




LKMTECH MG6012E-i8B-V3 Silnik 48V Planetarny Silnik Przekładniowy 1:8 Hamulec RS485/CAN Magnetyczny Enkoder
LKMTECH MG6012E-i8B-V3 Silnik 48V Planetarny Silnik Przekładniowy 1:8 Hamulec RS485/CAN Magnetyczny Enkoder
LKMTECH
Nie można załadować gotowości do odbioru
Przegląd
Silnik LKMTECH MG6012E-i8B-V3 to dwustopniowy silnik planetarny z hamulcami, zaprojektowany do robotyki i automatyzacji siłowników wymagających kompaktowych rozmiarów, wysokiego momentu obrotowego i komunikacji cyfrowej.
Kluczowe cechy
- Silnik planetarny z dwustopniową przekładnią i hamulcem
- Przełożenie: 1:8
- Luźność przekładni: arcmin (tekst na obrazie); 6 arcmin (specyfikacja)
- Rozmiar silnika: 80*60
- 18-bitowy jednokierunkowy absolutny enkoder magnetyczny (tekst na obrazie)
- Konfiguracja enkodera: 18bit (silnik) + 14bit (reduktor) enkoder magnetyczny
- Komunikacja: RS485 lub CAN
- Zalecany napęd: DG60Ev2; napięcie wejściowe napędu: 12-60V
- Podwójne enkodery, zapamiętują punkt zerowy po wyłączeniu zasilania (tekst na obrazie)
- Wsparcie dla otwartych platform rozwojowych, takich jak PC, MCU, PLC, ICP i RPi (tekst na obrazie)
- Tryb sterowania (specyfikacja): Pętla momentu (32KHz) / Pętla prędkości (8KHz) / Pętla pozycji (4KHz)
- Krzywa przyspieszenia: Przyspieszenie trapezowe
Aby uzyskać wskazówki dotyczące wyboru lub wsparcia w integracji, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Specyfikacje
| Nazwa przedmiotu | MG6012E-i8B-V3 |
| Napięcie znamionowe | 48V |
| Max prędkość | 310RPM |
| Prędkość znamionowa | 256RPM |
| Moment obrotowy znamionowy | 6N.m |
| Max moment obrotowy | 16N.m |
| Prąd znamionowy | 3.5A |
| Max moc | 294W |
| Stała prędkości | 42.7rpm/V |
| Stała momentu | 1.09N.m/A |
| Obroty | 20 |
| Typ uzwojenia | Y |
| Opór fazy | 1.3 |
| Indukcyjność fazy | 0.55mH |
| Polary silnika | 28 |
| Inercja wirnika | 930gcm2 |
| Temperatura silnika | TAK |
| Typ reduktora | PG4108 |
| Przełożenie | 1:8 |
| Luzy | 6 arcmin |
| Obciążenie nominalne łożyska | 1800N |
| Waga silnika | 718g |
| Typ hamulca | MT15 |
| Moment hamujący | 1.5N.m |
| Napięcie rozruchowe | 24V |
| Moc rozruchowa | 17.5W |
| Napięcie podtrzymujące | 7V |
| Moc podtrzymująca | 1.5W |
| Rekomendowany napęd | DG60Ev2 |
| Napięcie wejściowe napędu | 12-60V |
| Komunikacja | RS485 LUB CAN |
| Częstotliwość komunikacji | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Enkoder | 18bit(motor)+14bit(reduktor) Enkoder magnetyczny |
| Prędkość baud enkodera (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Prędkość baud (CAN) | 100K, 125K, 250K, 500K, 1M |
| Tryb sterowania | Pętla momentu (32KHz)/Pętla prędkości (8KHz)/Pętla pozycji (4KHz) |
| Krzywa przyspieszenia | Przyspieszenie trapezowe |
Definicja interfejsu (Tekst obrazu)
- Przełącznik ID
- Ujemne zasilanie
- Zasilanie dodatnie
- CAN / RS485 (LH) (AB)
| Port | Instrukcje |
|---|---|
| A/H | RS485-A lub CAN-H |
| B/L | RS485-B lub CAN-L |
| V- | Zasilanie ujemne |
| V+ | Zasilanie dodatnie |
| A/H | RS485-A lub CAN-H |
| B/L | RS485-B lub CAN-L |
| T | Transmiter UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
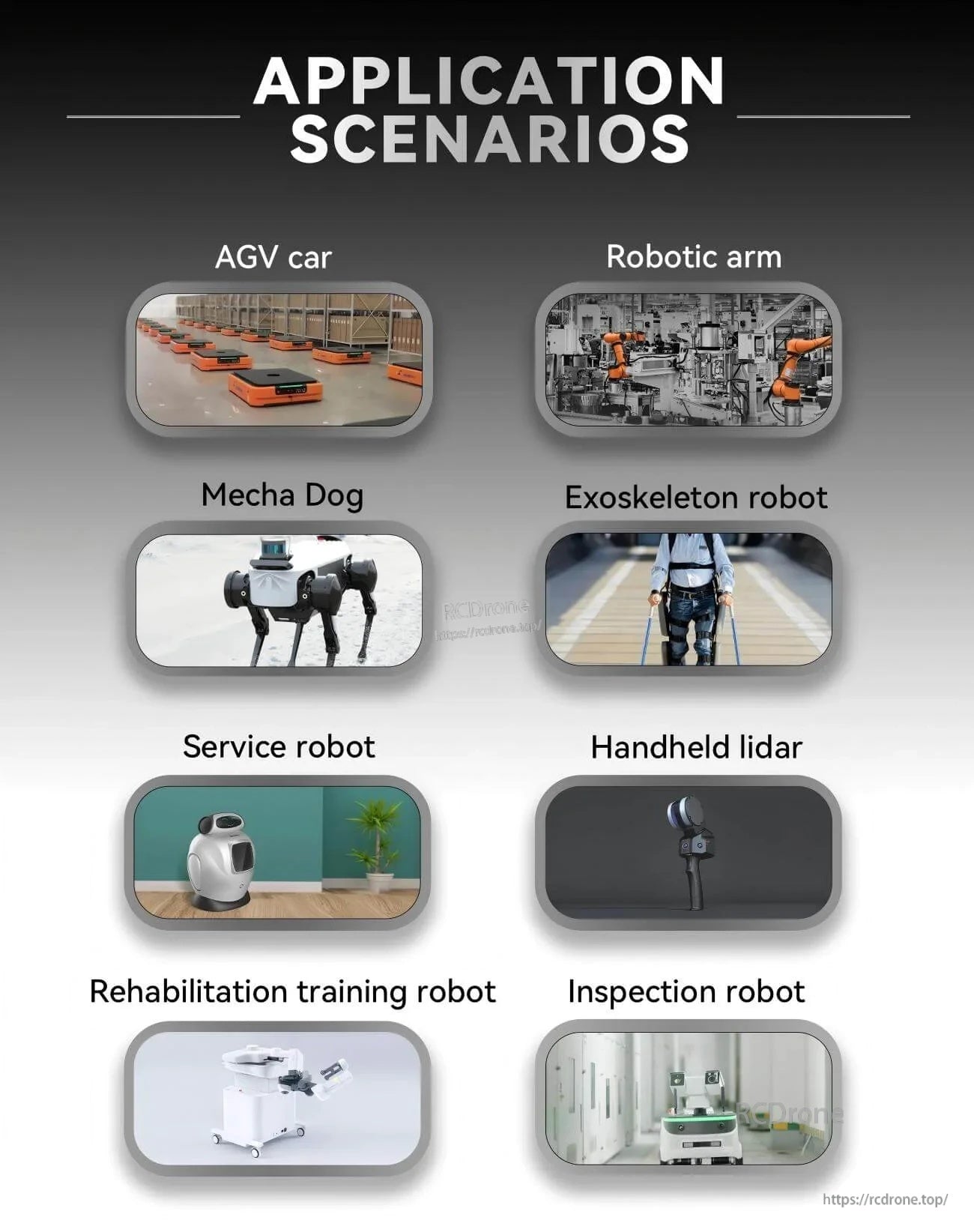
Zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV / samochód AGV
- Roboty ARU
- Mecha Dog
- Robot serwisowy
- Ręczny lidar
- Robot do treningu rehabilitacyjnego
- Robot inspekcyjny
Podręczniki
Szczegóły

Kompaktowy silnik planetarny o dwóch stopniach z hamulcem do napędów robotycznych, gdzie wysoki moment obrotowy i małe wymiary mają znaczenie.
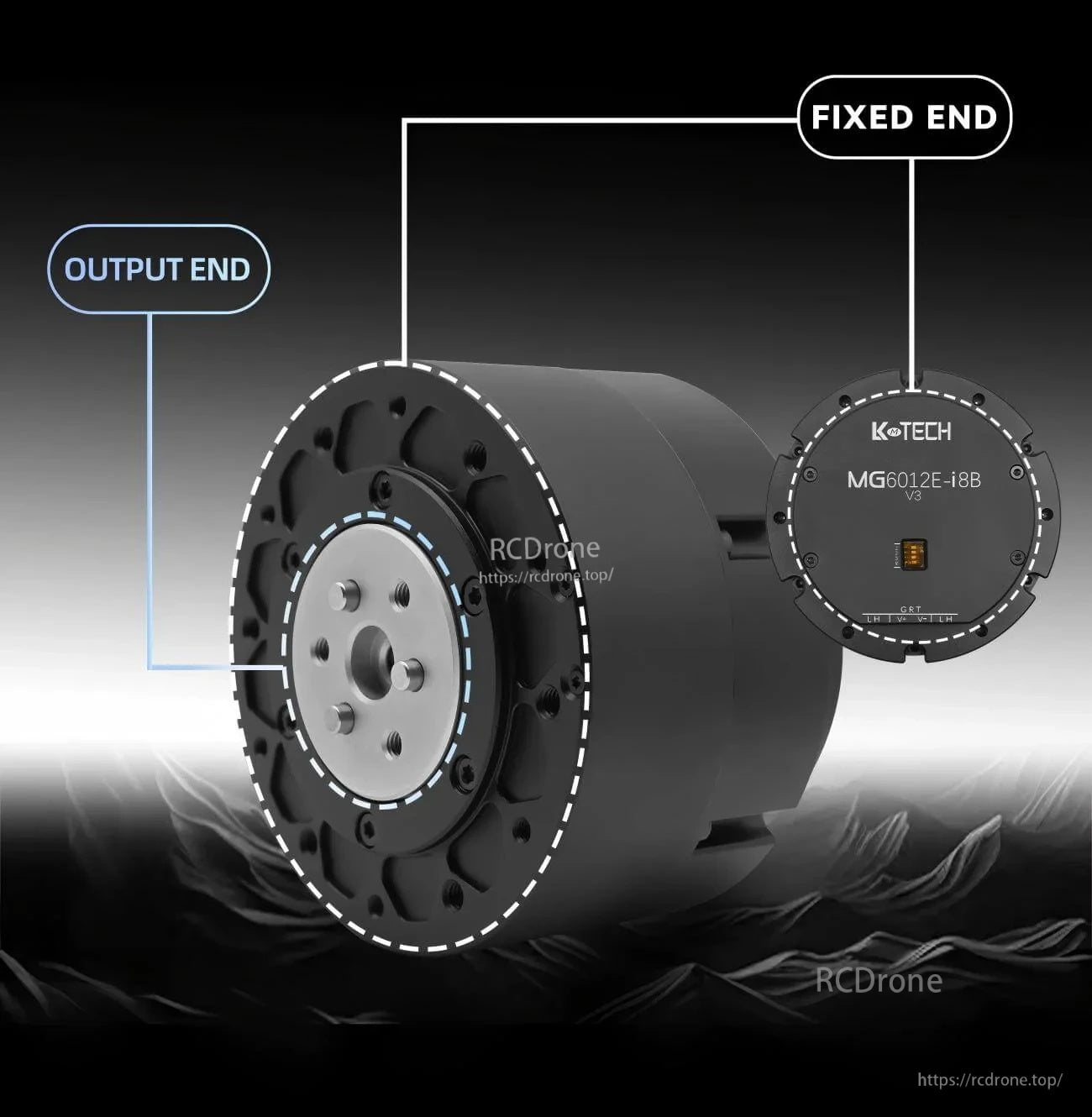
Oba końce wyjściowe i stałe są zaprojektowane do łatwego montażu w złączach, ramionach i innych zespołach siłowników.

18-bitowy jednokrotny absolutny enkoder magnetyczny i zintegrowane wsparcie hamulca zapewniają precyzyjną kontrolę i stabilne utrzymanie pod obciążeniem.
Odpowiedni do projektów automatyzacji, takich jak moduły napędowe AGV, ramiona robotyczne, czworonogi, egzoszkielety i roboty inspekcyjne.
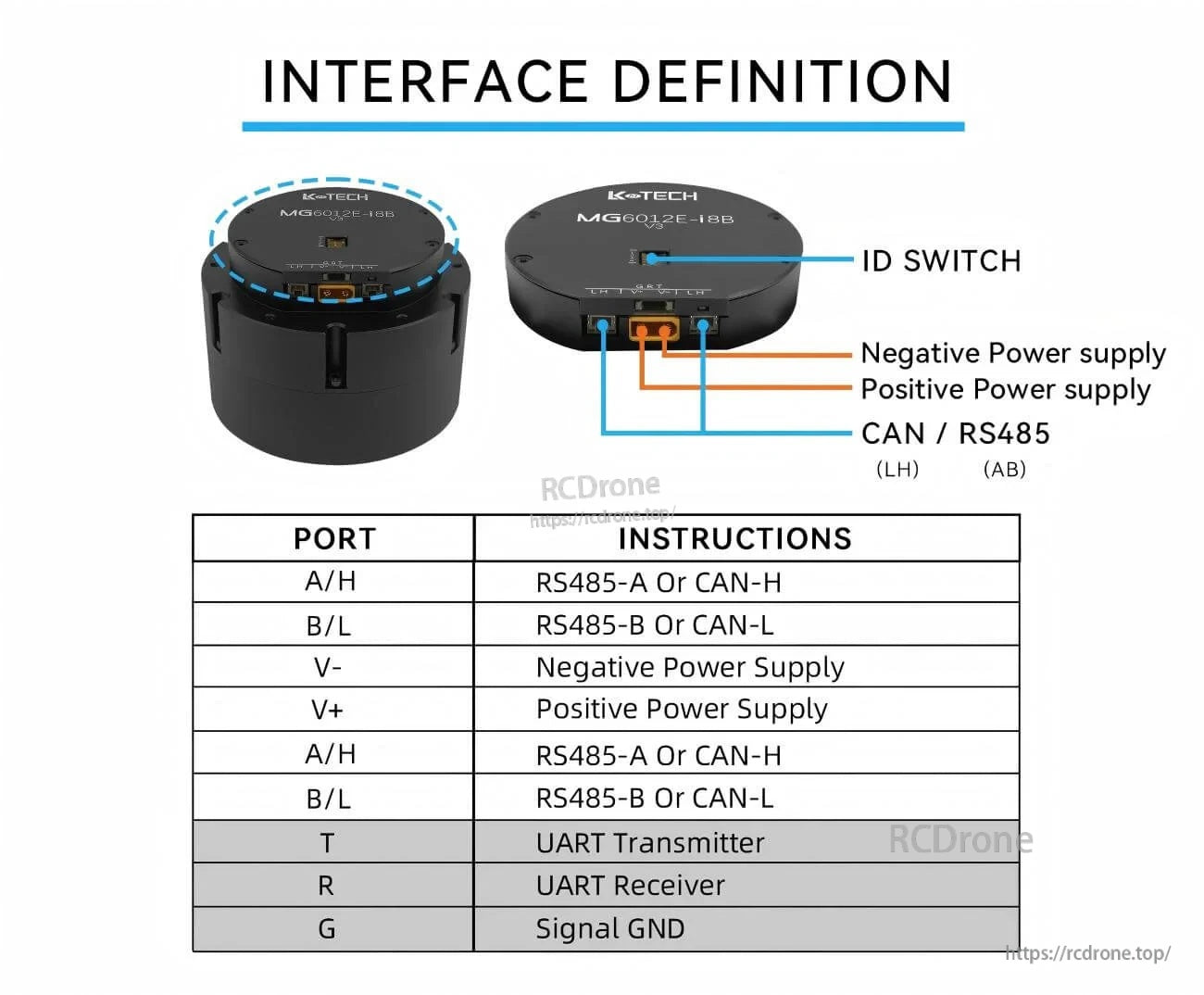
Jasne oznaczenia portów pomagają przyspieszyć okablowanie dla zasilania, konfiguracji ID oraz komunikacji RS485/CAN.
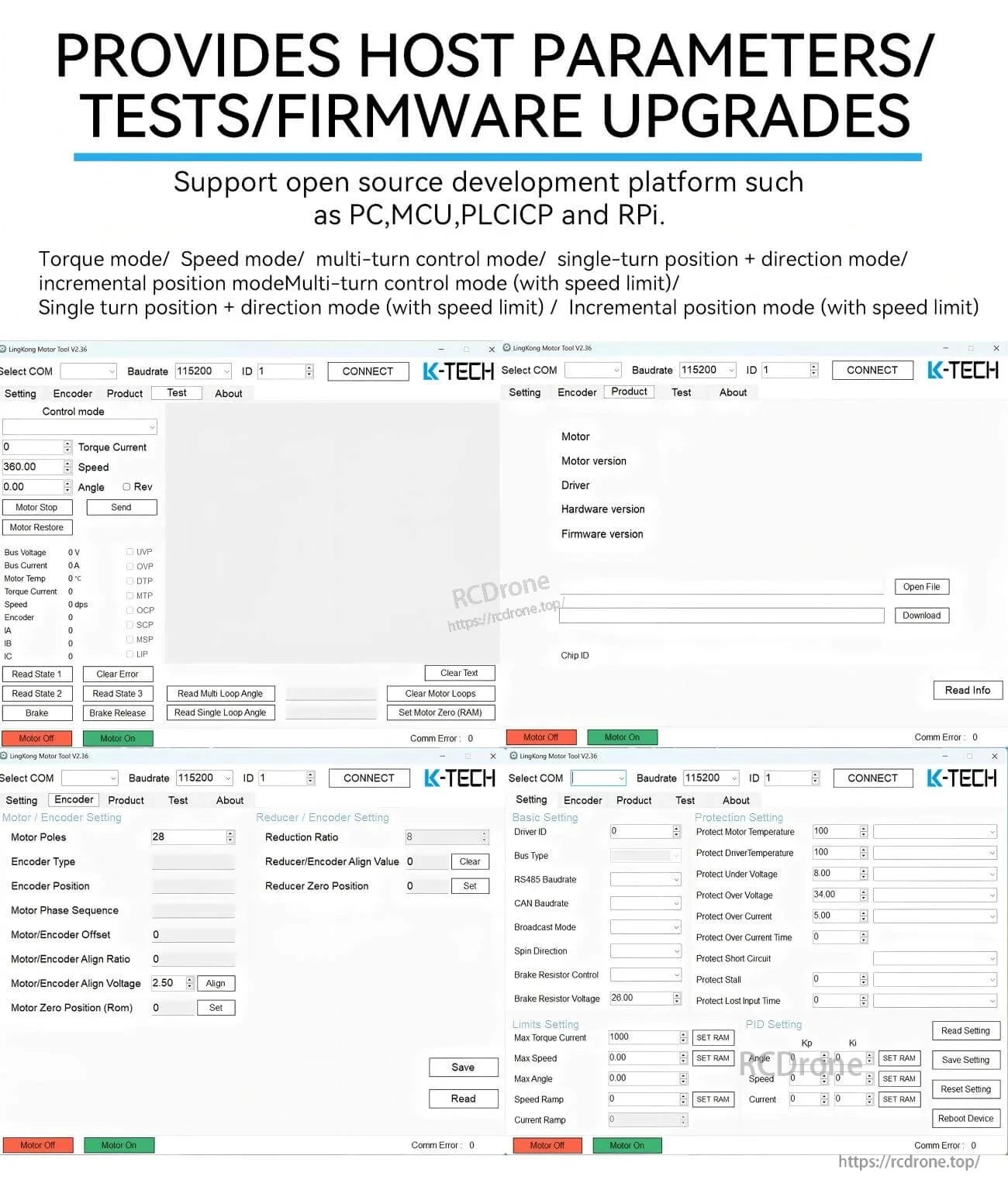
Narzędzia hosta zapewniają konfigurację parametrów, testowanie i aktualizacje oprogramowania na wspólnych platformach deweloperskich.
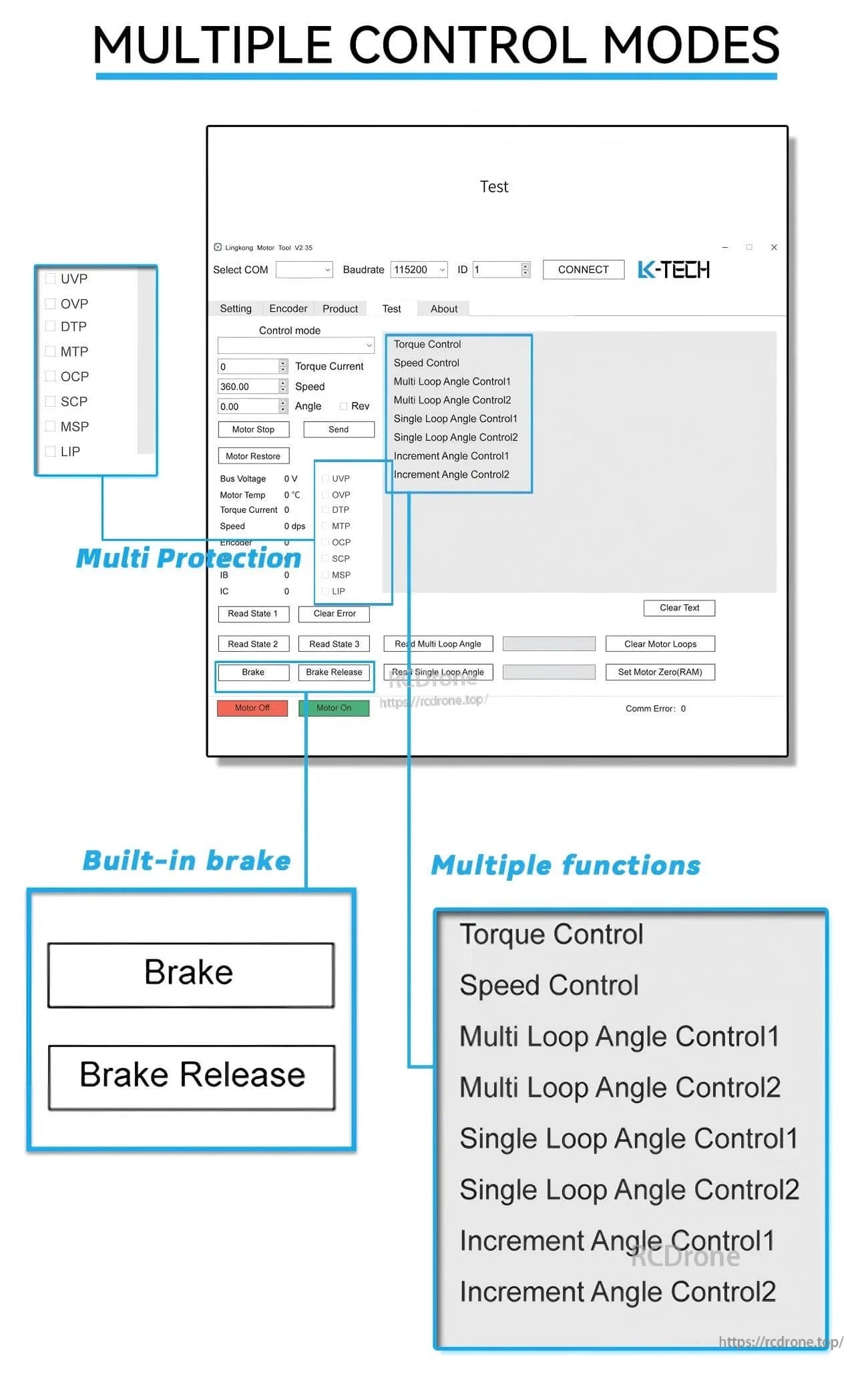
Tryby kontroli momentu obrotowego, prędkości i pozycji można wybrać, aby dopasować do różnych siłowników i wymagań dotyczących kontroli ruchu.

Related Collections




