




Moduł silnika MagicLab D90N20 do robotów humanoidalnych/czworonożnych, 35 N·m znamionowy, CAN/EtherCAT, podwójny enkoder
Moduł silnika MagicLab D90N20 do robotów humanoidalnych/czworonożnych, 35 N·m znamionowy, CAN/EtherCAT, podwójny enkoder
MagicLab
Nie można załadować gotowości do odbioru
Przegląd
Silnik MagicLab D90N20 to moduł silnika robotycznego zaprojektowany do integracji w systemach takich jak roboty humanoidalne, roboty czworonożne, ramiona robotyczne, egzoszkielety, pojazdy AGV oraz roboty ARU. Posiada kompaktowy radialny design, podwójną konfigurację enkoderów oraz interfejsy komunikacyjne, w tym CAN / EtherCAT.
Kluczowe cechy
- Lekka konstrukcja z kompaktową przestrzenią radialną
- Przemysłowej jakości łożyska krzyżowe dla wysokiej precyzji i sztywności
- Struktura termiczna zaprojektowana do kontrolowania wzrostu temperatury
- Maksymalna średnica pustego wału: 10.6mm (do przejścia przewodów)
- Wysoka zdolność przeciążeniowa
- Wysoka gęstość mocy
- Wysoka wydajność
- Duże puste przejście dla przewodów
- Optymalizowany projekt przekładni (system przekładni o wysokiej precyzji i niskim błędzie przekazania) w celu zmniejszenia hałasu operacyjnego
- Optymalizowany projekt gęstości strumienia magnetycznego; zoptymalizowane połączenie biegunów i szczelin w celu zmniejszenia współczynników rozkładu harmonicznych i eliminacji harmonicznych zębów
W celu uzyskania wsparcia w zakresie wyboru produktów i integracji, skontaktuj się z obsługą klienta pod numerem https://rcdrone.top/ lub [email protected].
Zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Specyfikacje
| Maksymalna prędkość | 300 rpm (zasilanie 24V) |
| Waga modułu | 1100g |
| Moment obrotowy nominalny | 35 N·m |
| Wymiary | φ92*63.4 |
| Moment obrotowy szczytowy | 130 N·m |
| Interfejs komunikacyjny | CAN / EtherCAT |
| Prąd szczytowy | 67.2 A |
| Rekomendowane środowisko pracy | -5°C ~ 40°C |
| Konfiguracja enkodera | Podwójny enkoder |
| Napięcie robocze | 48V - 54V |
| Rozdzielczość enkodera silnika | 18 Bit |
| Częstotliwość sterowania | 25,000 Hz |
| Maksymalna średnica pustego wału | 10.6mm |
Szczegóły
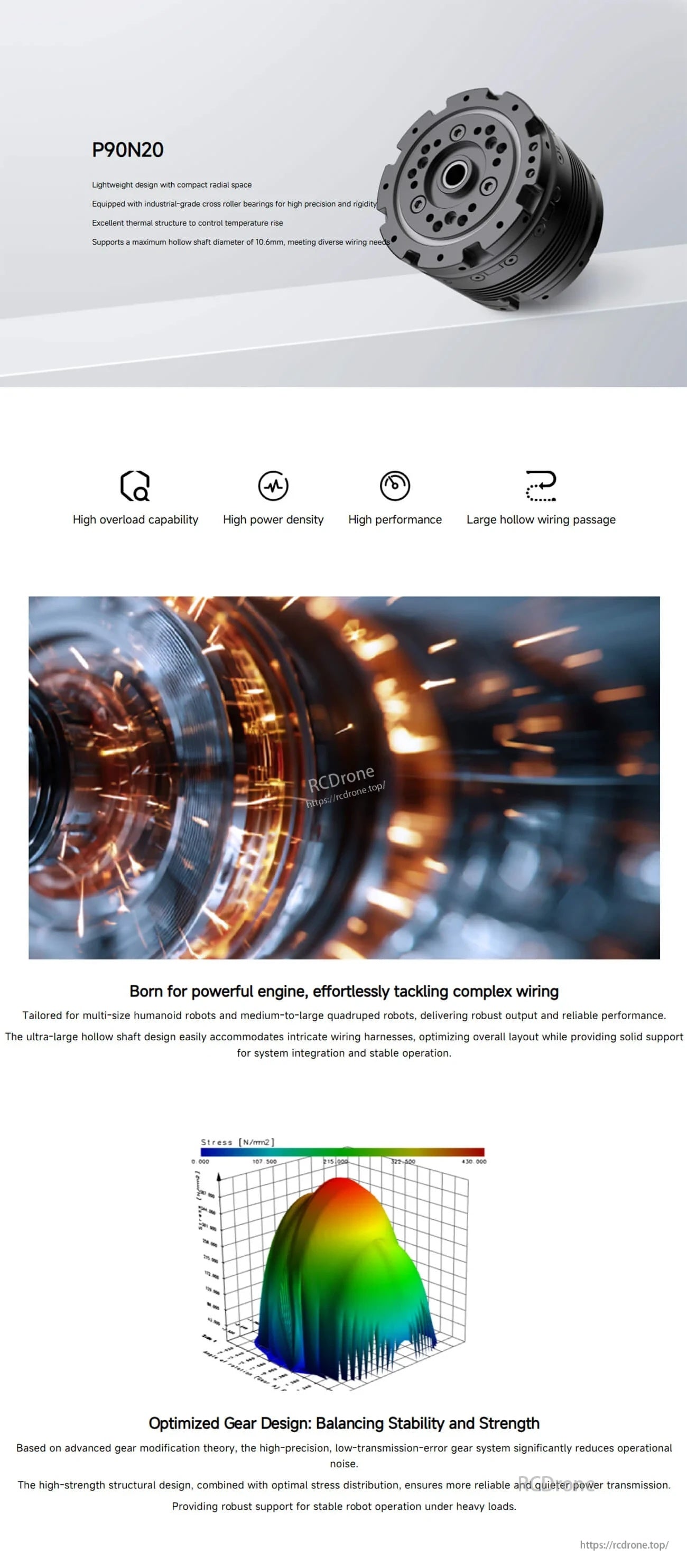
Kompaktowy moduł silnika o wysokiej gęstości mocy zaprojektowany do stawów robotów humanoidalnych i czworonożnych z pustym przejściem kablowym dla czystego wewnętrznego prowadzenia.
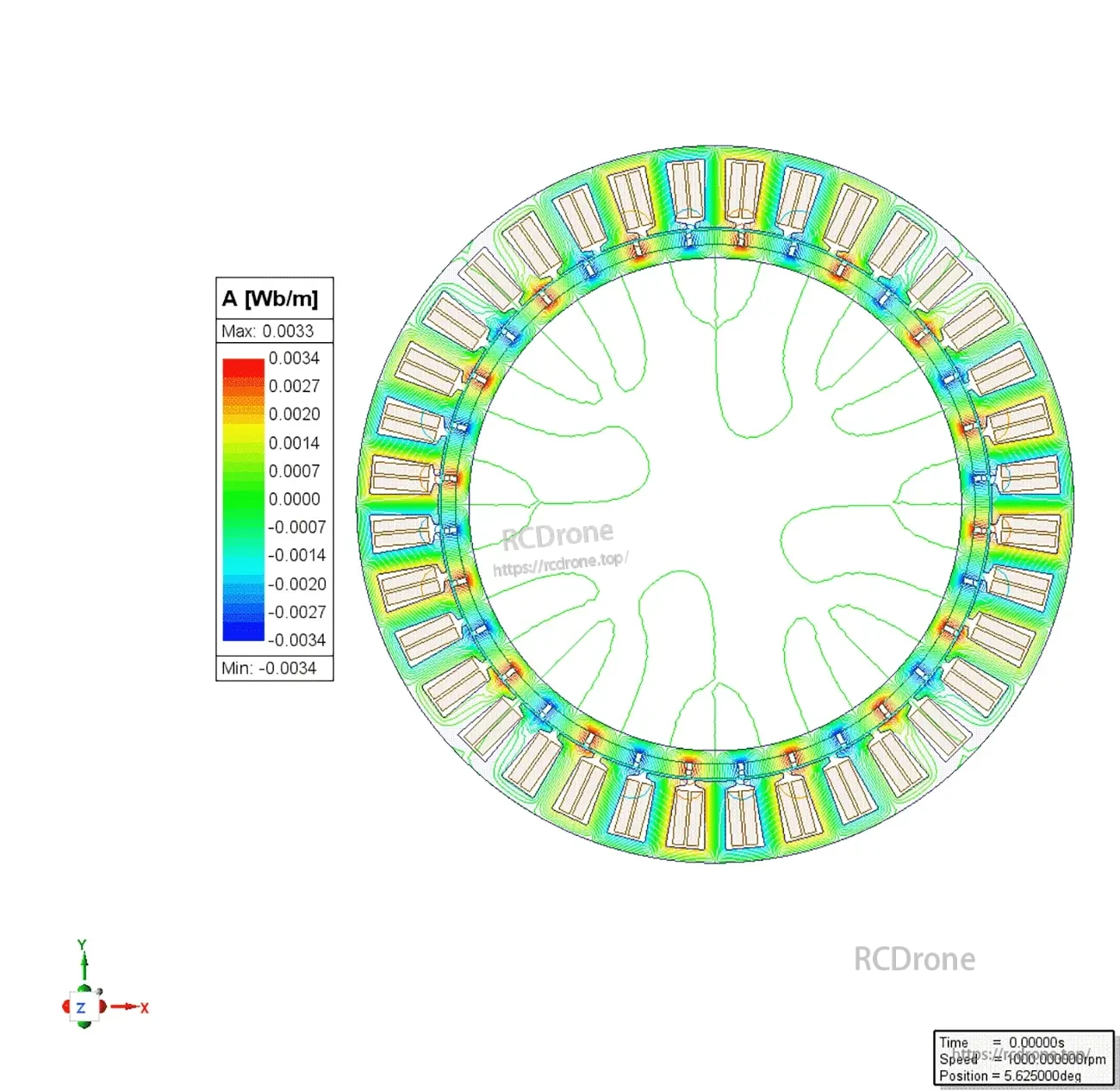
Optymalizacja rozkładu strumienia magnetycznego pomaga zredukować harmoniczne i wspiera płynniejszą, cichszą pracę pod obciążeniem.

Related Collections




