




Moduł silnika MagicLab H70 do robotyki, 30 N·m znamionowy / 96 N·m szczytowy, 48–54V, CAN/EtherCAT
Moduł silnika MagicLab H70 do robotyki, 30 N·m znamionowy / 96 N·m szczytowy, 48–54V, CAN/EtherCAT
MagicLab
Nie można załadować gotowości do odbioru
Przegląd
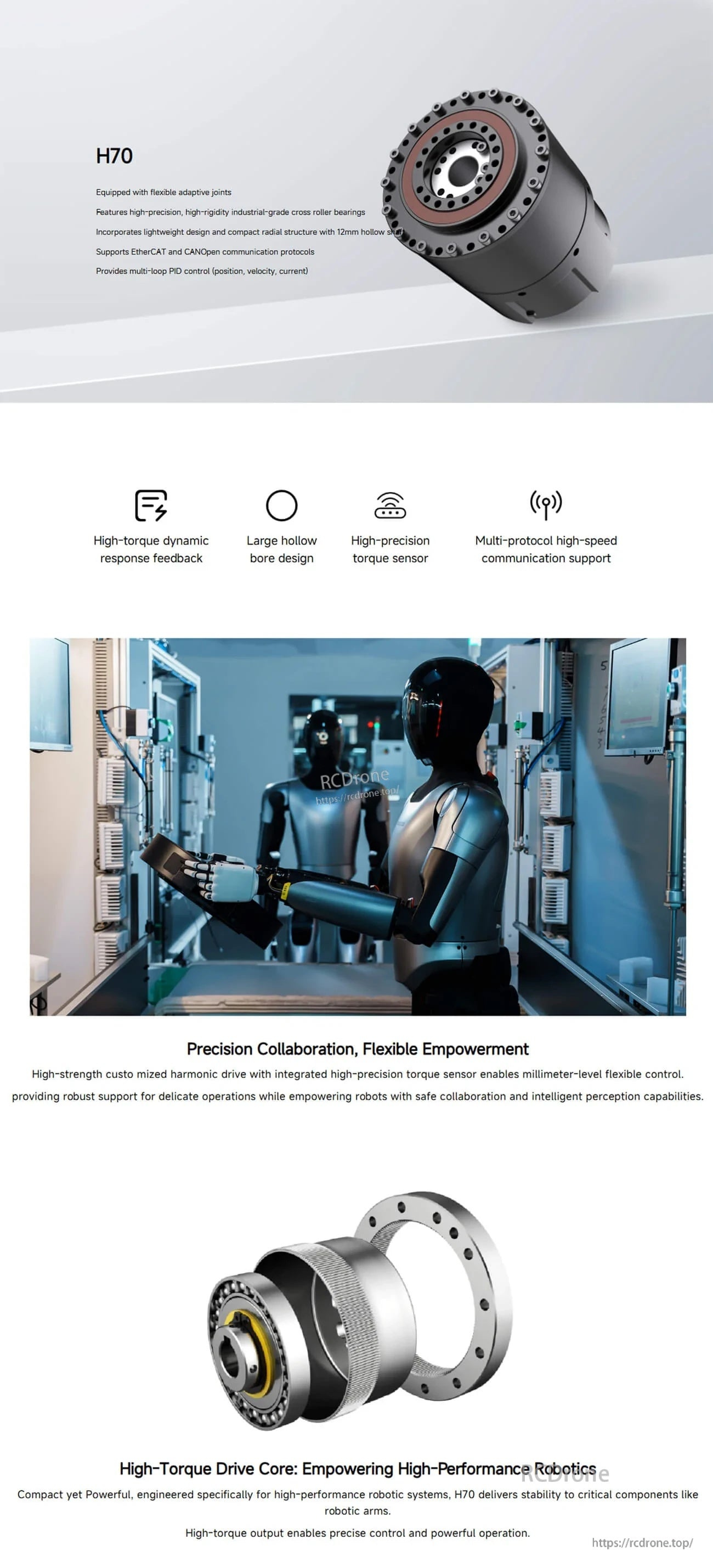
Silnik MagicLab H70 to moduł silnika o wysokim momencie obrotowym do zastosowań w robotyce, zaprojektowany do precyzyjnej kontroli ruchu z podwójnym sprzężeniem zwrotnym enkodera i kontrolą wysokiej prędkości. Obsługuje komunikację CAN / EtherCAT i jest przeznaczony do pracy w zakresie 48V–54V.
Kluczowe cechy
- Wyposażony w elastyczne, adaptacyjne stawy
- Wysokoprecyzyjne, o wysokiej sztywności przemysłowe łożyska krzyżowe
- Lekka konstrukcja i kompaktowa struktura promieniowa z 12 mm pustym wałem
- Obsługuje protokoły komunikacyjne EtherCAT i CANopen
- Zapewnia kontrolę PID z wieloma pętlami (pozycja, prędkość, prąd)
- Wysoka reakcja zwrotna momentu obrotowego
- Duża konstrukcja z pustym otworem
- Wysokoprecyzyjny czujnik momentu obrotowego
- Wsparcie dla komunikacji z wieloma protokołami o wysokiej prędkości
Aplikacje
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Aby uzyskać wsparcie w zakresie integracji i pytania przed sprzedażą, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Uwagi techniczne
- Wysokowytrzymałe, dostosowane do potrzeb harmoniczne napędy z wbudowanym, wysokoprecyzyjnym czujnikiem momentu obrotowego umożliwiają elastyczną kontrolę na poziomie milimetrów, zapewniając solidne wsparcie dla delikatnych operacji, jednocześnie umożliwiając bezpieczną współpracę i inteligentne możliwości percepcyjne.
- Optymalny projekt gęstości strumienia z wyborem optymalnego dopasowania biegunów do szczelin; redukcja współczynników rozkładu harmonicznych i eliminacja harmonicznych zębów.
- Podana charakterystyka krzywej sterowania silnikiem (wykres).
Specyfikacje
| Maksymalna prędkość | 30 rpm (zasilanie 48V) |
| Waga modułu | 900g |
| Moment obrotowy nominalny | 30 N·m |
| Moment obrotowy szczytowy | 96 N·m |
| Wymiary | φ70*96 |
| Napięcie robocze | 48V - 54V |
| Prąd szczytowy | 11 A |
| Zalecane środowisko pracy | -5°C ~ 40°C |
| Konfiguracja enkodera | Podwójny enkoder |
| Rozdzielczość enkodera silnika | 19 Bit |
| Częstotliwość sterowania | 25,000 Hz |
| Interfejs komunikacyjny | CAN / EtherCAT |
| Legenda wykresu gęstości strumienia | A [Wb/m] (Max: 0.0034, Min: -0.0034) |
Szczegóły
Zapewniając precyzyjne ruchy robotyczne, MagicLab H70 łączy wysoki moment obrotowy z kompaktową formą wału pustego, co umożliwia czyste prowadzenie kabli.
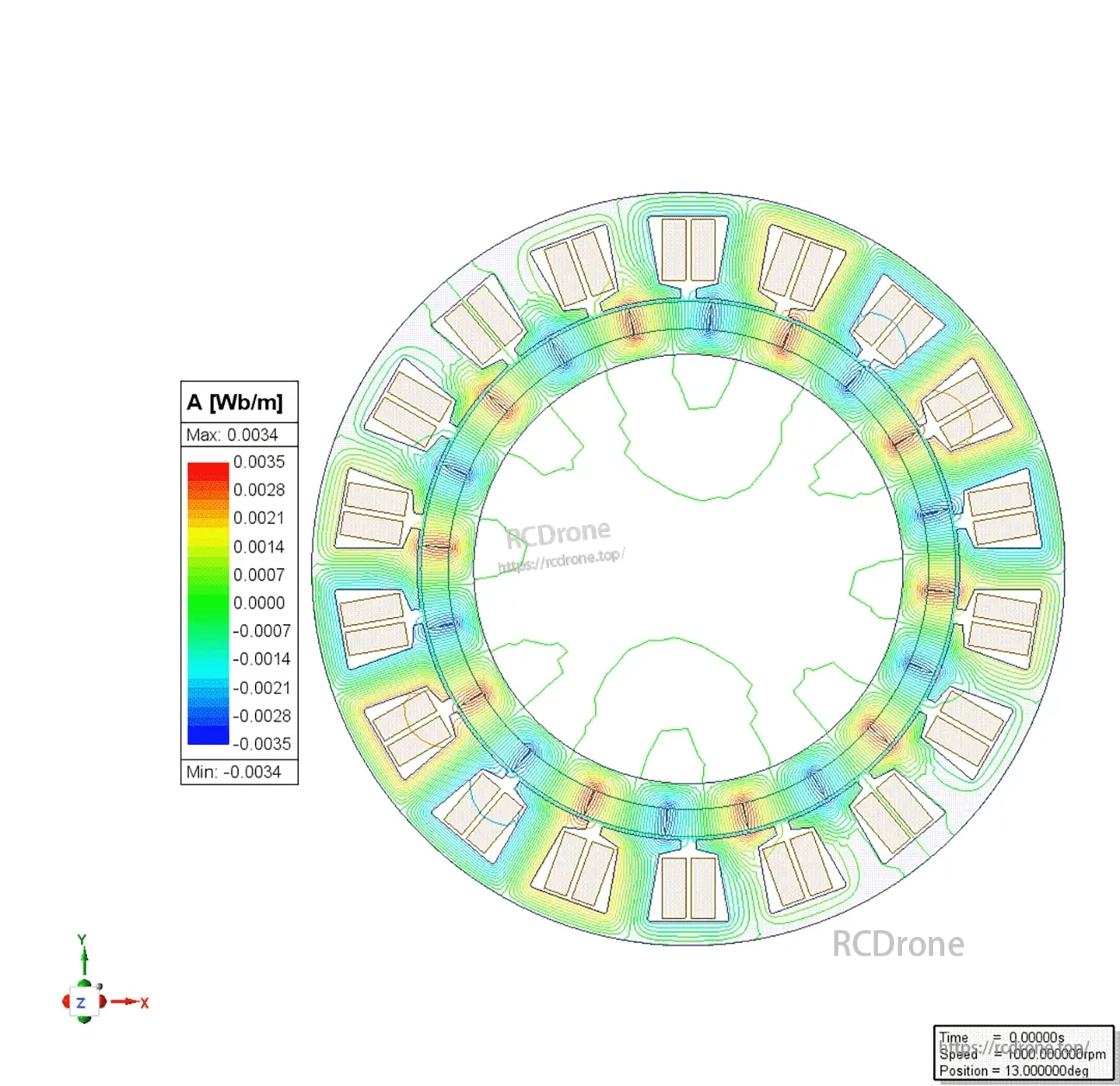
Optymalizacja rozkładu gęstości strumienia wspiera płynniejsze wyjście momentu obrotowego i pomaga zredukować efekty harmoniczne w wymagających kontrolach ruchu.
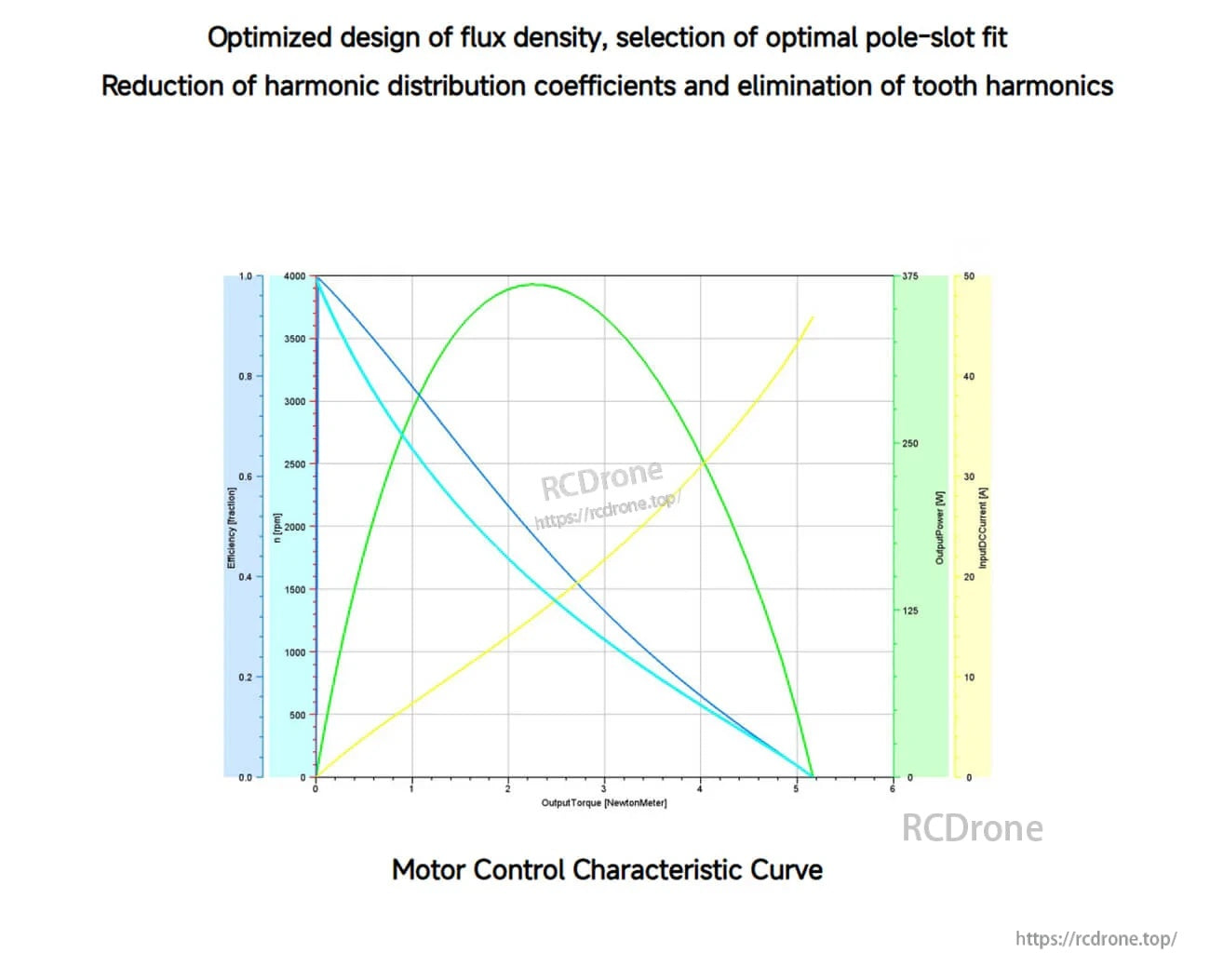
Krzywe charakterystyki sterowania dostarczają szybkiego odniesienia do dopasowania wymagań momentu obrotowego do ograniczeń prędkości i prądu w projekcie robota.
Related Collections




