Mad Ampx 300A (12-24S) HV Drone ESC
Mad Ampx 300A (12-24S) HV Drone ESC
MAD
Nie można załadować gotowości do odbioru
MAD AMPX 300A (12–24S) HV Drone ESC – Opis produktu
MAD AMPX 300A (12–24S) HV Drone ESC to wydajny elektroniczny regulator prędkości przeznaczony do wymagających zastosowań, takich jak drony o dużym udźwigu, elektryczne paralotnie i inne systemy powietrzne lub przemysłowe o dużej mocy. Obsługuje szeroki zakres napięć od 12S do 24S (około 40 V do 100 V) i zapewnia ciągły prąd do 300 A, zapewniając mocny i niezawodny napęd w ekstremalnych warunkach obciążenia. Liczne funkcje zabezpieczające i stopień ochrony IPX4 sprawiają, że doskonale nadaje się do profesjonalnych i przemysłowych środowisk, w których bezpieczeństwo, wydajność i trwałość są najważniejsze.
Główne cechy
• Możliwość dużego natężenia prądu
Obsługuje prąd ciągły o natężeniu 300 A, co czyni go odpowiednim do podnoszenia dużych ciężarów i operacji wymagających dużej siły ciągu.
• Szeroki zakres napięć
Działa wydajnie w zakresie napięć 12S–24S (40–100 V), obsługując różne konfiguracje baterii.
• Ochrona IPX4
Zapewnia ochronę przed zachlapaniem i kurzem, gwarantując niezawodną pracę w trudnych warunkach zewnętrznych.
• Zaawansowana kontrola i ochrona
Integruje ochronę przed przepięciem, niedopięciem, przetężeniem i zwarciem. V2.0 i V3.0 obejmują udoskonalone mechanizmy ochrony napięciowej; V3.0 dodatkowo posiada funkcję hamulca do zastosowań w paramotorach.
• Elastyczne opcje sygnału
W zależności od wersji obsługuje standardowe wejście PWM lub komunikację CAN, umożliwiając monitorowanie w czasie rzeczywistym i regulację parametrów.
• Zoptymalizowana konstrukcja chłodzenia
Posiada solidną konstrukcję radiatora i aluminiową obudowę, co zapewnia stabilną pracę przy ciągłym, wysokim obciążeniu.
Informacje o wersji
• Wersja 1.0 – Wersja podstawowa z samym sterowaniem PWM, bez komunikacji CAN i BEC.
• Wersja 2.0 – Zawiera komunikację CAN i wbudowany BEC. Przeznaczony do użytku z dronami, z oprogramowaniem układowym zoptymalizowanym pod kątem platform powietrznych. Posiada zaawansowany mechanizm ochrony napięcia.
• Wersja 3.0 – Zaprojektowany do zastosowań z elektrycznym napędem paralotniowym, wyposażony w komunikację CAN, oprogramowanie układowe specyficzne dla napędu paralotniowego, funkcję hamulca i kompatybilność z skrzynkami do konfiguracji paralotni z napędem. Zawiera specjalistyczne podejście do ochrony napięcia, aby sprostać wymaganiom bezpieczeństwa lotów z napędem paralotniowym.
Zalecany silnik i śmigło
AMPX 300A ESC działa wyjątkowo dobrze z silnikiem M40C30 pro IPE 43 kV, szczególnie w połączeniu z błyszczącym śmigłem z włókna węglowego o wymiarach 47,5 × 17,4 cala. Ta kombinacja zapewnia wysoki ciąg, płynną pracę i wydajne wykorzystanie mocy w przypadku dużych konfiguracji dronów lub paralotni.
Dane techniczne
| Parametr | Bliższe dane |
|---|---|
| Model | Regulator wysokiego napięcia AMPX 300A |
| Obsługiwana liczba ogniw LiPo | 12–24S (40–100 V) |
| Prąd ciągły | 300 A |
| Limit szczytowy/prądowy | 300 A |
| Poziom ochrony | IPX4 |
| Sygnał wejściowy | PWM (50–400 Hz) lub CAN (zależnie od wersji) |
| Wyjście BEC | Dostępne w wersji V2.0 (niedostępne w wersji V1.0) |
| Funkcja hamulca | Zawarte w wersji 3.0 (oprogramowanie układowe paramotoru) |
| Wymiary (około)) | Wymiary: 84 mm × 63 mm × 45 mm |
| Długość przewodu sygnałowego | 400 mm |
| Główne cechy ochronne | Nadmierny prąd, zwarcie, przepięcie, podnapięcie, nadmierna temperatura |
Wytyczne dotyczące instalacji i użytkowania
Upewnij się, że polaryzacja jest prawidłowa i użyj kabli o wysokiej wartości prądu. W przypadku jednostek V2.0 lub V3.0 podłącz linie CAN prawidłowo, jeśli używasz zaawansowanych funkcji komunikacyjnych. Zapewnij wystarczający przepływ powietrza lub przestrzeń chłodzącą wokół ESC i bezpiecznie zamontuj go, aby zminimalizować wibracje. Podczas pierwszego testowania zacznij od minimalnego obciążenia, aby sprawdzić obroty silnika, zachowanie temperatury i funkcje ochronne przed zastosowaniem pełnych obciążeń roboczych. Regularnie sprawdzaj wszystkie połączenia, przewody i osprzęt montażowy.
Typowe problemy i rozwiązywanie problemów
• Silnik nie uruchamia się
– Sprawdź napięcie akumulatora, okablowanie ESC i wyjście sygnału kontrolera lotu.
• Zacinanie się silnika lub wibracje
– Sprawdź poprawność okablowania faz silnika i mapowania silnika kontrolera lotu.
• Przegrzanie lub wyłączenie
– Zapewnij odpowiednie chłodzenie i potwierdź, że specyfikacje silnika/śmigła odpowiadają wymaganiom obciążeniowym danego zastosowania.
• Alarm niskiego napięcia
– Sprawdź pojemność akumulatora i stopień rozładowania; w razie potrzeby naładuj lub wymień akumulator.
Bezpieczeństwo i wyłączenie odpowiedzialności
Postępuj zgodnie z lokalnymi przepisami regulującymi loty dronów o dużej mocy lub paralotni. Zachowaj bezpieczną odległość od ludzi i mienia oraz regularnie sprawdzaj system. Wszelkie modyfikacje lub użycie nieoryginalnych części może prowadzić do nieprzewidzianych zagrożeń. Zawsze postępuj zgodnie z wytycznymi producenta i upewnij się, że wszystkie komponenty są bezpiecznie zamocowane.
Scenariusze, których dotyczy
Ten ESC doskonale nadaje się do zastosowań dronów na dużą skalę, wymagających dużych udźwigów, wydłużonego czasu lotu lub operacji na dużych wysokościach. Doskonale sprawdza się również w konfiguracjach elektrycznych paramotorów (szczególnie z oprogramowaniem układowym V3.0), robotach przemysłowych, pojazdach specjalnego przeznaczenia i innych elektrycznych systemach napędowych o dużej mocy.
Wniosek
MAD AMPX 300A (12–24S) HV Drone ESC łączy solidną konstrukcję, wysokie natężenie prądu i elastyczne opcje komunikacji w jednym, wszechstronnym rozwiązaniu. Dzięki trzem wersjom dostosowanym do różnych potrzeb w zakresie sterowania i ochrony napięcia, oferuje niezawodne zarządzanie energią i zaawansowane funkcje, takie jak hamowanie (V3.0) i wbudowany BEC (V2.0). Niezależnie od tego, czy jest używany w dronie o dużym udźwigu, czy w systemie paralotni, AMPX 300A zapewnia wydajność i bezpieczeństwo wymagane przez profesjonalistów w najbardziej wymagających środowiskach lotu i napędu.

AMPX 300AV2 oferuje funkcje wielozabezpieczeniowe, obsługując podwójne sterowanie przepustnicą i komunikację CAN w czasie rzeczywistym. Zapewnia zwarcie, przeciągnięcie, napięcie, temperaturę, utratę przepustnicy, ochronę przed uruchomieniem i ustawienia kalibracji przepustnicy. Schemat połączeń ESC obejmuje szczegóły dotyczące silnika, akumulatora i przewodu sygnałowego w celu bezproblemowej integracji.
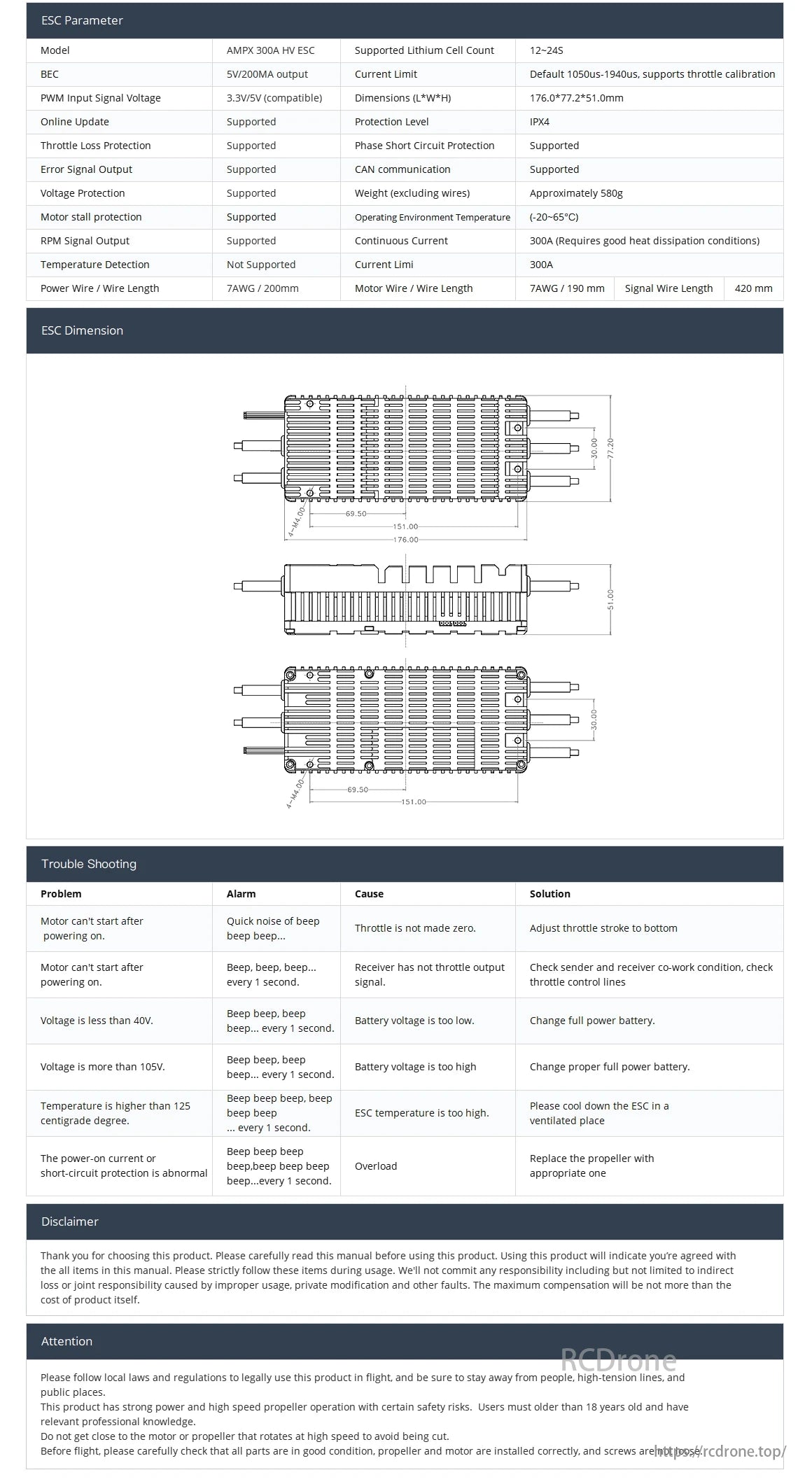
AMPX 300A HV ESC obsługuje ogniwa litowe 12-24S, z domyślnym limitem prądu 1050us-1940us. Posiada wyjście BEC, wejście PWM, aktualizacje online i różne zabezpieczenia. Wymiary to 176,0x77,2x51,0 mm, a waga wynosi około 580 g. Zakres temperatur roboczych od -20°C do 65°C. Rozwiązywanie problemów obejmuje problemy z uruchomieniem silnika, limity napięcia i alerty temperatury.
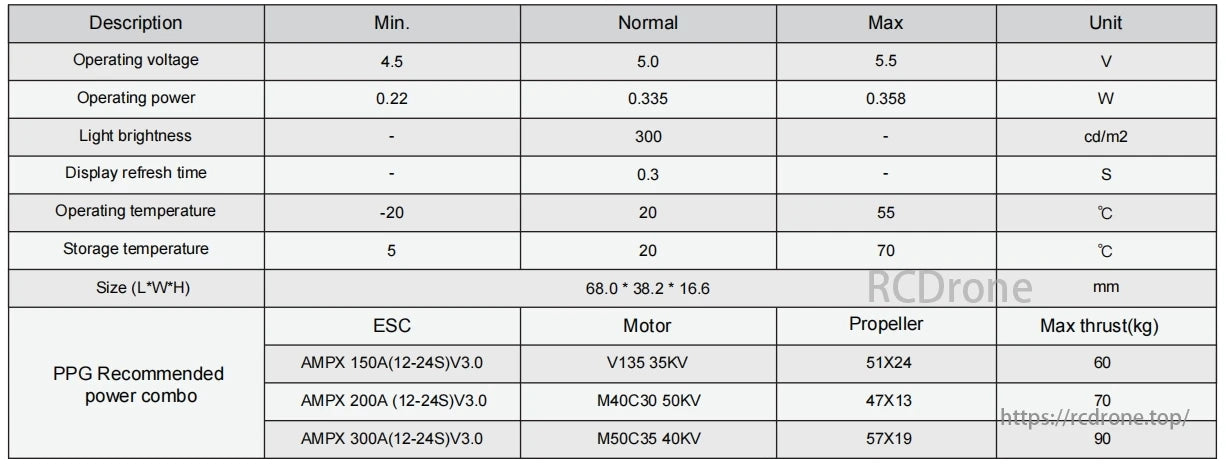
Napięcie robocze: 4,5-5,5 V, moc: 0,22-0,358 W, jasność: 300 cd/m², czas odświeżania: 0,3 s, temperatura pracy: od -20 do 55°C, temperatura przechowywania: od 5 do 70°C, wymiary: 68 x 38,2 x 16,6 mm.Zalecane przez PPG zestawy obejmują regulatory, silniki i śmigła o maksymalnym ciągu do 90 kg.
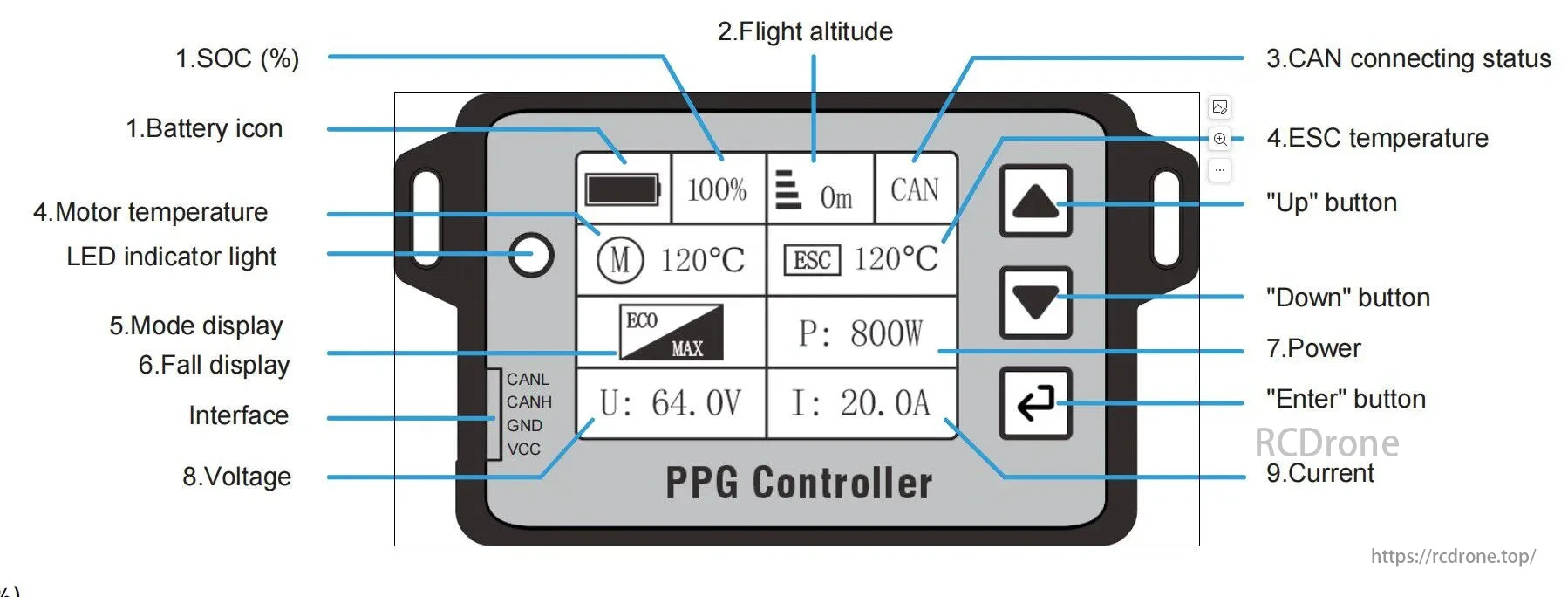
Kontroler PPG wyświetla SOC, wysokość lotu, status CAN, temperatury silnika i ESC, tryb, wyświetlacz upadku, napięcie, prąd. Posiada przyciski góra, dół, zasilanie, enter. Interfejs obejmuje połączenia CANL, CANH, GND, VCC.
Related Collections