




LKMTECH MG4010E-i36-V3 Silnik z przekładnią planetarną 24V 1:36 RS485/CAN Magnetyczny enkoder do robotyki
LKMTECH MG4010E-i36-V3 Silnik z przekładnią planetarną 24V 1:36 RS485/CAN Magnetyczny enkoder do robotyki
LKMTECH
Nie można załadować gotowości do odbioru
Przegląd
Silnik LKMTECH MG4010E-i36-V3 to silnik planetarny zaprojektowany do robotyki i siłowników sterujących ruchem. Łączy w sobie silnik bezszczotkowy, reduktor planetarny oraz enkoder magnetyczny, z opcjami komunikacji wymienionymi jako RS485 lub CAN.
Kluczowe cechy
- Silnik planetarny (MG4010E-i36, V3).
- Przełożenie: 1:36 (również przedstawione jako „Przełożenie 1:36”).
- Luzy zębate: 7 arcmin (etykieta na obrazie) / 12 arcmin (tabela specyfikacji).
- Enkoder: 18-bitowy enkoder magnetyczny absolutny jednego obrotu (tekst na obrazie); również wymieniony jako 18-bitowy (silnik) + 14-bitowy (reduktor) enkoder magnetyczny (tabela specyfikacji).
- Komunikacja: RS485 lub CAN.
- Wskazany napęd/sterownik FOC (tekst na obrazie: „Wysokowydajny sterownik FOC”).
- Wbudowana hamulec (tekst na obrazie/etykieta UI).
- Obsługiwane parametry hosta/testy/aktualizacje oprogramowania układowego (tekst na obrazie).
Specyfikacje
| Nazwa przedmiotu | MG4010E-i36-V3 |
| Napięcie znamionowe | 24V |
| Maksymalna prędkość | 90RPM |
| Prędkość znamionowa | 77RPM |
| Prąd znamionowy | 2.4A |
| Maksymalna moc | 132W |
| Moment obrotowy znamionowy | 6 N.m (tabela specyfikacji) / 9 N.m (etykieta obrazu) |
| Maksymalny moment obrotowy | 13 N.m (tabela specyfikacji) / 18 N.m (etykieta obrazu) |
| Stała prędkości | 3 rpm/V |
| Stała momentu obrotowego | 2.58 N.m/A |
| Obroty | 14 |
| Typ uzwojenia | Y |
| Opór fazowy | 0.68 Ω |
| Indukcyjność fazowa | 0.25 mH |
| Polary silnika | 28 |
| Inercja wirnika | 158 gcm² |
| Temperatura silnika | TAK |
| Typ reduktora | PG5336 |
| Stosunek redukcji | 1:36 |
| Luzy | ≤12 arcmin (tabela specyfikacji) / 6 arcmin (etykieta na obrazku) |
| Obciążenie nominalne łożyska | 1120 N |
| Waga silnika | 378 g |
| Zalecany napęd | DG40E |
| Napięcie wejściowe napędu | 12-24V (tabela specyfikacji) / 12-60V (etykieta na obrazku) |
| Komunikacja | RS485 LUB CAN |
| Częstotliwość komunikacji | RS485: 500 Hz (115200 bps) / CAN: 2 KHz (1 Mbps) |
| Enkoder | 18bit (silnik) + 14bit (reduktor) Encoder magnetyczny |
| Prędkość baud encodera (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2 Mbps |
| Prędkość baud (CAN) | 100K, 125K, 250K, 500K, 1M |
| Tryb sterowania | Obwód momentu (24 KHz) / Obwód prędkości (8 KHz) / Obwód pozycji (4 KHz) |
| Krzywa przyspieszenia | Przyspieszenie trapezowe |
| Rozmiar silnika | Φ 53*54.5 (etykieta obrazu) |
Definicja interfejsu
- Przełącznik ID (etykieta obrazu: “PRZEŁĄCZNIK ID”).
| Port | Instrukcje |
|---|---|
| A/H | RS485-A lub CAN-H |
| B/L | RS485-B lub CAN-L |
| V- | Ujemne zasilanie |
| V+ | dodatnie zasilanie |
| T | Transmiter UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
Scenariusze aplikacji
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV / samochód AGV
- Roboty ARU
- Mecha Pies
- Robot serwisowy
- Ręczny lidar
- Robot do rehabilitacji
- Robot inspekcyjny
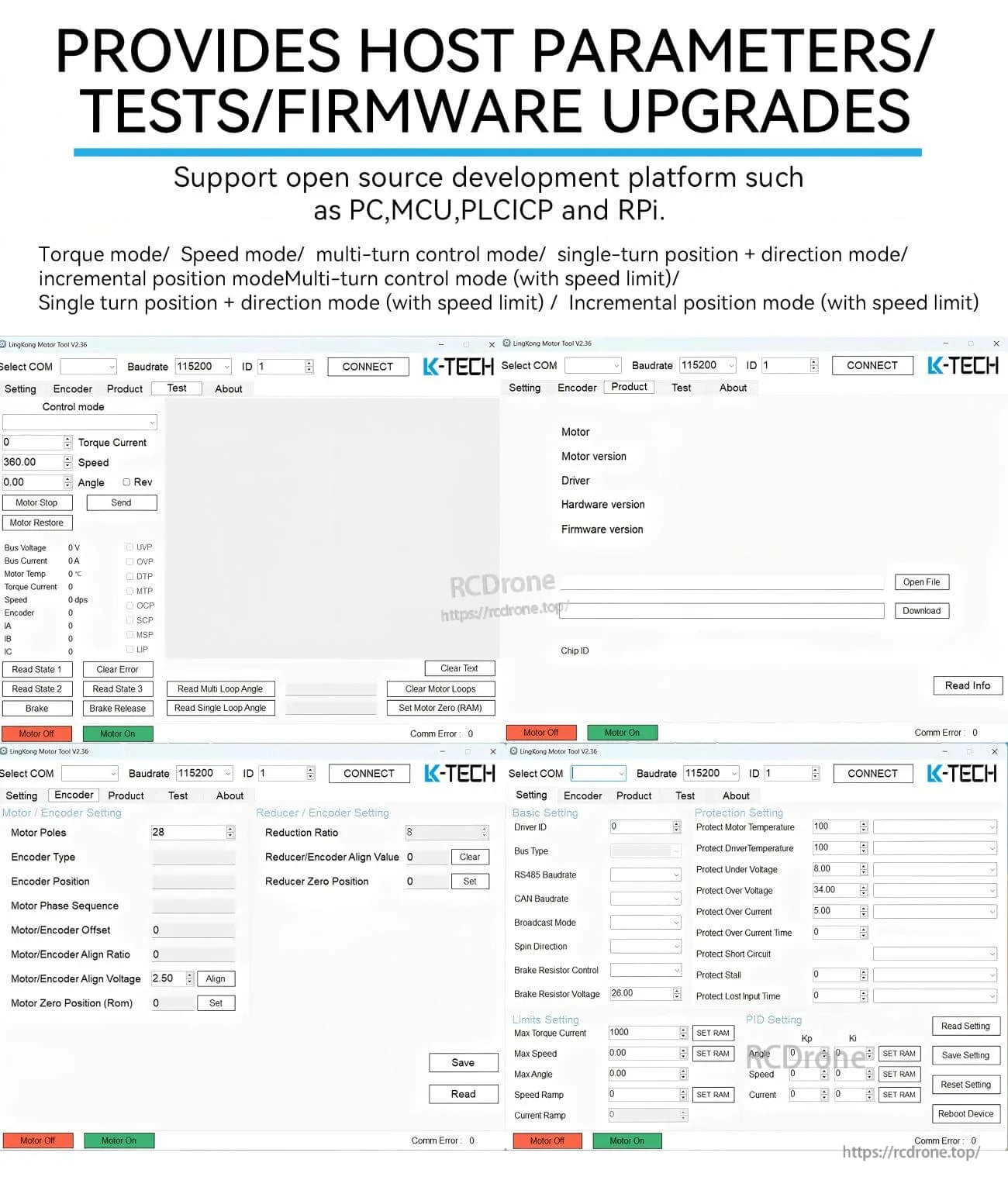
Kontrola & Notatki o oprogramowaniu
- Obsługuje otwarte platformy rozwoju, takie jak PC, MCU, PLC, ICP i RPi.
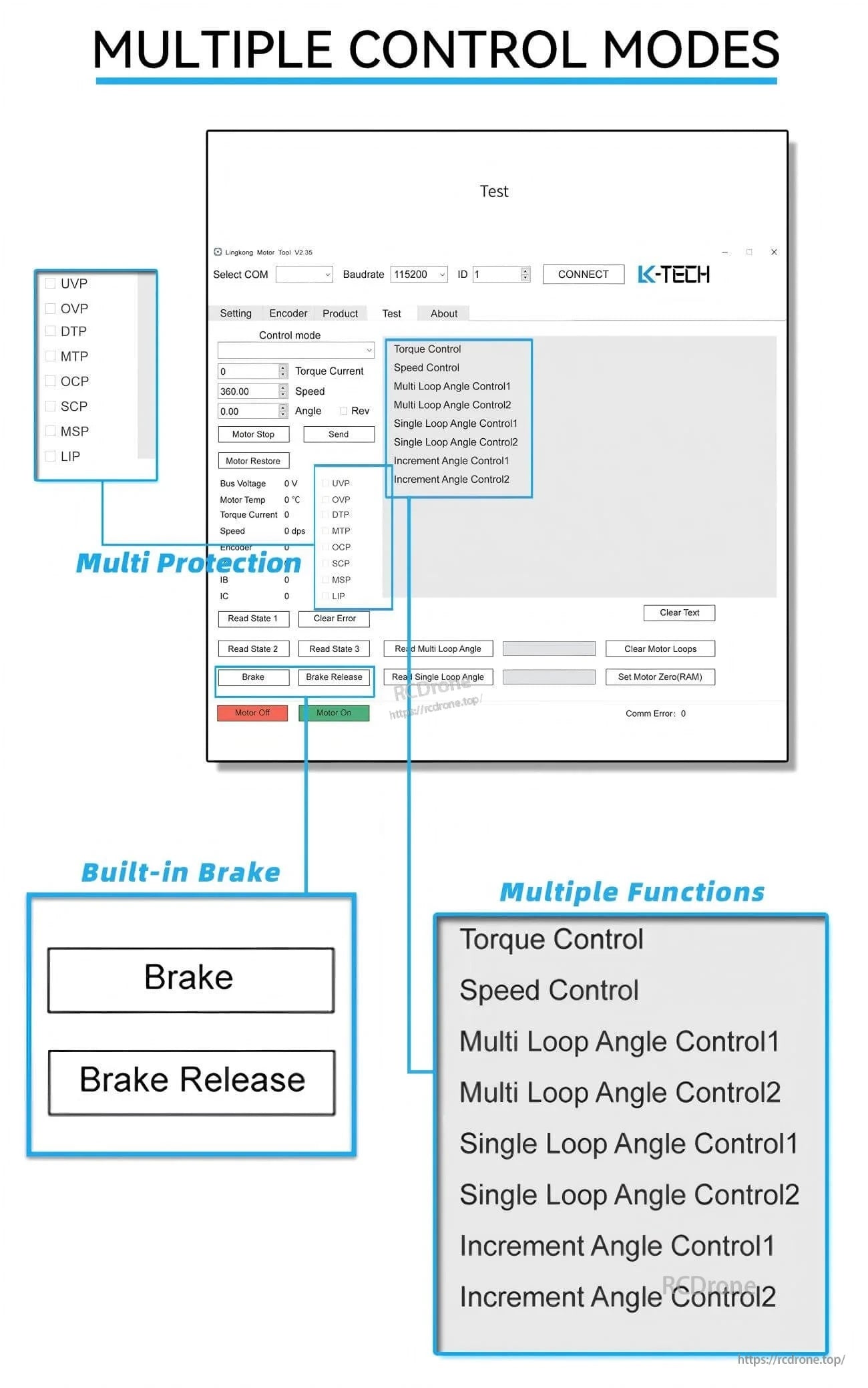
- Wymienione tryby (tekst na obrazku): tryb momentu, tryb prędkości, tryb kontroli wielokrotnego obrotu, tryb pozycji + kierunku jednego obrotu, tryb pozycji inkrementalnej; pokazane są również wersje z ograniczeniem prędkości.
- Wielokrotne tryby kontroli pokazane w interfejsie użytkownika: Kontrola momentu, Kontrola prędkości, Kontrola kąta wielokrotnego obrotu1, Kontrola kąta wielokrotnego obrotu2, Kontrola kąta jednego obrotu1, Kontrola kąta jednego obrotu2, Kontrola kąta inkrementalnego1, Kontrola kąta inkrementalnego2.
- Wielokrotne etykiety ochrony pokazane: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP.
- Wbudowane kontrolki hamulca pokazane: Hamulec, Zwolnienie hamulca.
W celu sprawdzenia kompatybilności przed sprzedażą (integracja RS485/CAN, wybór prędkości transmisji) lub pomocy w dostępie do plików, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Podręczniki / Dokumenty
Szczegóły

MG4010E-i36-V3 łączy silnik bezszczotkowy, reduktor planetarny i enkoder magnetyczny dla kompaktowych aktuatorów robotycznych.
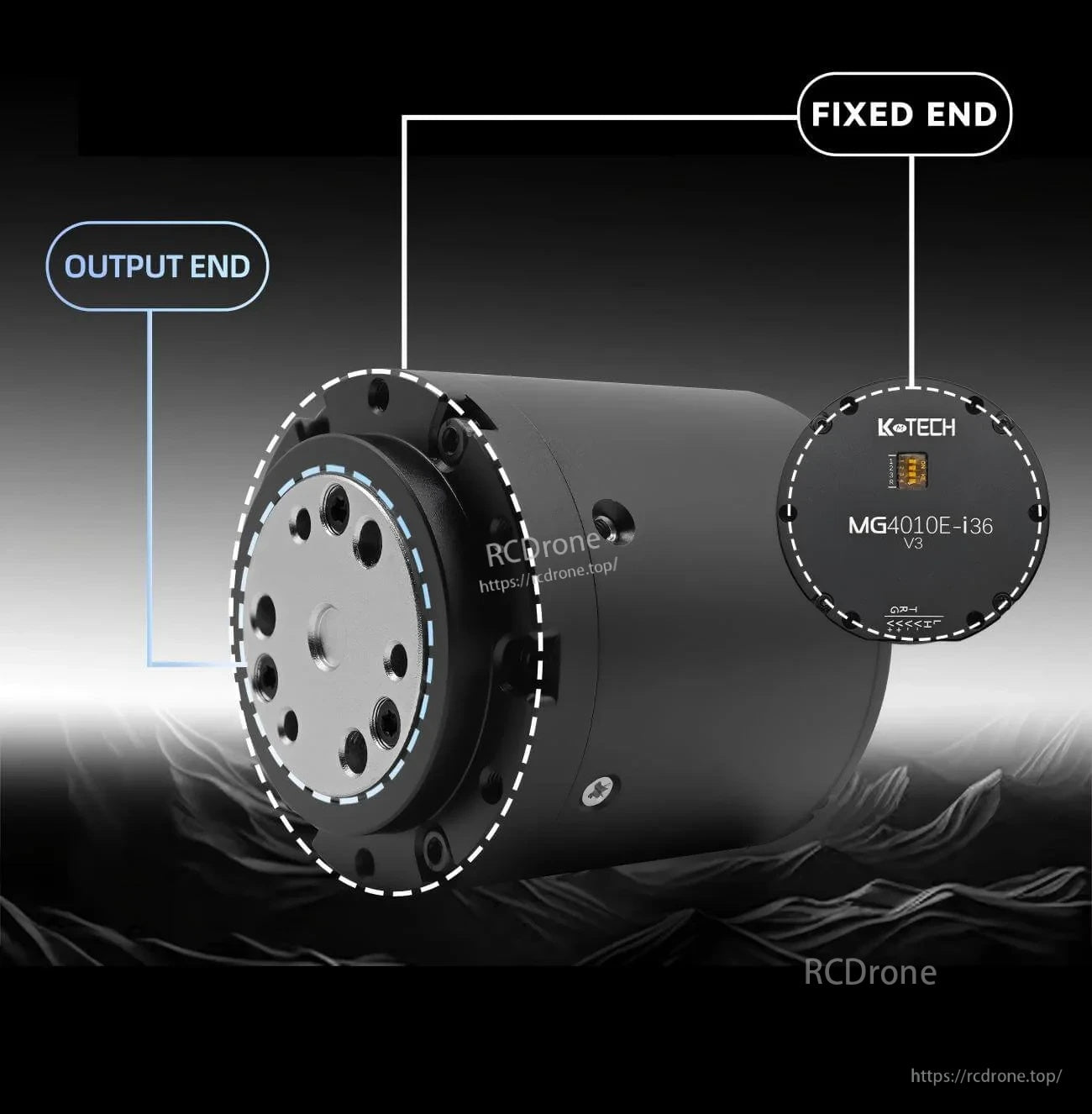
Końcówka wyjściowa w stylu flanszy i stały układ końcowy ułatwiają integrację w ramionach, nogach i innych modułach stawowych.

Komunikacja RS485 lub CAN współpracuje z napędem FOC i sprzężeniem zwrotnym z absolutnym enkoderem magnetycznym dla stabilnej kontroli momentu obrotowego, prędkości i pozycji.
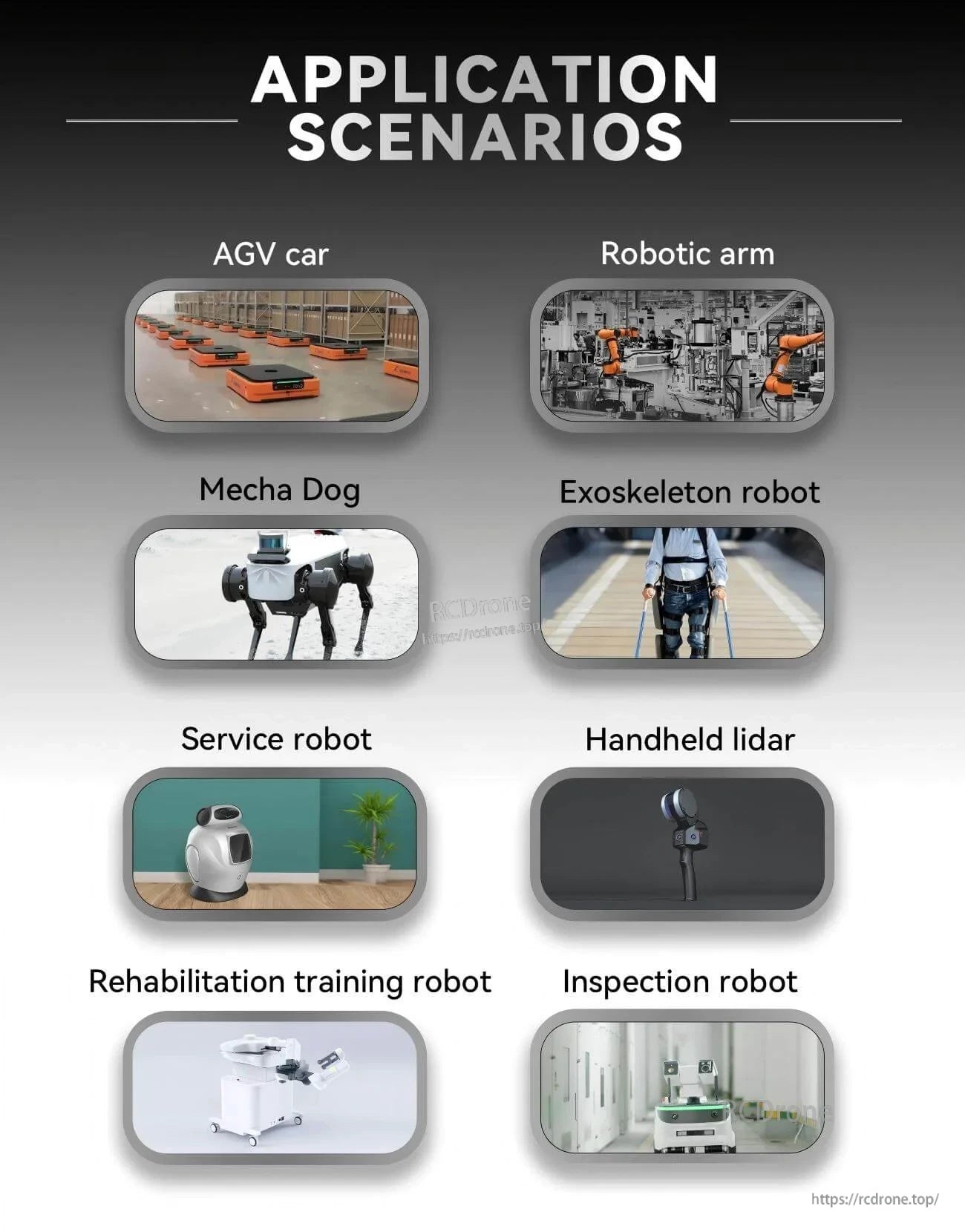
Typowe zastosowania obejmują AGV, ramiona robotyczne, platformy czworonogów, egzoszkielety oraz roboty inspekcyjne lub serwisowe.
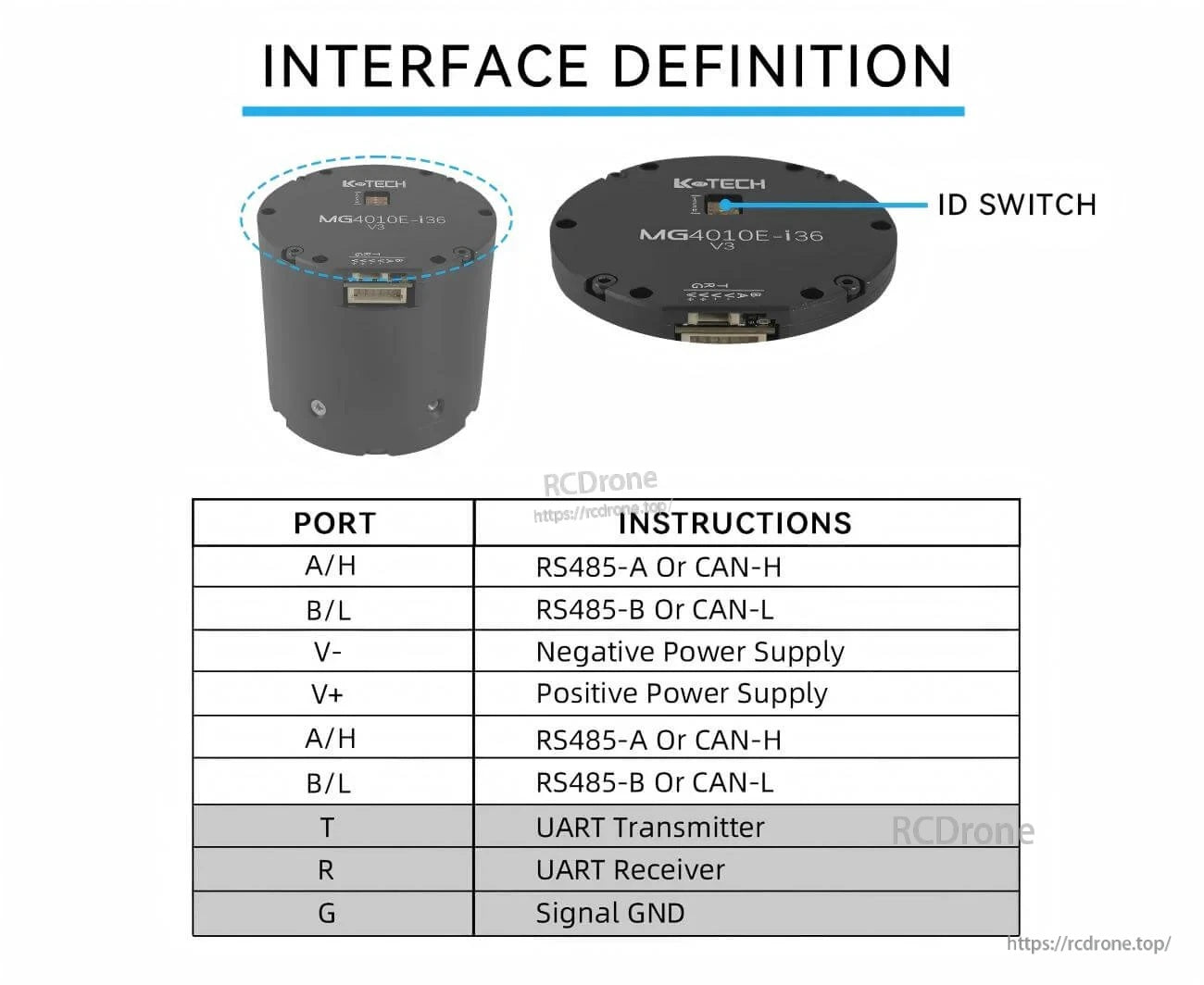
Okablowanie jest uproszczone dzięki oznaczonym pinom magistrali RS485/CAN, połączeniom zasilania, UART Tx/Rx, uziemieniu sygnału oraz wbudowanemu przełącznikowi ID.
Wbudowana kontrola hamulca i wiele trybów pracy pomagają dostosować zachowanie do różnych zadań związanych z kontrolą ruchu i wymagań bezpieczeństwa.
Related Collections




