




LKMTECH MG6012-i36-V3 Silnik 24V/48V 25N.m 1:36 Przekładnia planetarna, RS485/CAN, Enkoder 18bit
LKMTECH MG6012-i36-V3 Silnik 24V/48V 25N.m 1:36 Przekładnia planetarna, RS485/CAN, Enkoder 18bit
LKMTECH
Nie można załadować gotowości do odbioru
Przegląd
LKMTECH MG6012-i36-V3 Silnik to moduł silnika bezszczotkowego o wysokiej mocy z reduktorem planetarnym oraz wsparciem komunikacji enkodera/napędu dla systemów ruchu robotycznego. Tekst pozycjonujący produkt zawiera: „Najwyższy standard projektowania produktu”, „Wysoka moc wyjściowa”, „Duży moment obrotowy” oraz „Wysoka precyzja”.
Scenariusze zastosowania
- Roboty humanoidalne
- Ramiona robotyczne
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV / samochód AGV
- Roboty ARU
- Pies robot
- Robot noszony
Kluczowe cechy
- Silnik bezszczotkowy o dużej mocy
- Reduktor planetarny o wysokiej precyzji
- Wysokowydajny sterownik FOC (odniesienie tekstowe)
- Napięcie wejściowe napędu: 12-60V
- Komunikacja: CAN lub RS485
- Główna kontrola: 170M częstotliwości głównej z 32-bitowym ARM (odniesienie tekstowe)
- Enkoder: 18-bitowy enkoder absolutny z pojedynczym pierścieniem / 18-bitowy enkoder magnetyczny (oba wymienione)
- „Jedna kalibracja, zero pozycji nigdy nie zgubione, nie trzeba szukać punktu zerowego po utracie zasilania.” (stwierdzone)
- Przełącznik ID (stwierdzone)
- Interfejs podwójnego czujnika temperatury; monitorowanie temperatury silnika i sterownika w czasie rzeczywistym (stwierdzone)
Specyfikacje
| Parametr | Wersja 24V | Wersja 48V |
|---|---|---|
| Nazwa przedmiotu | MG6012-i36-V3 | MG6012-i36-V3 |
| Napięcie znamionowe | 24V | 48V |
| Maksymalna prędkość | 45RPM | 88RPM |
| Moment obrotowy znamionowy | 25N.m | 25N.m |
| Prędkość znamionowa | 45RPM | 74RPM |
| Prąd znamionowy | 4A | 4.8A |
| Maksymalna moc | 140W | 500W |
| Maksymalny moment obrotowy | 40N.m | 40N.m |
| Stała prędkości | 67rpm/V | 67rpm/V |
| Stała momentu | 0.175N.m/A | 0.146N.m/A |
| Obroty | 15 | 15 |
| Typ uzwojenia | Y | Y |
| Opór fazy | 0.63Ω | 0.63Ω |
| Indukcyjność fazy | 0.28mH | 0.28mH |
| Polary silnika | 28 | 28 |
| Inercja wirnika | 930 | 908 |
| Temperatura silnika | TAK | TAK |
| Typ reduktora | PG4136 | PG4136 |
| Stosunek redukcji | 1:36 | 1:36 |
| Luzy | ≤12 arcmin | ≤12 arcmin |
| Obciążenie nominalne łożyska | 1770N | 1770N |
| Waga silnika | 503g | 503g |
| Zalecany napęd | DG60 | DG60 |
| Napięcie wejściowe napędu | 12-60V | 12-60V |
| Komunikacja | RS485 LUB CAN | RS485 LUB CAN | Częstotliwość komunikacji | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Enkoder | Enkoder magnetyczny 18bit | Enkoder magnetyczny 18bit |
| Prędkość baud enkodera (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Prędkość baud (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Tryb sterowania | Pętla momentu (32KHz)/Pętla prędkości (8KHz)/Pętla pozycji (4KHz) | Pętla momentu (32KHz)/Pętla prędkości (8KHz)/Pętla pozycji (4KHz) |
| Krzywa przyspieszenia | Przyspieszenie trapezowe | Przyspieszenie trapezowe |
Definicja interfejsu
CAN/RS485 i przełącznik ID są dostarczane (podano). Notatki interfejsu:
| Interfejs | Notatka |
|---|---|
| A/H | RS485-A lub CAN-H |
| B/L | RS485-B lub CAN-L |
| V- | Ujemne zasilanie |
| V+ | Dodatnie zasilanie |
| T | Transmiter UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
Podręczniki / Dokumenty
W przypadku pytań dotyczących integracji (konfiguracja CAN/RS485, wybór prędkości baud lub parowanie kontrolera), skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Szczegóły

MG6012-i36-V3 integruje bezszczotkowy silnik, reduktor planetarny oraz komunikację enkodera dla stawów robotycznych.
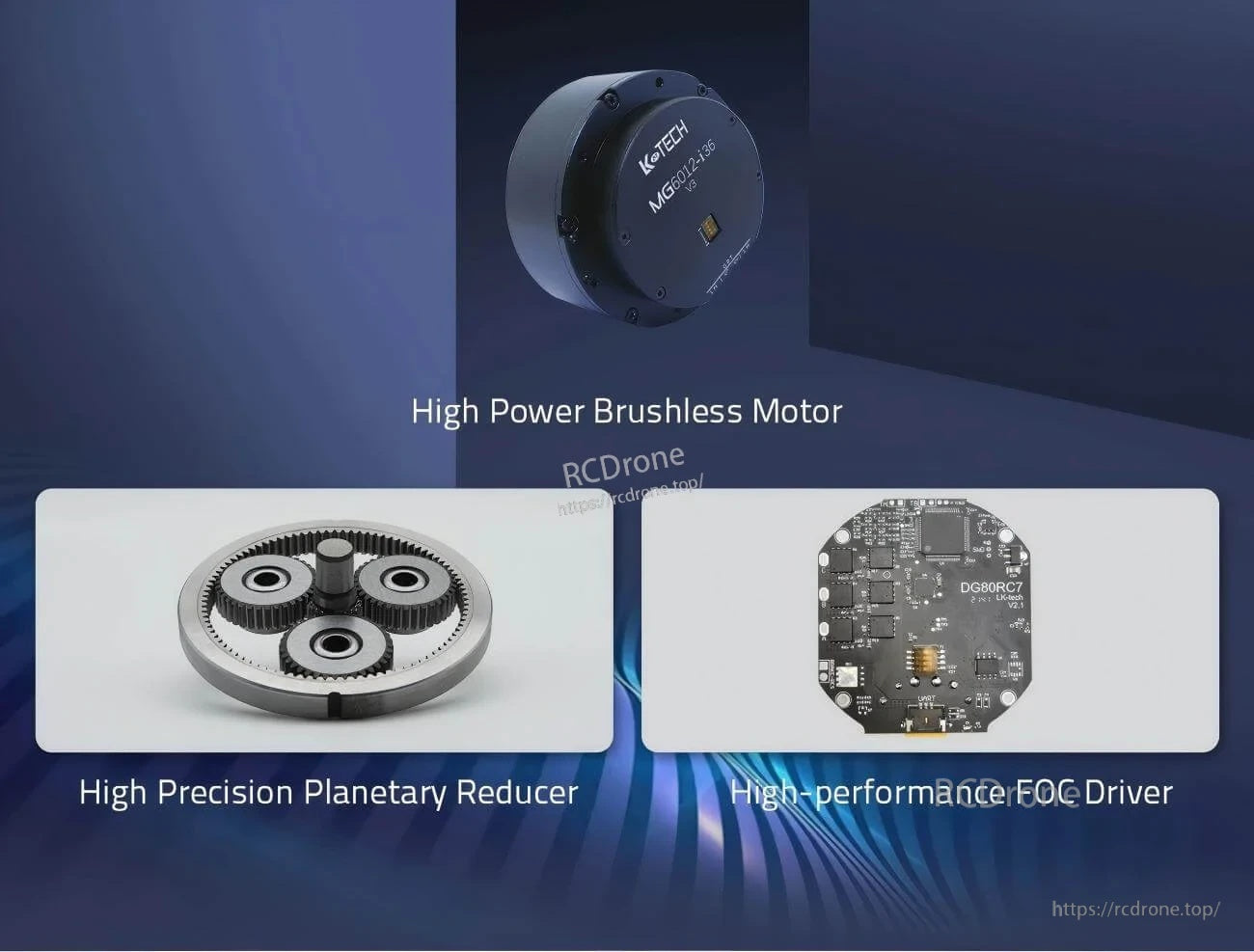
Kompaktowy system napędowy oparty na rdzeniu silnika o dużej mocy, precyzyjnym reduktorze planetarnym i sterowniku FOC.
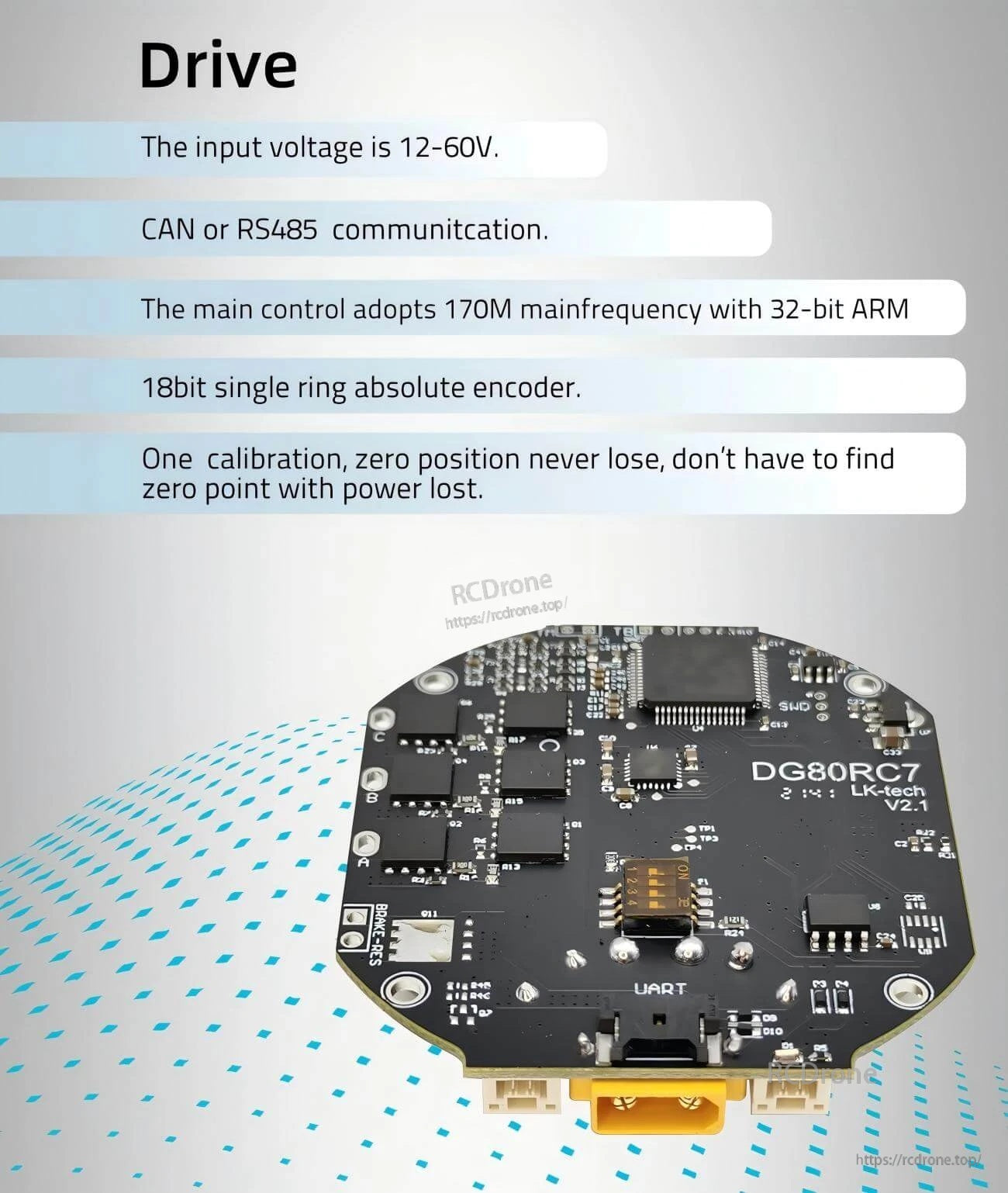
Elektronika kontrolera obsługuje zasilanie 12–60V z komunikacją CAN lub RS485 oraz opcją enkodera absolutnego 18-bitowego.
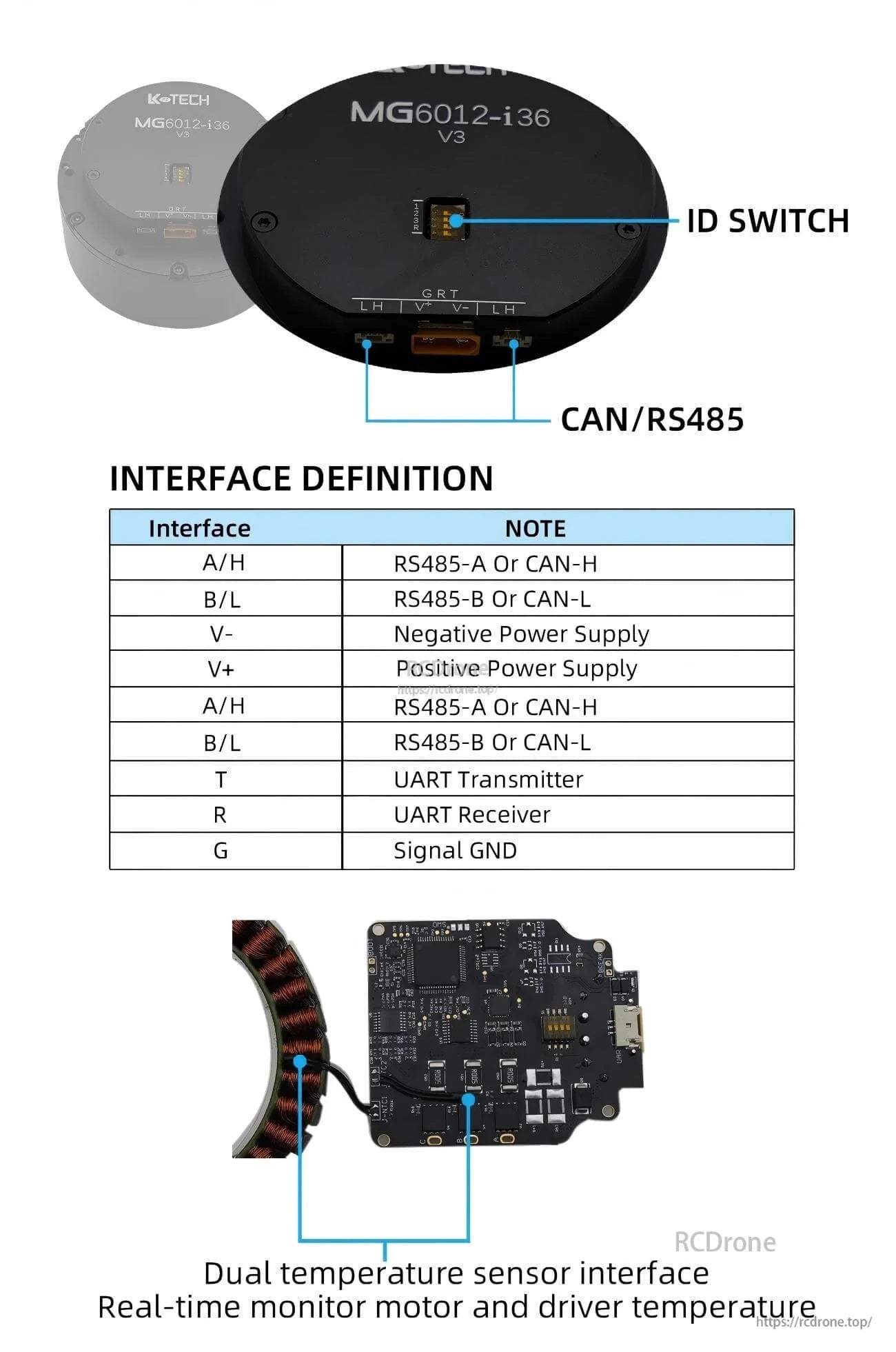
Jasne definicje pinów i wbudowany przełącznik ID pomagają uprościć okablowanie i konfiguracje multi-węzłowe CAN/RS485.

Reduktor planetarny 1:36 został zaprojektowany z myślą o niskim luzie i wysokim momencie obrotowym w precyzyjnych zespołach ruchowych.
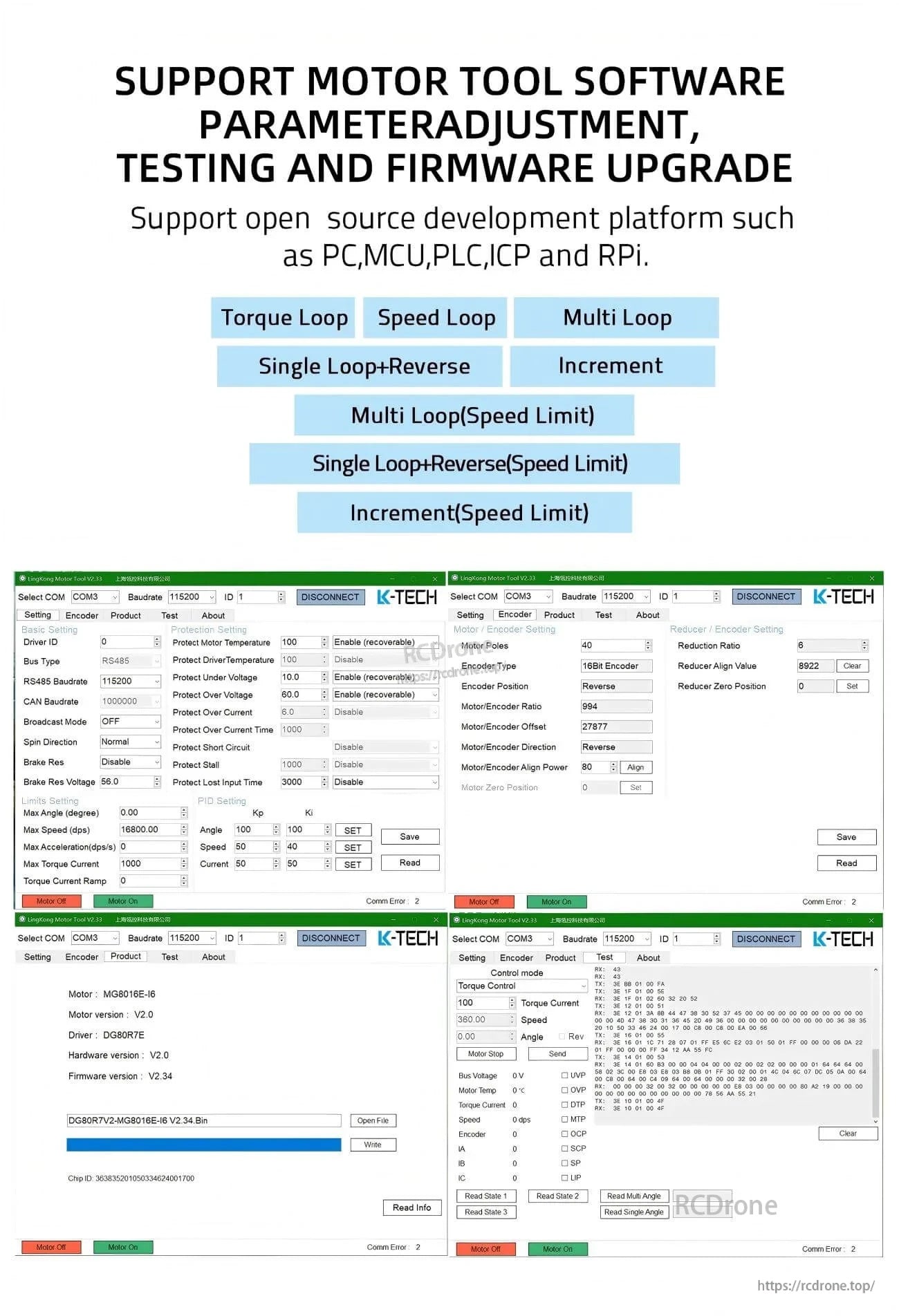
Oprogramowanie konfiguracyjne wspiera dostosowywanie parametrów, testowanie trybu pętli oraz aktualizacje oprogramowania na popularnych platformach deweloperskich.
Odpowiedni do zastosowań w robotyce, takich jak AGV, ramiona robotyczne, czworonogi oraz mechanizmy noszone/egzoszkielety.
Related Collections




