




LKMTECH MG5010E-i10-V3 Silnik 24V 160W 1:10 Przekładnia planetarna, RS485/CAN, Enkoder 18-bitowy
LKMTECH MG5010E-i10-V3 Silnik 24V 160W 1:10 Przekładnia planetarna, RS485/CAN, Enkoder 18-bitowy
LKMTECH
Nie można załadować gotowości do odbioru
Przegląd
Silnik LKMTECH MG5010E-i10-V3 to silnik bezszczotkowy z planetarną przekładnią redukcyjną i zintegrowanym enkoderem do zastosowań w robotyce i kontroli ruchu. Jest przystosowany do pracy przy napięciu 24V i obsługuje komunikację RS485 lub CAN, gdy jest używany z zalecanym napędem.
Kluczowe cechy
- Silnik bezszczotkowy o wysokiej mocy + precyzyjna planetarna przekładnia redukcyjna
- Moment obrotowy nominalny 4 N.m; maksymalny moment obrotowy 7 N.m
- Stosunek redukcji 1:10 (typ reduktora: PG5110)
- Enkoder magnetyczny 18-bitowy (strona silnika)
- Opcje komunikacji: RS485 lub CAN (z zalecanym napędem DG40E)
- Temperatura silnika: TAK
- Podwójny interfejs czujnika temperatury do monitorowania w czasie rzeczywistym temperatury silnika i napędu
- Podświetlenie napędu: napięcie wejściowe 7.4-32V; komunikacja RS485 lub CAN bus; podwójne enkodery z pamięcią punktu zerowego po wyłączeniu zasilania
Specyfikacje
| Nazwa przedmiotu | MG5010E-i10-V3 |
| Napięcie znamionowe | 24V |
| Maksymalna prędkość | 320RPM |
| Prędkość znamionowa | 235RPM |
| Moment obrotowy znamionowy | 4 N.m |
| Maksymalny moment obrotowy | 7 N.m |
| Prąd znamionowy | 4.4A |
| Maksymalna moc | 160W |
| Stała prędkości | 97.9 rpm/V |
| Stała momentu | 0.1 N.m/A |
| Obroty | 13 |
| Typ uzwojenia | Y |
| Opór fazowy | 0.466Ω |
| Indukcyjność fazowa | 0.26mH |
| Poli silnika | 28 |
| Inercja wirnika | 850 gcm² |
| Temperatura silnika | TAK |
| Typ reduktora | PG5110 |
| Stosunek redukcji | 1:10 |
| Luźność | 6 arcmin (również podane jako ≤8 arcmin) |
| Obciążenie nominalne łożyska | 1000N |
| Waga silnika | 420g |
| Rozmiar | Φ63*41.5 |
| Rekomendowany napęd | DG40E |
| Napięcie wejściowe napędu | 7.4-32V |
| Komunikacja | RS485 LUB CAN |
| Częstotliwość komunikacji | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Enkoder | 18-bitowy enkoder magnetyczny |
| Prędkość transmisji enkodera (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Prędkość transmisji (CAN) | 1M |
| Tryb sterowania | Pętla momentu (32KHz) / Pętla prędkości (8KHz) / Pętla pozycji (4KHz) |
| Krzywa przyspieszenia | Przyspieszenie trapezowe |
Definicja interfejsu
| Interfejs | Uwaga |
|---|---|
| A/H | RS485-A lub CAN-H |
| B/L | RS485-B lub CAN-L |
| V- | Ujemne zasilanie |
| V+ | Dodatnie zasilanie |
| A/H | RS485-A lub CAN-H |
| B/L | RS485-B lub CAN-L |
| T | Nadajnik UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
Aplikacje
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety / roboty noszone
- Roboty czworonożne / platformy robotów psów
- Pojazdy AGV / samochód AGV
- Roboty ARU
Aby uzyskać wskazówki dotyczące wyboru i wsparcia w integracji, skontaktuj się z https://rcdrone.top/ lub wyślij e-mail na [email protected] .
Instrukcje
Szczegóły

MG5010E-i10-V3 integruje silnik bezszczotkowy i przekładnię planetarną w kompaktowym aktuatorze do robotyki i kontroli ruchu.

Reduktor planetarny 1:10 pomaga dostarczyć wyższy moment obrotowy i stabilność pozycjonowania dla konstrukcji z przegubami i napędem kół.


18-bitowy enkoder magnetyczny po stronie silnika wspiera precyzyjne sprzężenie zwrotne; niektóre konfiguracje wykorzystują również dodatkowy enkoder po stronie reduktora.
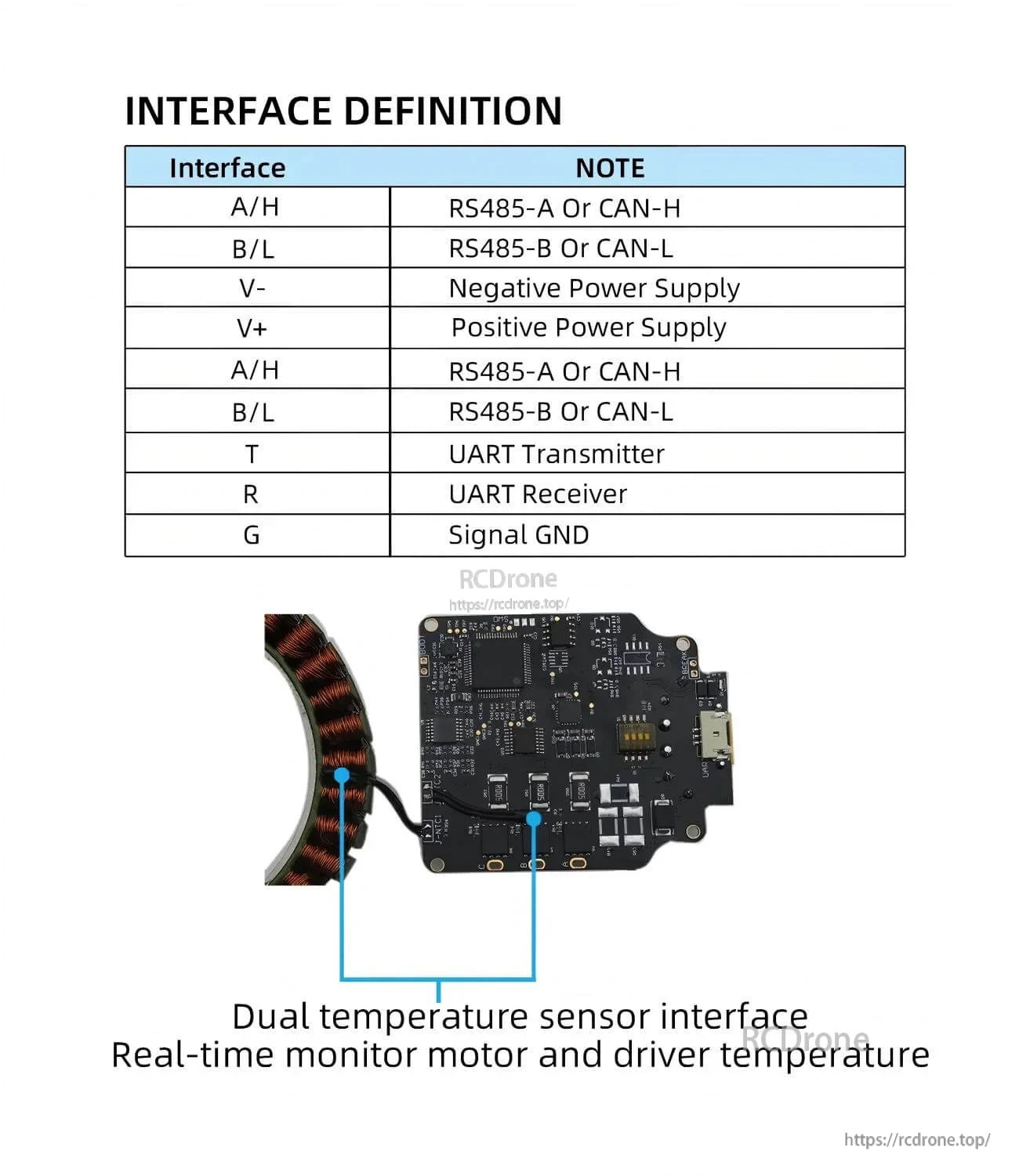
Jasne definicje pinów i podwójne wejścia czujników temperatury upraszczają okablowanie i umożliwiają monitorowanie termiczne silnika/sterownika w czasie rzeczywistym.
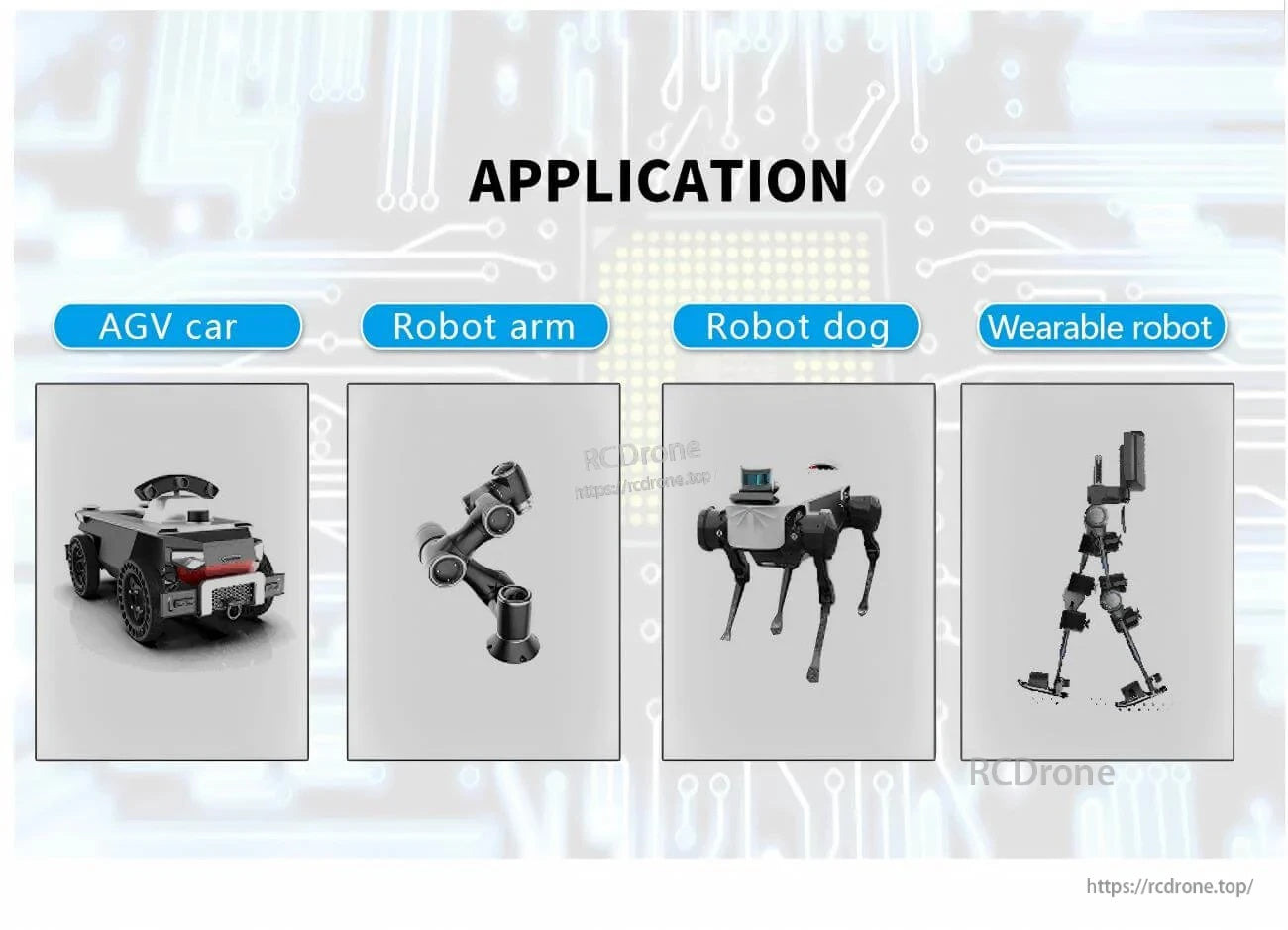
Odpowiedni dla platform takich jak AGV, ramiona robotyczne, czworonogi i roboty noszone, gdzie potrzebny jest kompaktowy moment obrotowy.
Related Collections




