




LKMTECH MG4010E-i36B-V3 Silnik 24V 1:36 Silnik planetarny z hamulcem, RS485/CAN, enkoder magnetyczny
LKMTECH MG4010E-i36B-V3 Silnik 24V 1:36 Silnik planetarny z hamulcem, RS485/CAN, enkoder magnetyczny
LKMTECH
Nie można załadować gotowości do odbioru
Przegląd
Silnik LKMTECH MG4010E-i36B-V3 to silnik z przekładnią planetarną z wbudowanym hamulcem i sprzężeniem zwrotnym enkodera, zaprojektowany do działania w robotyce, gdzie wymagane jest precyzyjne sterowanie momentem/obrotami/pozycją oraz kompaktowa integracja. Obsługuje komunikację RS485 lub CAN i jest specyfikowany z reduktorem PG4210 (1:36) oraz podwójnym enkoderem magnetycznym (18-bitowy silnik + 14-bitowy reduktor).
Kluczowe cechy
- Reduktor planetarny: PG4210, stosunek redukcji 1:36, luz ≤12 arcmin
- Enkoder: 18-bitowy (silnik) + 14-bitowy (reduktor) enkoder magnetyczny
- Komunikacja: RS485 lub CAN
- Pętle sterujące: Pętla momentu (32KHz) / Pętla prędkości (8KHz) / Pętla pozycji (4KHz)
- Krzywa przyspieszenia: Przyspieszenie trapezowe
- Hamulce: BG4906, moment hamulca 0.6N.m
- Temperatura silnika: TAK
Specyfikacje techniczne
| Nazwa przedmiotu | MG4010E-i36B-V3 |
| Napięcie znamionowe | 24V |
| Maksymalna prędkość | 90RPM |
| Prędkość znamionowa | 77RPM |
| Moment obrotowy znamionowy | 6N.m |
| Maksymalny moment obrotowy | 13N.m |
| Prąd znamionowy | 2.4A |
| Maksymalna moc | 132W |
| Stała prędkości | 3rpm/V |
| Stała momentu obrotowego | 2.58N.m/A |
| Obroty | 14 |
| Typ uzwojenia | Y |
| Opór fazowy | 0.68Ω |
| Indukcyjność fazowa | 0.25mH |
| Polary silnika | 28 |
| Inercja wirnika | 158gcm² |
| Temperatura silnika | TAK |
| Typ reduktora | PG4210 |
| Przełożenie | 1:36 |
| Luzy | ≤12 arcmin |
| Obciążenie nominalne łożyska | 1120N |
| Waga silnika | 542.5g |
| Typ hamulca | BG4906 |
| Moment hamulca (N.m) | 0.6N.m |
| Napięcie rozruchowe (V) | 24V |
| Napięcie podtrzymania (V) | 7V |
| Moc podtrzymania (W) | 1.4W |
| Rekomendowany napęd | DG40E |
| Napięcie wejściowe napędu | 7.4-32V |
| Komunikacja | RS485 LUB CAN |
| Częstotliwość komunikacji | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Enkoder | Enkoder magnetyczny 18bit(motor)+14bit(reduktor) |
| Prędkość baud enkodera (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Prędkość baud (CAN) | 100K, 125K, 250K, 500K, 1M |
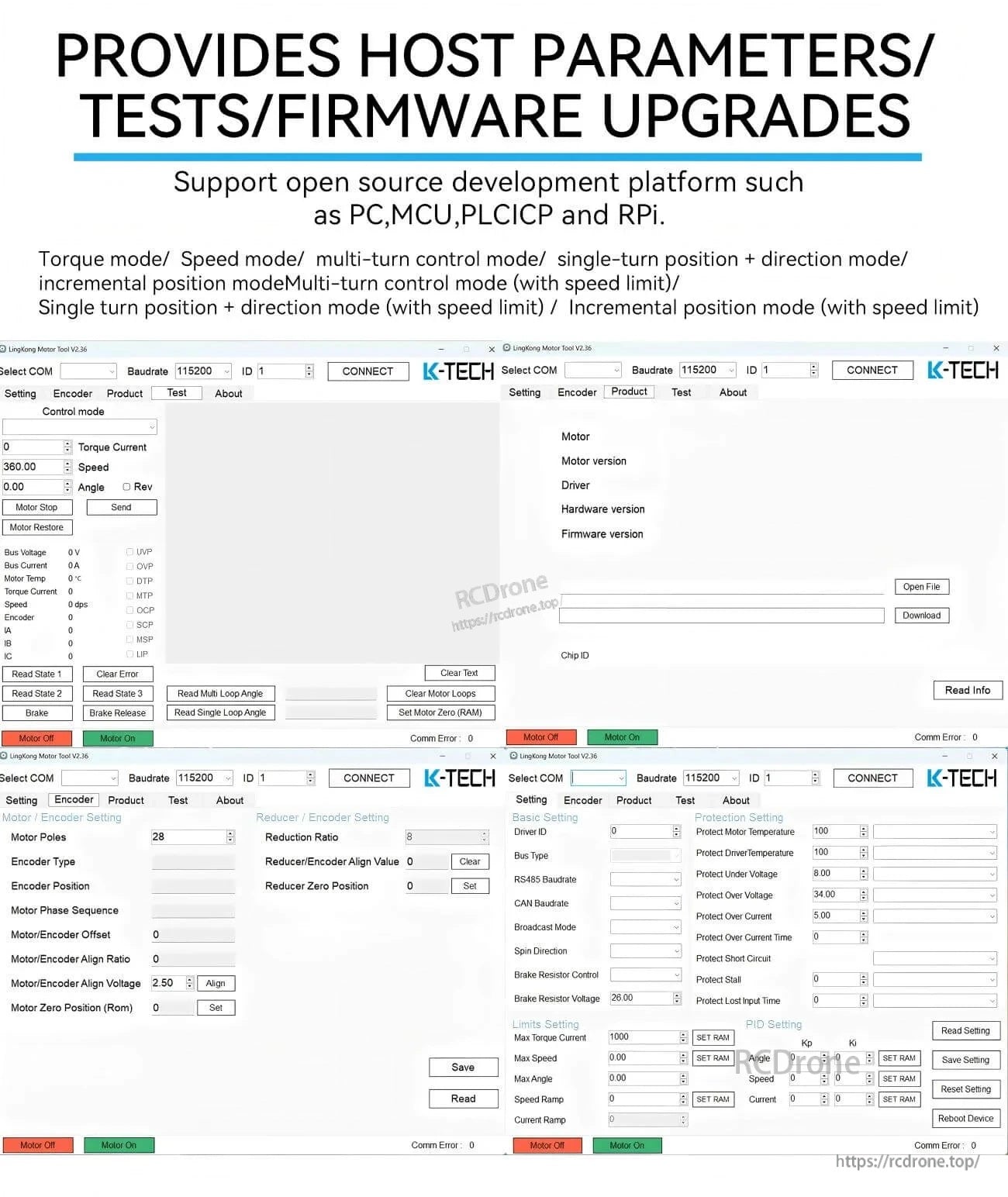
| Tryb sterowania | Pętla momentu (32KHz)/Pętla prędkości (8KHz)/Pętla pozycji (4KHz) |
| Krzywa przyspieszenia | Przyspieszenie trapezowe |
Definicja interfejsu (Porty)
Znaczenie portów pokazane dla tej serii silników:
- A/H: RS485-A lub CAN-H
- B/L: RS485-B lub CAN-L
- V-: Ujemne zasilanie
- V+: Dodatnie zasilanie
- T: Nadajnik UART
- R: Odbiornik UART
- G: GND sygnałowy
- Przełącznik ID
Aplikacje
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonogie
- Pojazdy AGV
- Roboty ARU
Podręczniki / Dokumenty
W celu uzyskania wsparcia w integracji i sprawdzenia zgodności przed sprzedażą, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Szczegóły

Kompaktowa obudowa silnika planetarnego integruje hamulec i interfejs pokładowy w jednym aktuatorze.
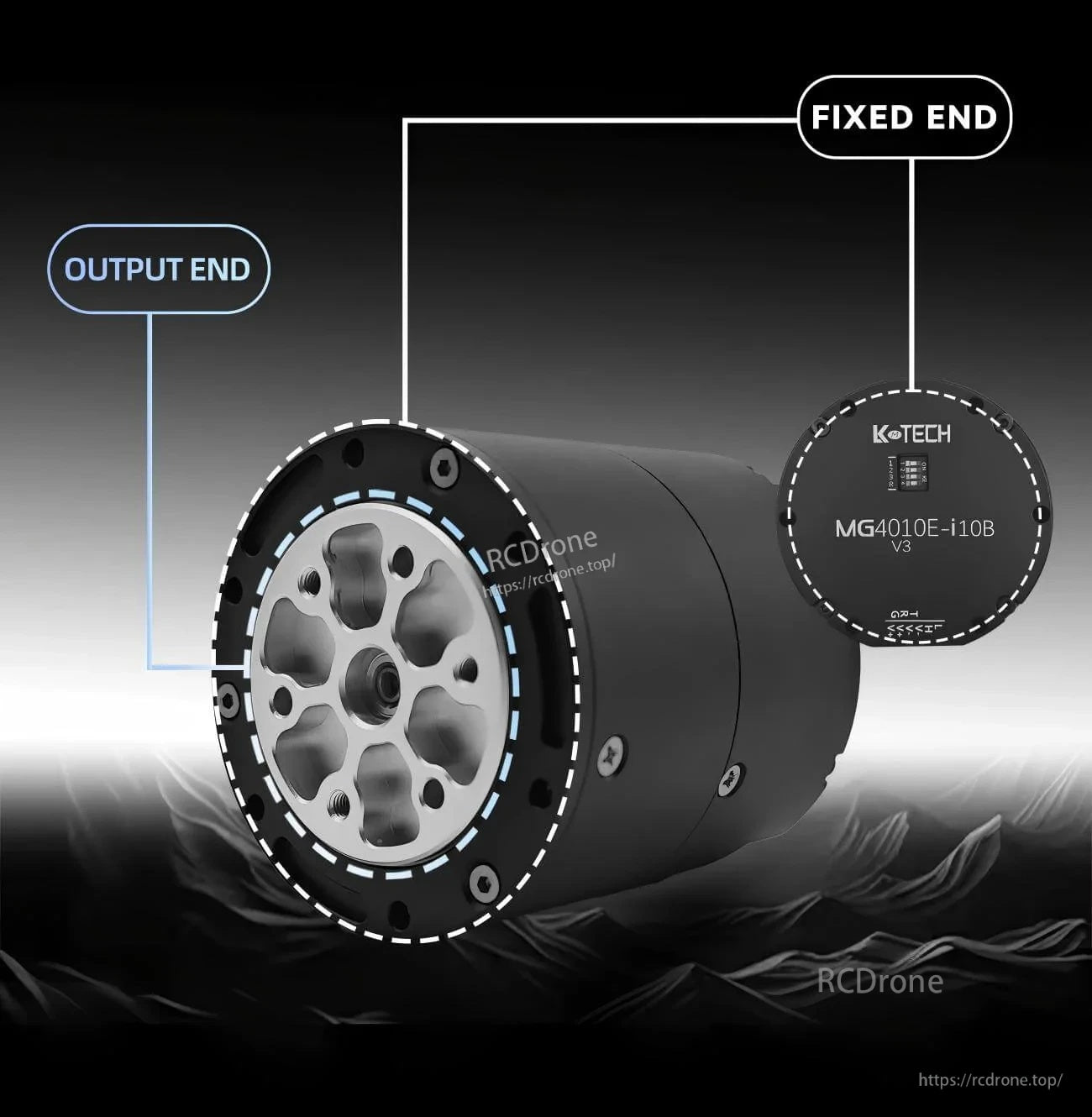
Wyraźnie zdefiniowany koniec wyjściowy i koniec stały ułatwiają integrację mechaniczną i wyrównanie w zespołach.

Sprzężenie zwrotne enkodera i komunikacja szeregowa wspierają stabilny moment obrotowy, prędkość i kontrolę pozycji dla stawów robotycznych.
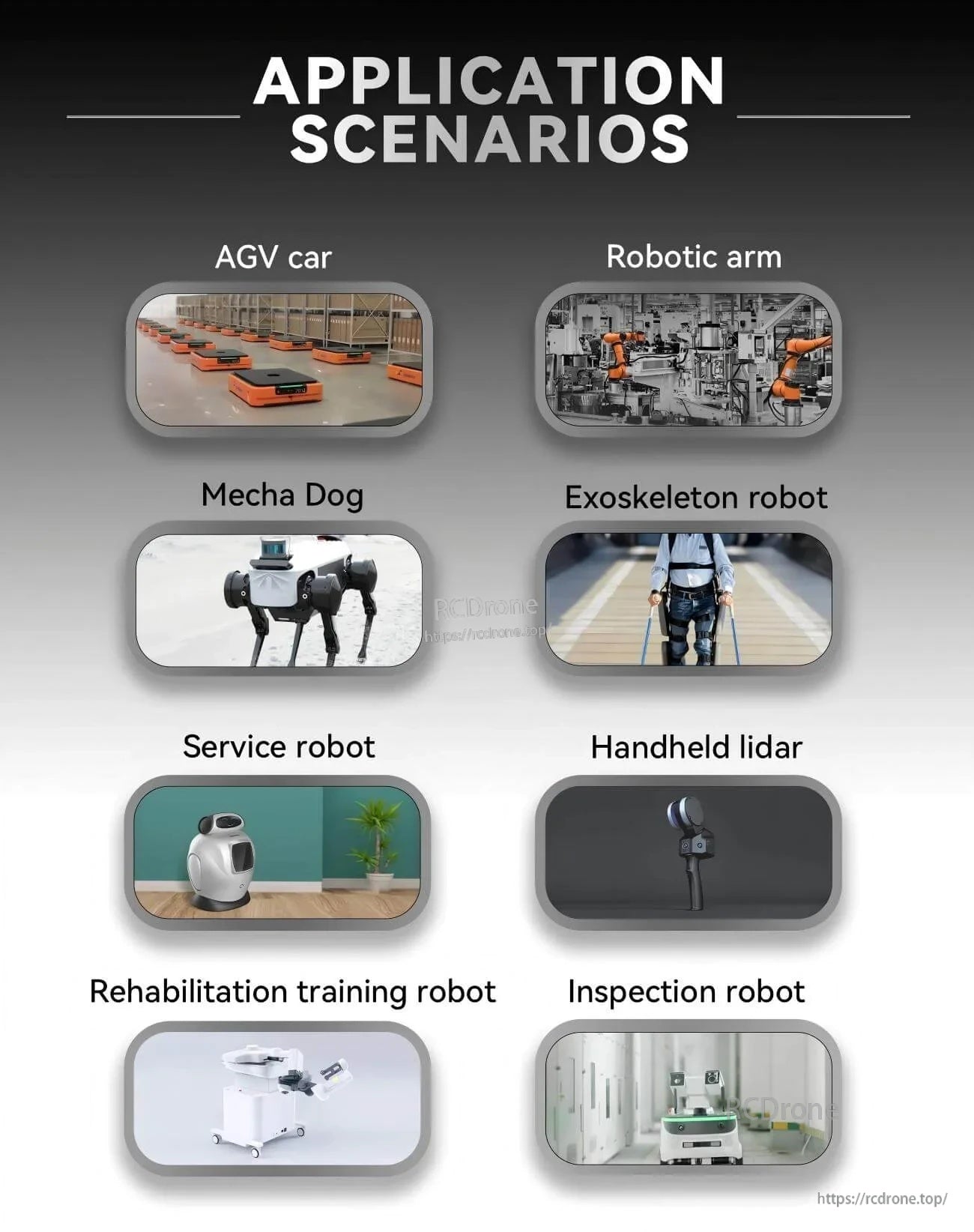
Zapewnia wsparcie dla zadań aktowania robotów, od AGV i ramion robotycznych po roboty kroczące i systemy egzoszkieletowe.
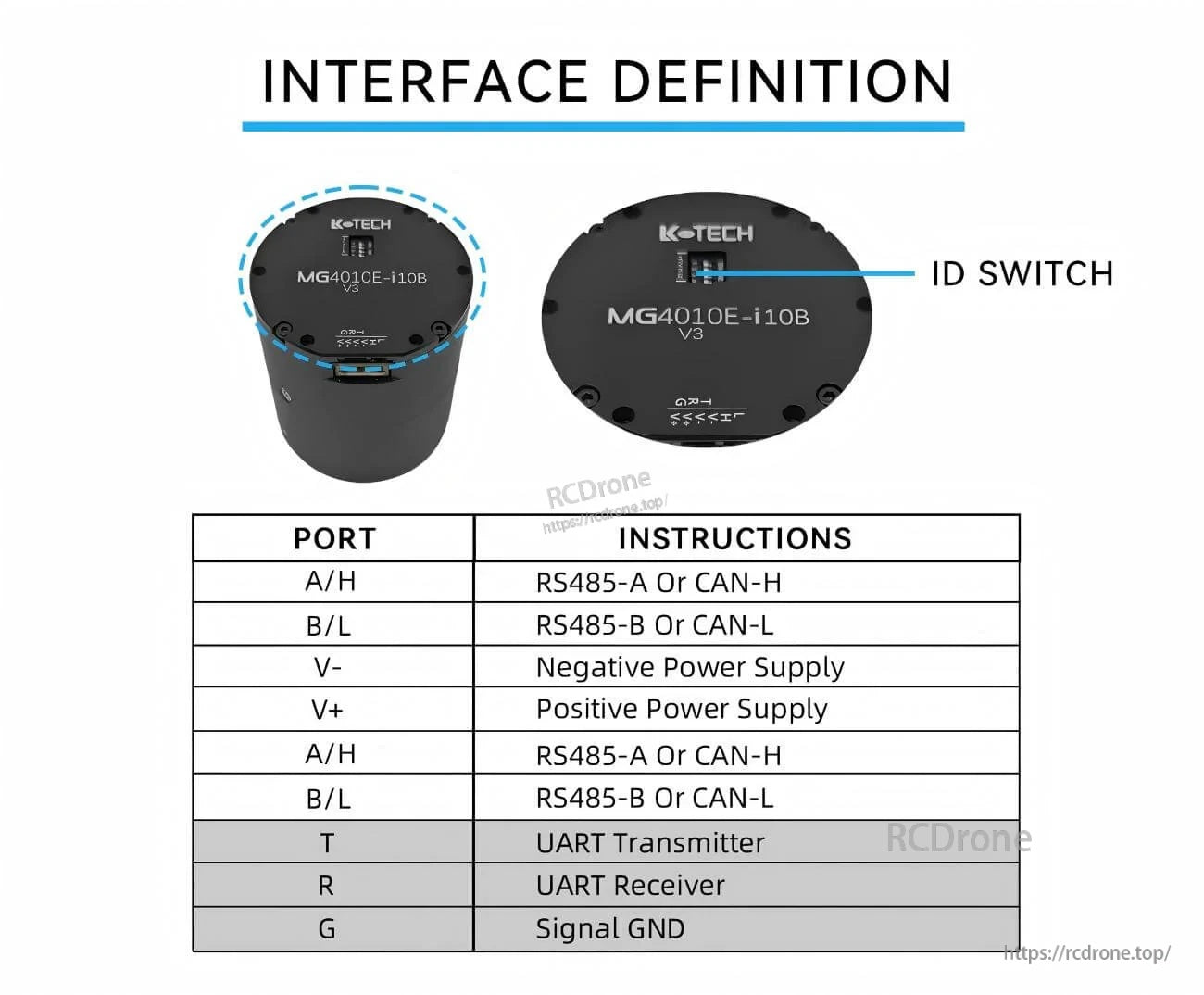
Definicje portów obejmują zasilanie, okablowanie RS485/CAN oraz piny UART, z przełącznikiem ID na pokładzie do adresowania.

Related Collections




