




LKMTECH MG4010E-i10B-V3 Silnik planetarny z hamulcem, 24V 320RPM, RS485/CAN, enkoder 18bit
LKMTECH MG4010E-i10B-V3 Silnik planetarny z hamulcem, 24V 320RPM, RS485/CAN, enkoder 18bit
LKMTECH
Nie można załadować gotowości do odbioru
Przegląd
LKMTECH MG4010E-i10B-V3 silnik to silnik planetarny z hamulcem, zaprojektowany do robotyki i automatyzacji siłowników, które wymagają kompaktowych rozmiarów, momentu obrotowego z przekładnią oraz komunikacji fieldbus (RS485 lub CAN). Używa enkodera magnetycznego 18-bitowego i wspiera pętle kontroli momentu, prędkości i pozycji.
Kluczowe cechy
- Silnik planetarny z hamulcami w dwóch etapach (seria MG4010E-i10B)
- Przełożenie: 1:10; Luz przekładni: 8 arcmin (również określany jako ≤8 arcmin)
- 18-bitowy enkoder magnetyczny o pojedynczym obrocie (18-bitowy enkoder magnetyczny)
- Komunikacja: RS485 lub CAN
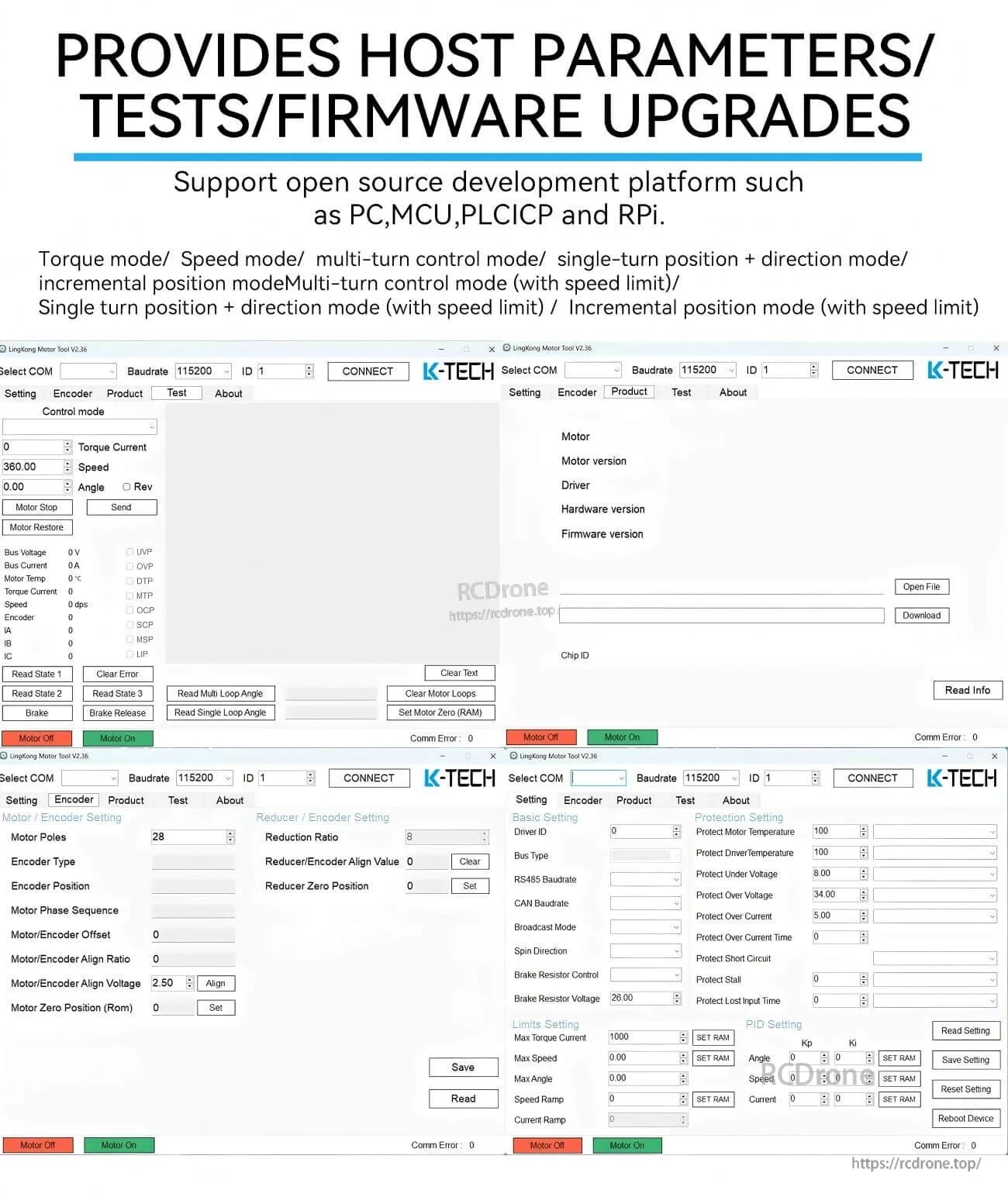
- Tryby/pętle sterowania: Pętla momentu (32KHz) / Pętla prędkości (8KHz) / Pętla pozycji (4KHz)
- Krzywa przyspieszenia: Przyspieszenie trapezowe
- Wbudowany hamulec; Typ hamulca BG4906; Moment hamulca 3.2 N.m
- Funkcje interfejsu: Przełącznik ID
- Tekst związany z napędem: Wbudowane hamulce; komunikacja RS485 lub CAN bus; Podwójne enkodery, zapamiętywanie punktu zerowego po wyłączeniu zasilania; Napięcie wejściowe 12-60V
Specyfikacje
| Nazwa przedmiotu | MG4010E-i10B-V3 |
| Napięcie znamionowe | 24V |
| Maksymalna prędkość | 320RPM |
| Prędkość znamionowa | 260RPM |
| Moment znamionowy | 2.5N.m |
| Maksymalny moment | 4.5N.m |
| Prąd znamionowy | 3.5A |
| Maksymalna moc | 140W |
| Stała prędkości | 108.3rpm/V |
| Stała momentu | 0.07N.m/A |
| Obroty | 14 |
| Typ nawijania | Y |
| Opór fazowy | 0.604Ω |
| Indukcyjność fazowa | 0.28mH |
| Poli silnika | 28 |
| Bezładność wirnika | 202gcm² |
| Temperatura silnika | TAK |
| Typ reduktora | PG4210 |
| Stosunek redukcji | 1:10 |
| Luzy | ≤8 arcmin |
| Obciążenie nominalne łożyska | 1000N |
| Waga silnika | 392g |
| Typ hamulca | BG4906 |
| Moment hamulca (N.m) | 3.2N.m |
| Napięcie startowe (V) | 24V |
| Napięcie podtrzymania (V) | 7V |
| Moc podtrzymania (W) | 1.4W |
| Zalecany napęd | DG40 |
| Napięcie wejściowe napędu | 7.4-32V |
| Komunikacja | RS485 LUB CAN |
| Częstotliwość komunikacji | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Enkoder | 18-bitowy enkoder magnetyczny |
| Prędkość baud enkodera (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Prędkość baud (CAN) | 100K, 125K, 250K, 500K, 1M |
| Tryb sterowania | Pętla momentu (32KHz)/Pętla prędkości (8KHz)/Pętla pozycji (4KHz) |
| Krzywa przyspieszenia | Przyspieszenie trapezowe |
| Rozmiar silnika | Φ 59*37 |
| Luźność przekładni | 8 arcmin |
Definicja interfejsu
- Przełącznik ID
| Port | Instrukcje |
|---|---|
| A/H | RS485-A lub CAN-H |
| B/L | RS485-B lub CAN-L |
| V- | Ujemne zasilanie |
| V+ | Dodatnie zasilanie |
| A/H | RS485-A lub CAN-H |
| B/L | RS485-B lub CAN-L |
| T | Nadajnik UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
Aplikacje
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety / robot egzoszkieletowy
- Roboty czworonożne / Mecha Pies
- Pojazdy AGV / samochód AGV
- Roboty ARU
- Robot serwisowy
- Ręczny lidar
- Robot do treningu rehabilitacyjnego
- Robot inspekcyjny
Instrukcje
W celu uzyskania wsparcia w zakresie integracji oraz pytań przed sprzedażą, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Szczegóły

Kompaktowy silnik planetarny MG4010E-i10B-V3 z wbudowanym hamulcem, redukcją 1:10 i ≤8 arcmin luzu dla precyzyjnych stawów robotycznych.
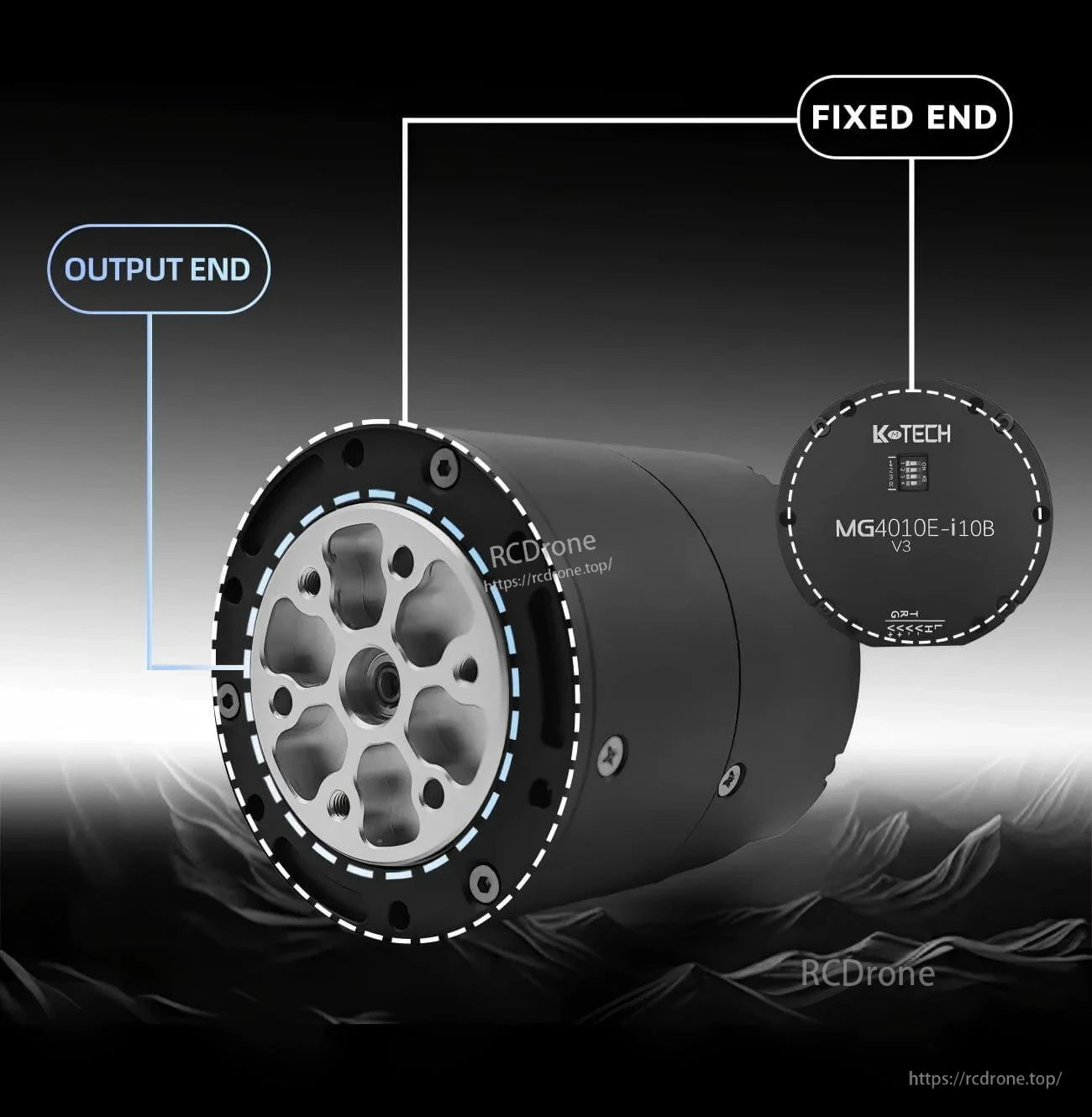
Jasna identyfikacja końca wyjściowego w porównaniu do końca stałego ułatwia uproszczenie układu mechanicznego i orientacji okablowania podczas integracji.

18-bitowy enkoder magnetyczny o pojedynczym obrocie i wsparcie dla RS485/CAN bus umożliwiają kontrolę momentu obrotowego, prędkości i pozycji dla siłowników automatyzacji.
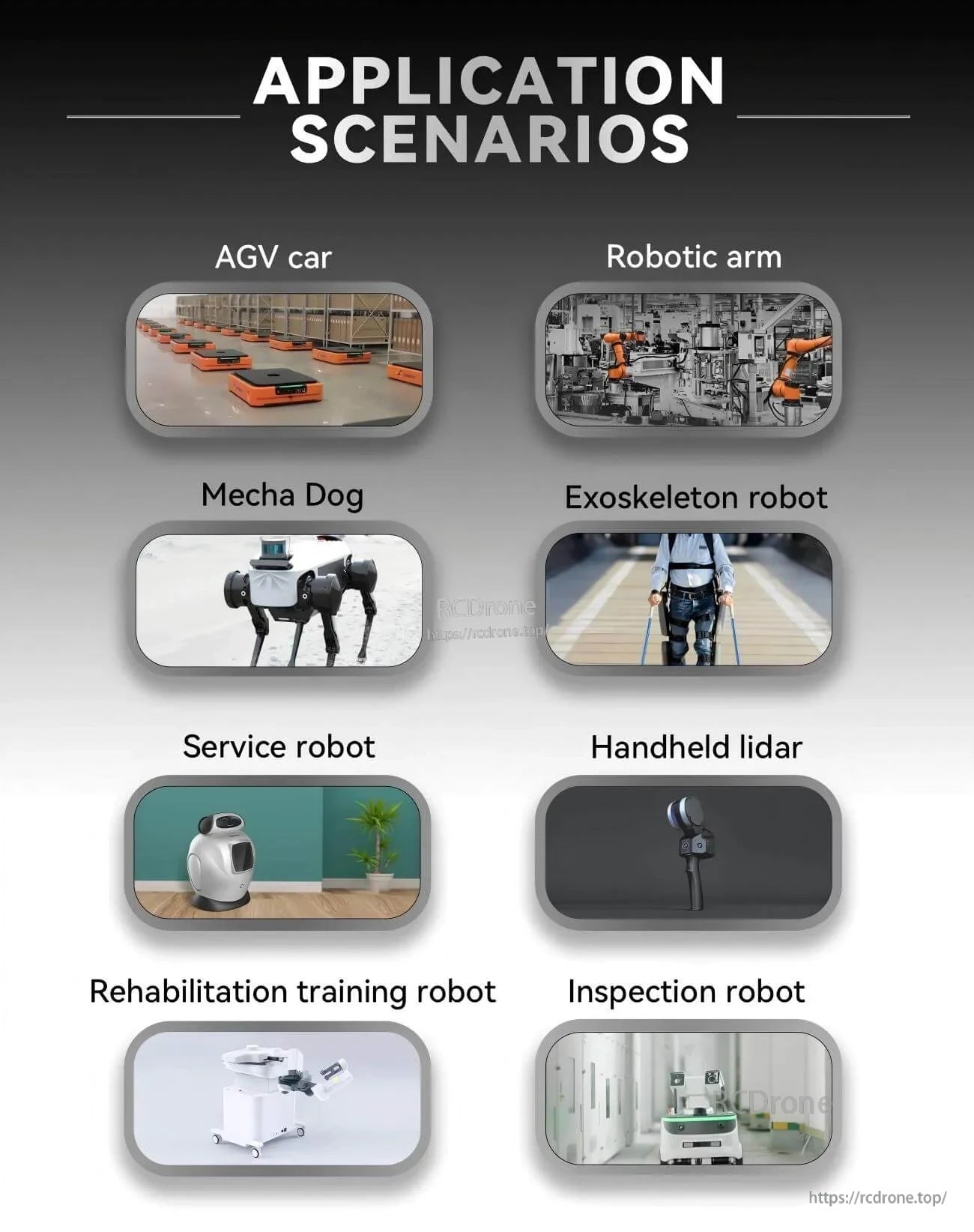
Zapewnia wsparcie dla zastosowań w robotyce i automatyzacji, w tym AGV, ramion robotycznych, robotów czworonożnych, egzoszkieletów i platform inspekcyjnych.
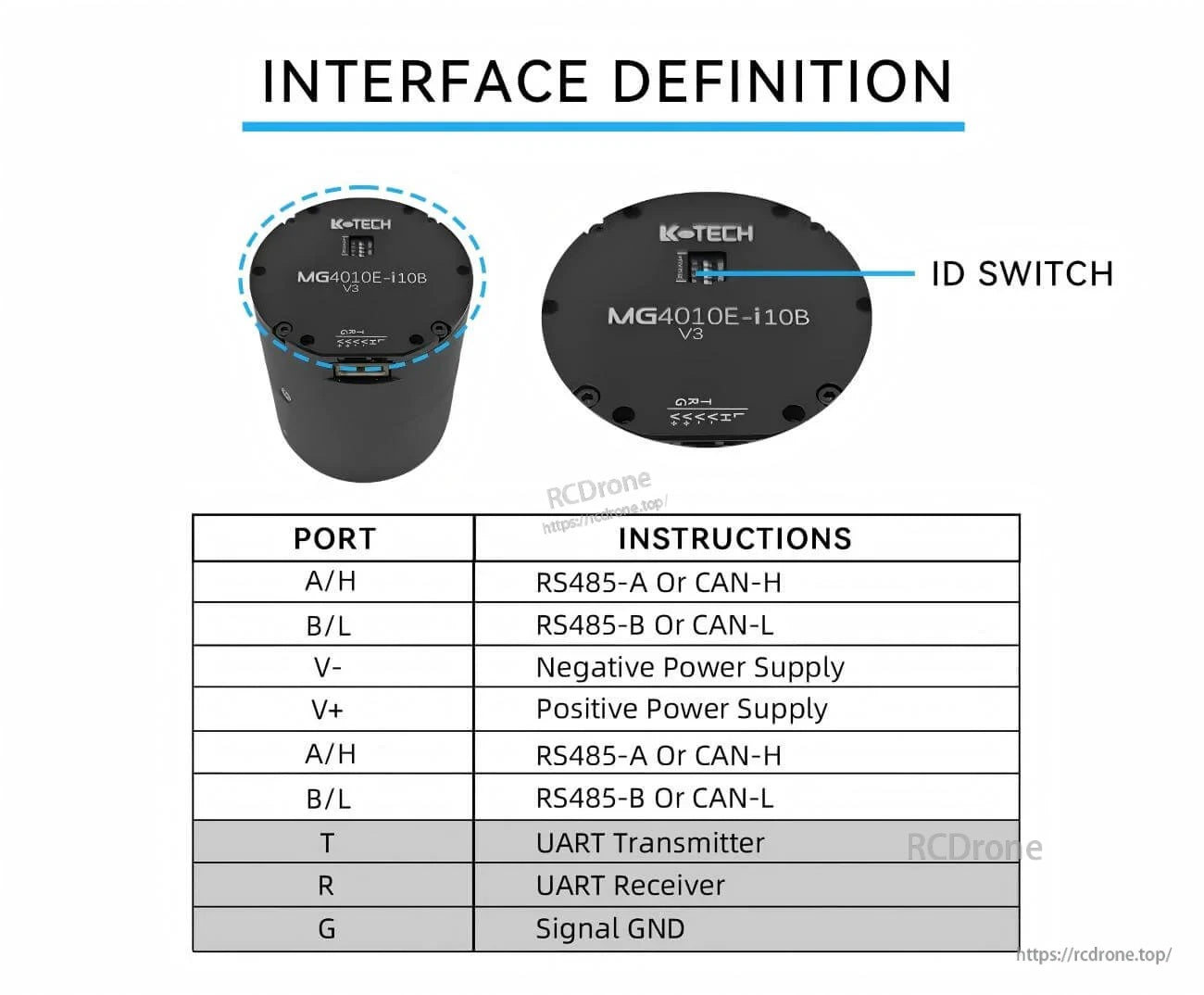
Mapowanie portów obejmuje RS485-A/CAN-H i RS485-B/CAN-L, plus zasilanie, UART TX/RX, uziemienie sygnału oraz przełącznik ID na pokładzie.

Related Collections




