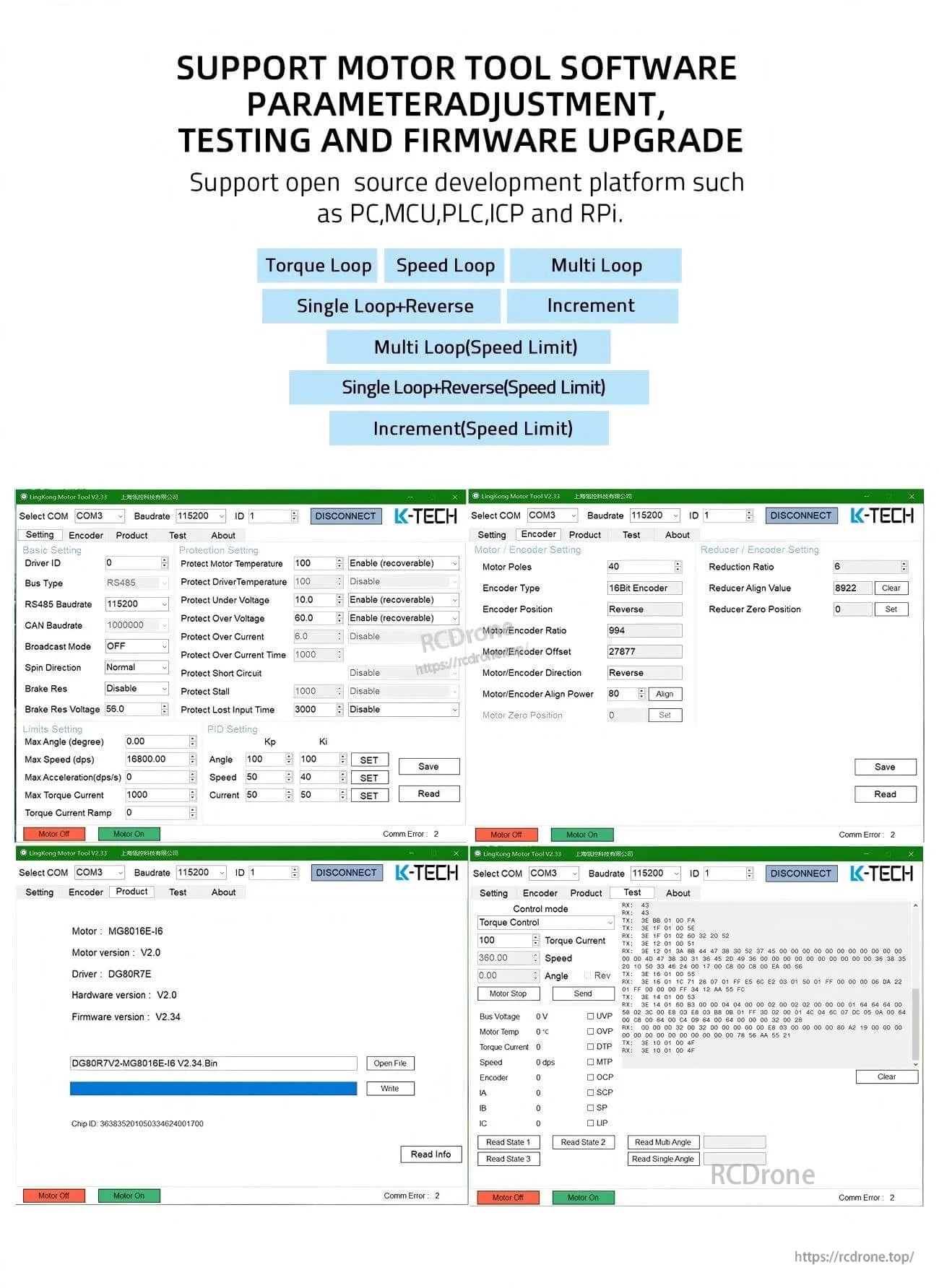
Oprogramowanie narzędziowe PC wspiera dostrajanie parametrów, testy funkcjonalne i aktualizacje oprogramowania podczas uruchamiania.
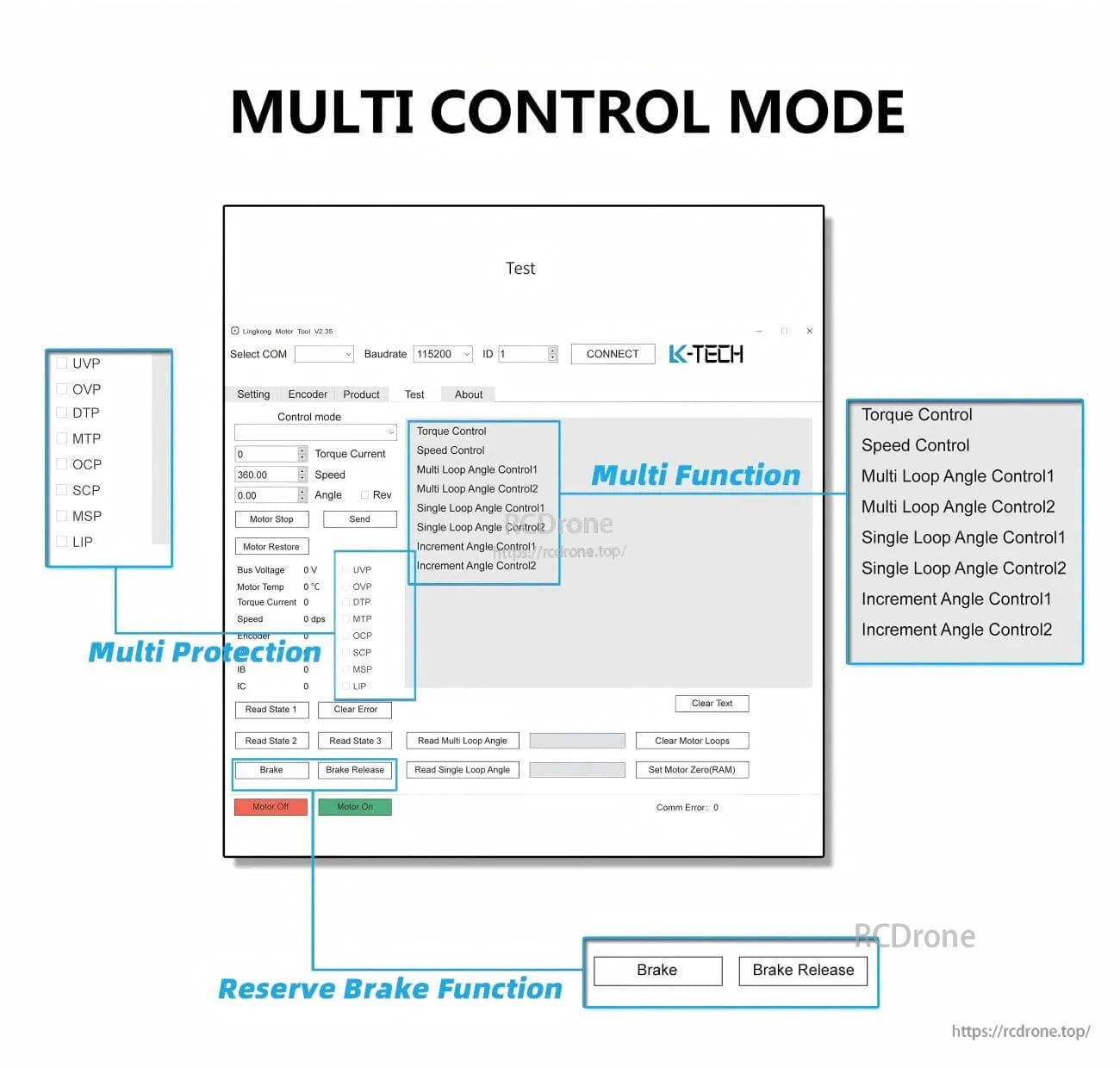
Wielokrotne tryby sterowania i opcje ochrony wspierają przepływy pracy momentu obrotowego, prędkości i pozycji.
Odpowiednie dla AGV, ramion robotycznych, czworonogów i stawów robotów noszonych, gdzie wymagane są precyzyjne przełożenia i sprzężenie zwrotne.
Related Collections




