




Silnik LKMTECH MG6012E-i8-V2 48V 6N.m znamionowy, 16N.m maks., przekładnia planetarna 1:8, enkoder RS485/CAN
Silnik LKMTECH MG6012E-i8-V2 48V 6N.m znamionowy, 16N.m maks., przekładnia planetarna 1:8, enkoder RS485/CAN
LKMTECH
Cena regularna
$411.00 USD
Cena regularna
Cena promocyjna
$411.00 USD
Cena jednostkowa
na
Z wliczonymi podatkami.
Koszt wysyłki obliczony przy realizacji zakupu.
Nie można załadować gotowości do odbioru
Przegląd
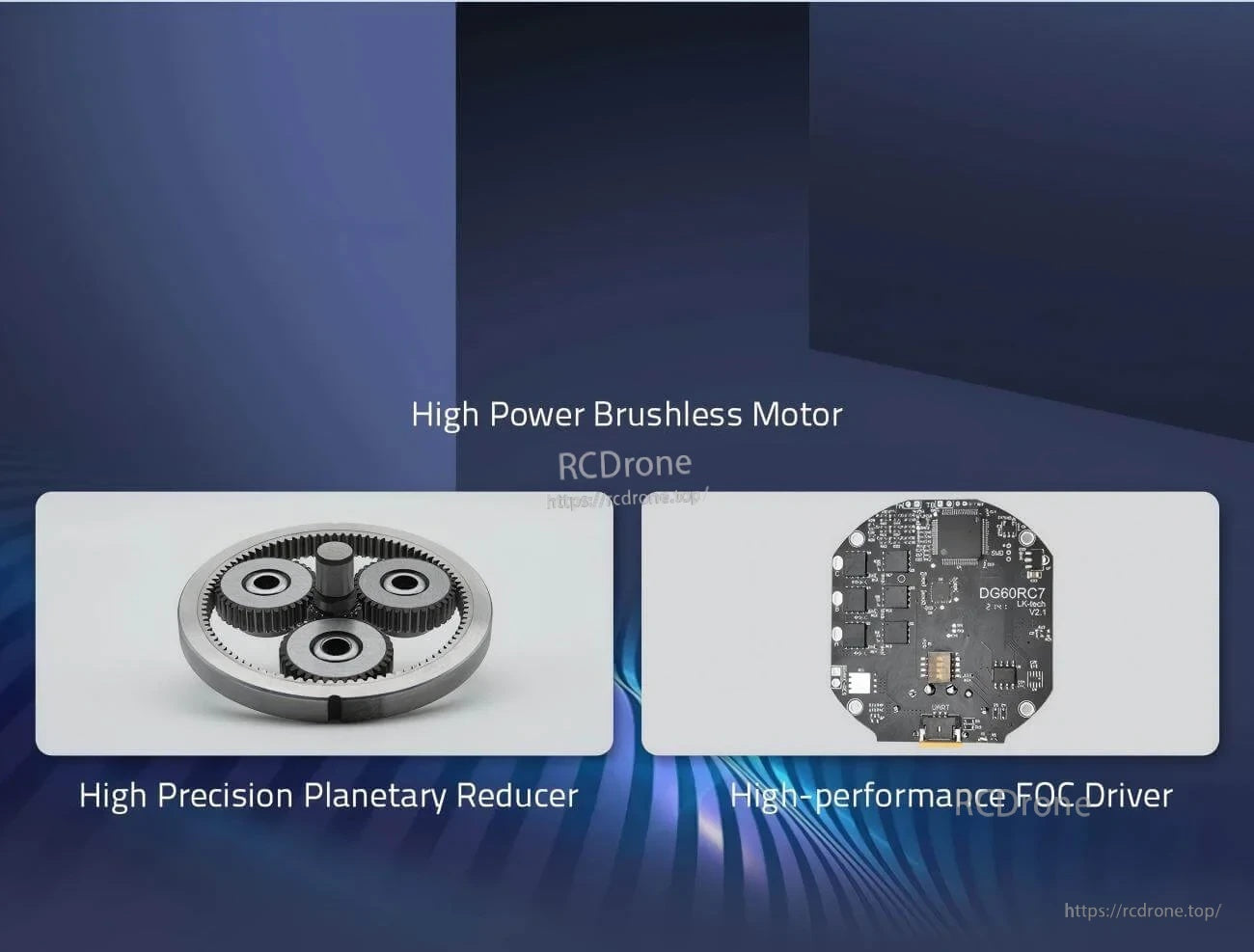
LKMTECH MG6012E-i8-V2 Silnik to silnik bezszczotkowy o dużej mocy z precyzyjnym reduktorem planetarnym (przełożenie 1:8) oraz zintegrowanymi enkoderami magnetycznymi do zastosowań w kontroli ruchu. Został zaprojektowany z myślą o dużej mocy wyjściowej, dużym momencie obrotowym oraz wysokiej precyzji.
Kluczowe cechy
- Wysoka moc wyjściowa / duży moment obrotowy / wysoka precyzja
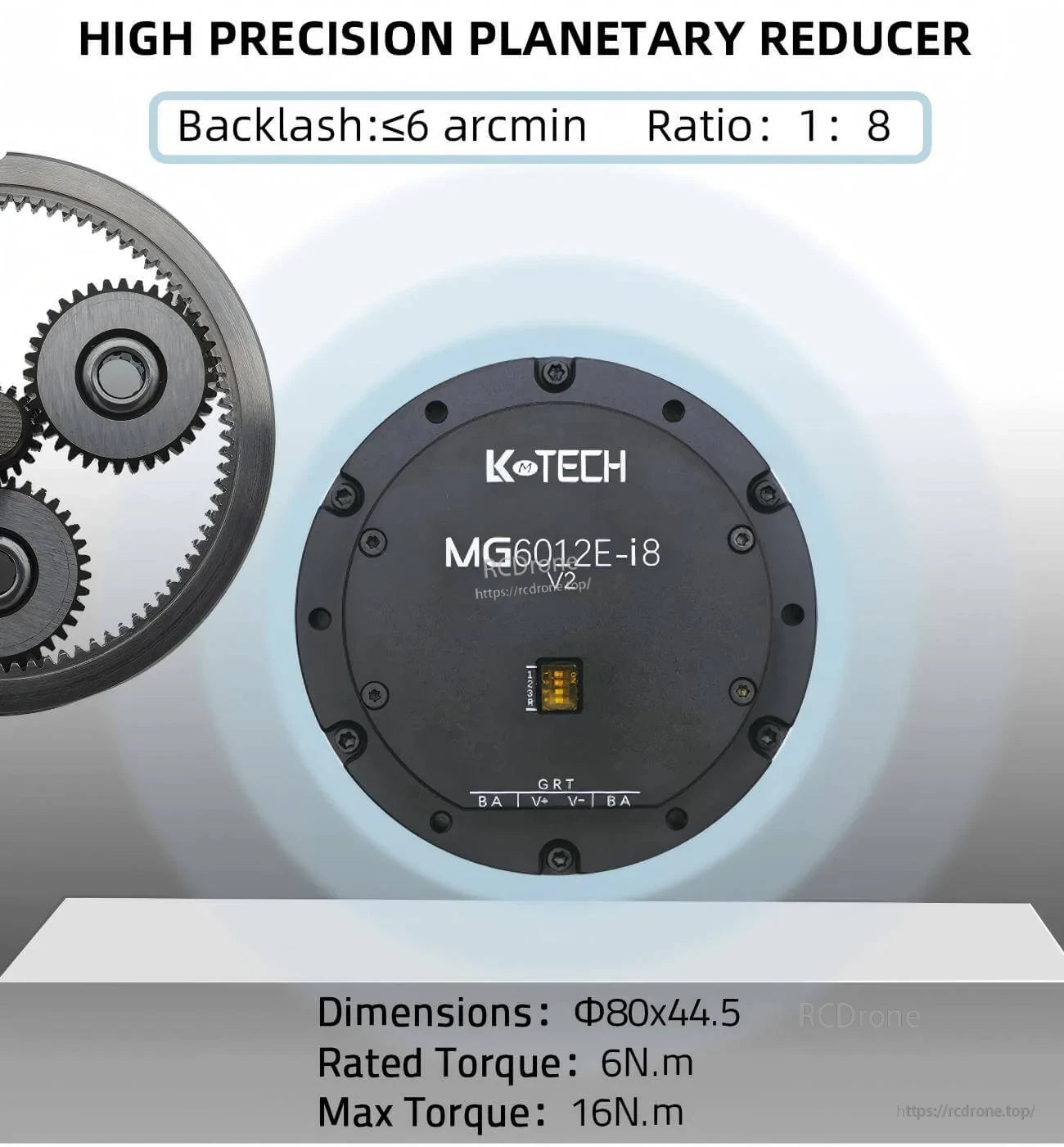
- Wysokoprecyzyjna przekładnia planetarna: luz ≤6 arcmin, stosunek 1:8
- Enkoder: 18-bitowy (silnik) + 14-bitowy (przekładnia) enkoder magnetyczny
- Opcje komunikacji: RS485 lub CAN
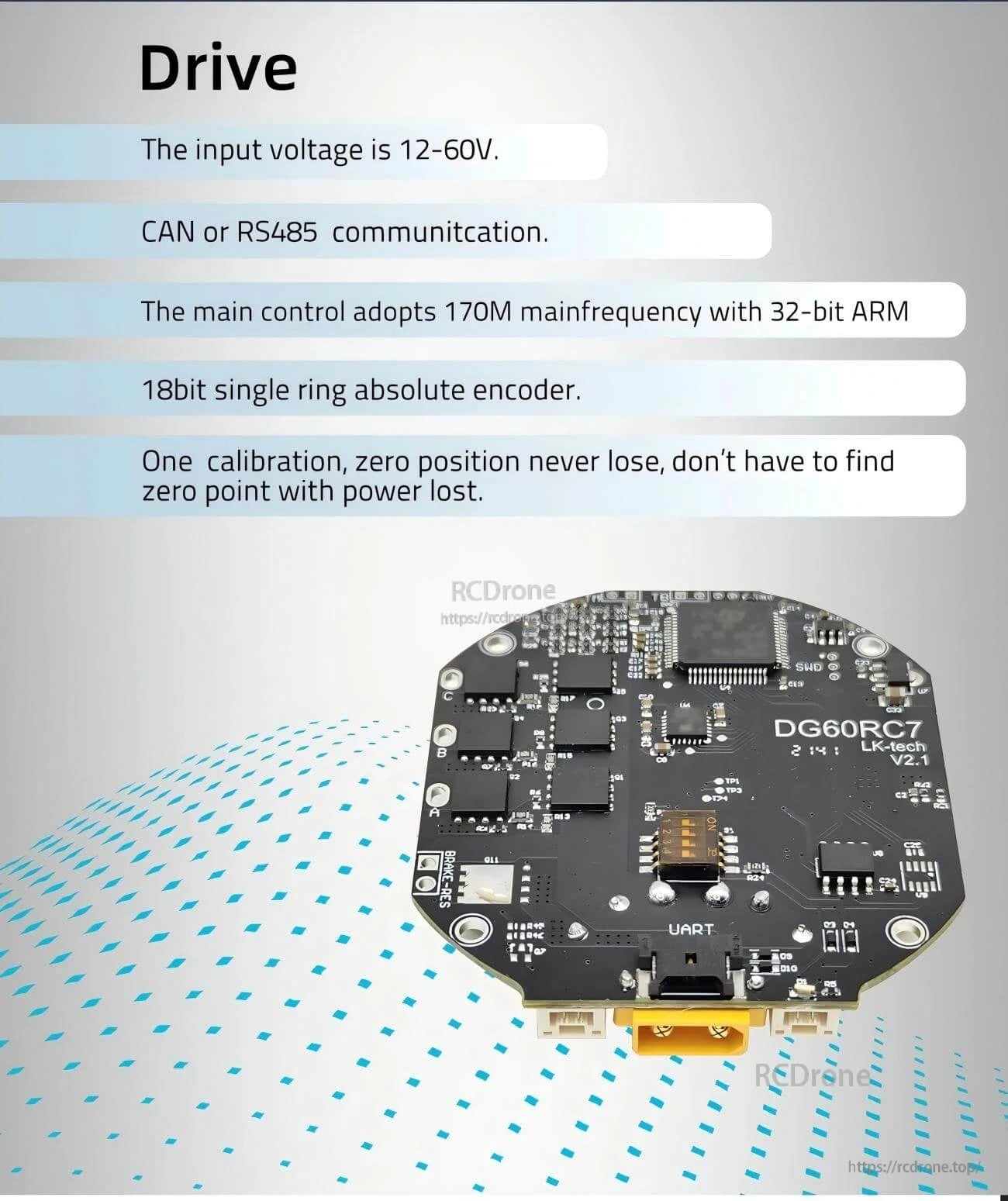
- Napięcie wejściowe napędu: 12-60V (zalecany napęd: DG60Ev2)
- 18-bitowy enkoder absolutny z pojedynczym pierścieniem; jedna kalibracja, pozycja zerowa nigdy nie ginie; nie ma potrzeby szukać zera po utracie zasilania
- Główna kontrola przyjmuje częstotliwość 170M z 32-bitowym ARM (tekst funkcji napędu)
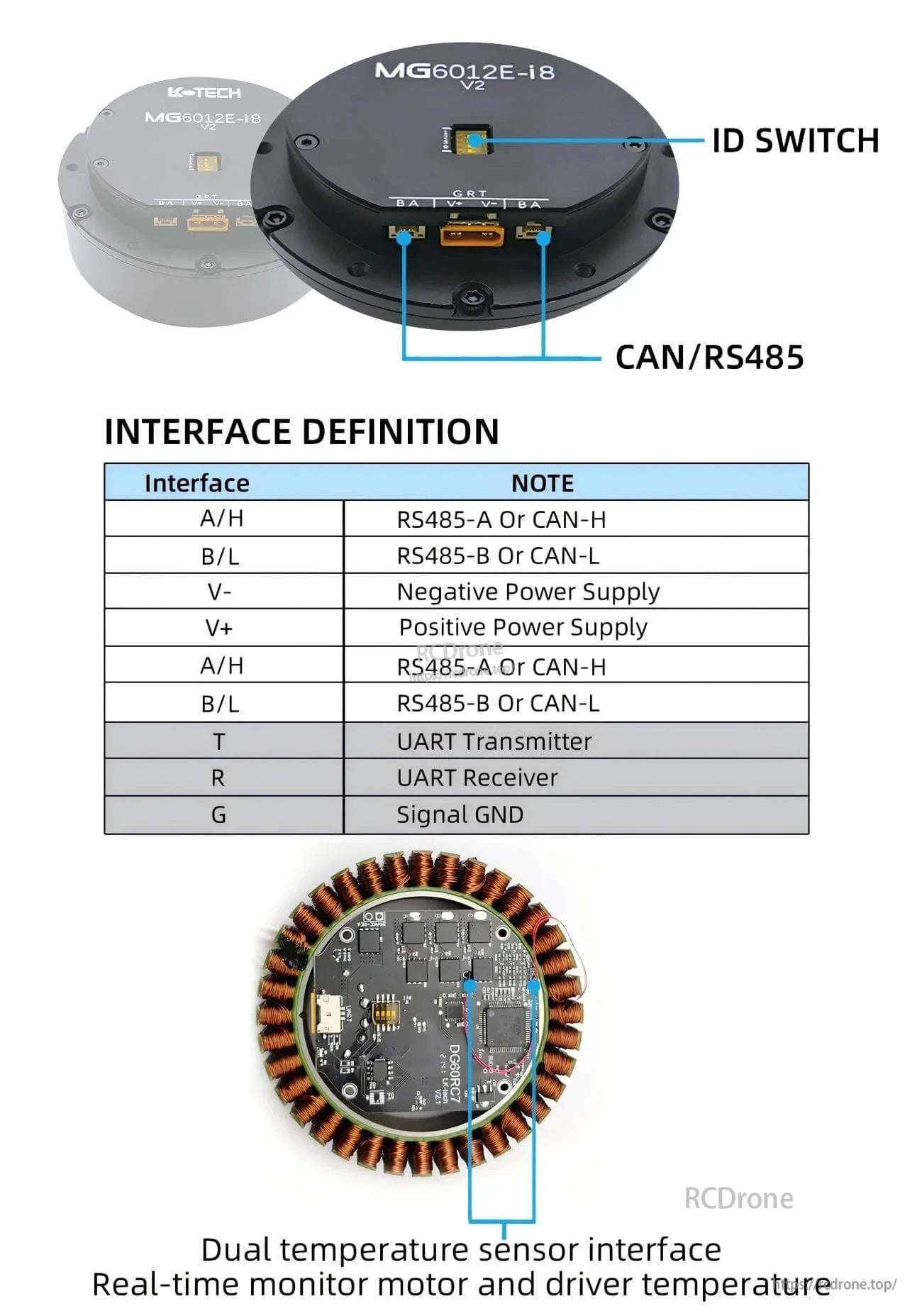
- Przełącznik ID; interfejs CAN/RS485; interfejs UART (T/R/G) dostępny zgodnie z definicją interfejsu
- Podwójny interfejs czujnika temperatury; monitorowanie temperatury silnika i napędu w czasie rzeczywistym
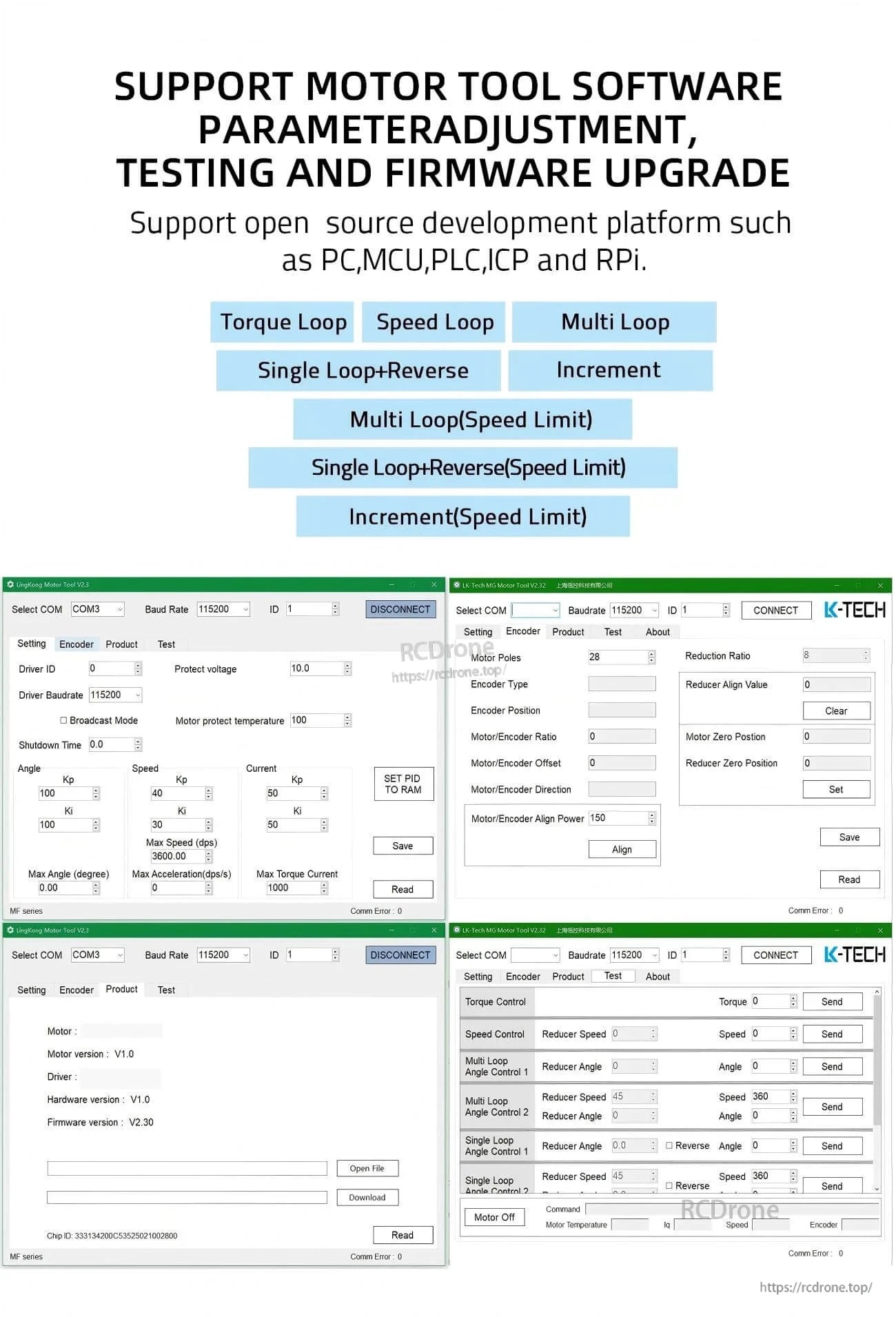
- Obsługuje oprogramowanie narzędziowe silnika: regulacja parametrów, testowanie i aktualizacja oprogramowania układowego
- Obsługuje otwarte platformy rozwojowe, takie jak PC, MCU, PLC, ICP i RPi
Specyfikacje
| Nazwa przedmiotu | MG6012E-i8-V2 |
| Napięcie znamionowe | 48V |
| Maksymalna prędkość | 310RPM |
| Moment obrotowy znamionowy | 6N.m |
| Maksymalny moment | 16N.m |
| Nominalna prędkość | 256RPM |
| Nominalny prąd | 3.5A |
| Maksymalna moc | 294W |
| Stała prędkości | 42.7rpm/V |
| Stała momentu | 1.09N.m/A |
| Obroty | 20 |
| Typ uzwojenia | Y |
| Opór fazy | 1.3Ω |
| Indukcyjność fazy | 0.55mH |
| Polary silnika | 28 |
| Inercja wirnika | 930gcm² |
| Temperatura silnika | TAK |
| Typ reduktora | PG4108 |
| Stosunek redukcji | 1:8 |
| Luzy | ≤6 arcmin |
| Obciążenie nominalne łożyska | 906N |
| Waga silnika | 430g |
| Wymiary | Φ80x44.5 |
| Rekomenduj napęd | DG60Ev2 |
| Napięcie wejściowe napędu | 12-60V |
| Komunikacja | RS485 LUB CAN |
| Częstotliwość komunikacji | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Enkoder | Enkoder magnetyczny 18bit(motor)+14bit(reduktor) |
| Prędkość baud enkodera (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Prędkość baud (CAN) | 1M |
| Tryb sterowania | Pętla momentu (32KHz)/Pętla prędkości (8KHz)/Pętla pozycji (4KHz) |
| Krzywa przyspieszenia | Przyspieszenie trapezowe |
Definicja interfejsu
| Interfejs | Uwaga |
|---|---|
| A/H | RS485-A lub CAN-H |
| B/L | RS485-B lub CAN-L |
| V- | Ujemne zasilanie |
| V+ | dodatnie zasilanie |
| T | Nadajnik UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
Zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety / roboty noszone
- Roboty czworonogie / pies robot
- Pojazdy AGV / samochód AGV
- Roboty ARU
Aby uzyskać wsparcie w integracji i pomoc w wyborze produktu, skontaktuj się [email protected] or odwiedź https://rcdrone.top/ .
Instrukcje / Pobieranie
Szczegóły



Related Collections




