




MagicLab P110 Silnik 360 N·m Maksymalny Moment, Podwójny Enkoder, Napęd CAN/EtherCAT do Robotów Humanoidalnych
MagicLab P110 Silnik 360 N·m Maksymalny Moment, Podwójny Enkoder, Napęd CAN/EtherCAT do Robotów Humanoidalnych
MagicLab
Nie można załadować gotowości do odbioru
Przegląd
Silnik MagicLab P110 to silnik o wysokim momencie obrotowym zaprojektowany do stawów robotycznych, wyposażony w system podwójnych enkoderów oraz opcje szybkiej komunikacji (CAN / EtherCAT). Jest przeznaczony do stawów o dużym obciążeniu, takich jak siłowniki nóg w pełnowymiarowych robotach humanoidalnych oraz dużych robotach czworonożnych klasy przemysłowej.
Kluczowe cechy
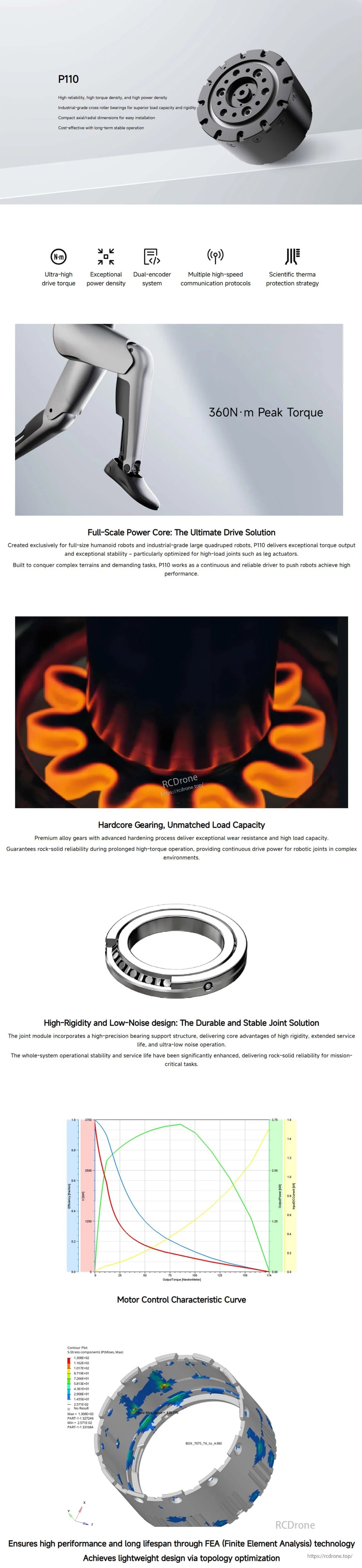
- Moment obrotowy szczytowy 360 N·m
- Ultra-wysoki moment obrotowy i wyjątkowa gęstość mocy
- System podwójnych enkoderów (rozdzielczość enkodera silnika: 15 Bit)
- Interfejs komunikacyjny: CAN / EtherCAT (wiele protokołów komunikacyjnych o wysokiej prędkości)
- Naukowa strategia ochrony termicznej
- Wytrzymałe przełożenie dla nośności (przekładnie z premium stopów z zaawansowanym procesem utwardzania)
- Projekt o wysokiej sztywności i niskim poziomie hałasu z precyzyjną strukturą wsparcia łożysk
- Technologia FEA (Analiza Metodą Elementów Skończonych) dla wysokiej wydajności i długiej żywotności; lekka konstrukcja przy zachowaniu wytrzymałości
Zastosowania
- Roboty humanoidalne
- Ramiona robotyczne
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Specyfikacje
| Maksymalna prędkość | 20 rpm (zasilanie 24V) |
| Waga modułu | 1900g |
| Moment nominalny | 90 N·m |
| Moment szczytowy | 360 N·m |
| Wymiary | Φ112*71.5 |
| Napięcie robocze | 48V - 54V |
| Prąd szczytowy | 137 A |
| Interfejs komunikacyjny | CAN / EtherCAT |
| Konfiguracja enkodera | Podwójny enkoder |
| Rozdzielczość enkodera silnika | 15 Bit |
| Częstotliwość sterowania | 25,000 Hz |
| Zalecane środowisko pracy | -5°C ~ 40°C |
W przypadku pytań dotyczących integracji, interfejsu lub konfiguracji, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Szczegóły
Stworzony do pracy w wysokich obciążeniach w stawach humanoidalnych i czworonożnych, MagicLab P110 łączy szczytowy moment obrotowy 360 N·m z informacją zwrotną z podwójnego enkodera oraz komunikacją CAN/EtherCAT dla precyzyjnego i responsywnego działania.
Related Collections




