Matek AP Periph CAN Node CAN-G474 Adapter DroneCAN, STM32G474CE 512KB, CANFD 5Mbit/s
Matek AP Periph CAN Node CAN-G474 Adapter DroneCAN, STM32G474CE 512KB, CANFD 5Mbit/s
MATEKSYS
Nie można załadować gotowości do odbioru
Przegląd
Ten węzeł AP Periph CAN, Matek AP Periph CAN Node CAN-G474, jest węzłem adaptera ArduPilot AP_Periph zaprojektowanym do dodawania peryferiów do magistrali DroneCAN za pomocą transceivera CAN o prędkości 5Mbit/s i mikrokontrolera STM32G474. Umożliwia integrację czujników wspieranych przez ArduPilot oraz peryferiów opartych na GPIO (takich jak wyjścia PWM i moduły powiadamiania LED) przez DroneCAN.
Kluczowe cechy
- Węzeł adaptera oparty na oprogramowaniu ArduPilot AP_Periph
- Mikrokontroler STM32G474CE z 512KB Flash
- Sprzęt obsługujący CANFD z wsparciem dla CAN/CANFD od 1Mbit do 5Mbit
- 2x magistrala CAN
- 4x UART dla GNSS, dalmierza, czujnika zbliżeniowego, EFI, wejścia RC (odbiornik); MSP włączone na TX3 domyślnie dla GNSS, kompasu, barometru przez MSP
- 2x magistrala I2C dla urządzeń peryferyjnych I2C (czujnik prędkości powietrza, barometr, kompas)
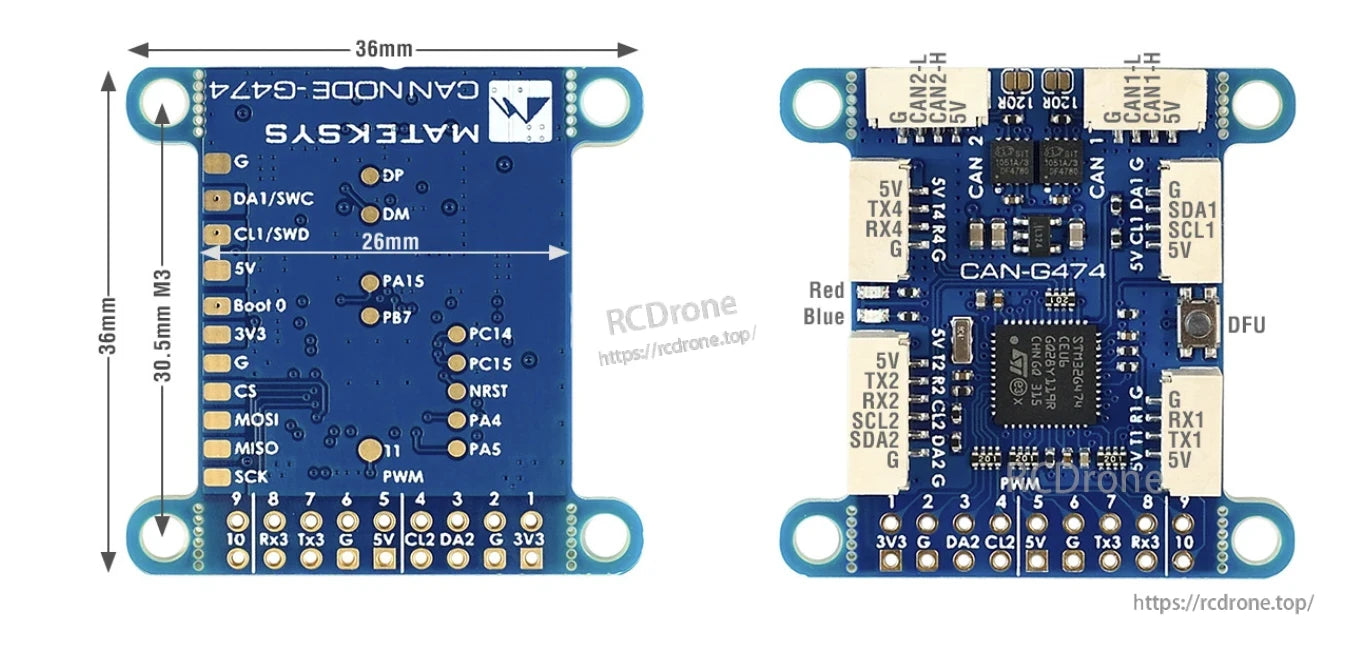
- 1x SPI dla RM3100 (pady SPI na dolnej stronie z nadrukiem “CS, MOSI, MISO, SCK”)
- 11x wyjść PWM dla serwomechanizmów i ESC; wszystkie PWM obsługują DMA/DShot (PWM1-10 na DuPont 2.54mm otwory; pad PWM11 na dolnej stronie z nadrukiem "11"
- Wsparcie aktualizacji oprogramowania za pomocą narzędzia DroneCAN GUI / Mission Planner (zakładka DroneCAN) oraz za pomocą trybu DFU STM32CubeProgrammer (UART1)
Specyfikacje
| MCU | STM32G474CE |
| Flash | 512KB |
| Prędkość transmisji danych transceivera CAN | Do 5Mbit/s |
| Wsparcie CAN / CANFD | 1Mbit ~ 5Mbit CAN/CANFD |
| Szyna CAN | 2x |
| UART | 4x (MSP włączone na TX3 domyślnie) |
| I2C | 2x |
| SPI | 1x (dla RM3100) |
| Wyjścia PWM | 11x (PWM1-10 na DuPont 2.54mm otwory; pad PWM11 na dolnej stronie) |
| Debug | Debug ST, SWC & SWD (na dolnej stronie) |
| Aktualizacja oprogramowania (DFU) | UART1 (TX1, RX1) |
| Wskaźniki LED | Niebieskie szybkie miganie: Uruchamianie; Niebieskie wolne miganie: komunikacja z kontrolerem lotu; Czerwony: wskaźnik 3.3V |
| Zakres napięcia wejściowego | 4.5~5.5V @5V pad/pin& |
| Zużycie energii | 62mA |
| Temperatury pracy | -30~85 °C |
| Złącza | 5x JST-GH-4P (SM04B-GHS-TB) dla CAN1, CAN2, I2C1, UART1, UART4; 1x JST-GH-6P (SM06B-GHS-TB) dla UART3+I2C2 |
| Otwory przelotowe | 18x DuPont 2.54mm otwory |
| Rozmiar płyty | 36mm*36mm*6mm |
| Waga | 5.2g |
| Montaż | 30.5mm 4x Średnica.3mm |
Co jest w zestawie
- 1x płytka CAN-G474
- 2x przewód silikonowy JST-GH-4P do JST-GH-4P 20cm
- 1x przewód silikonowy JST-GH-6P do JST-GH-6P 20cm
Obsługa klienta: https://rcdrone.top/ lub [email protected]
Zastosowania
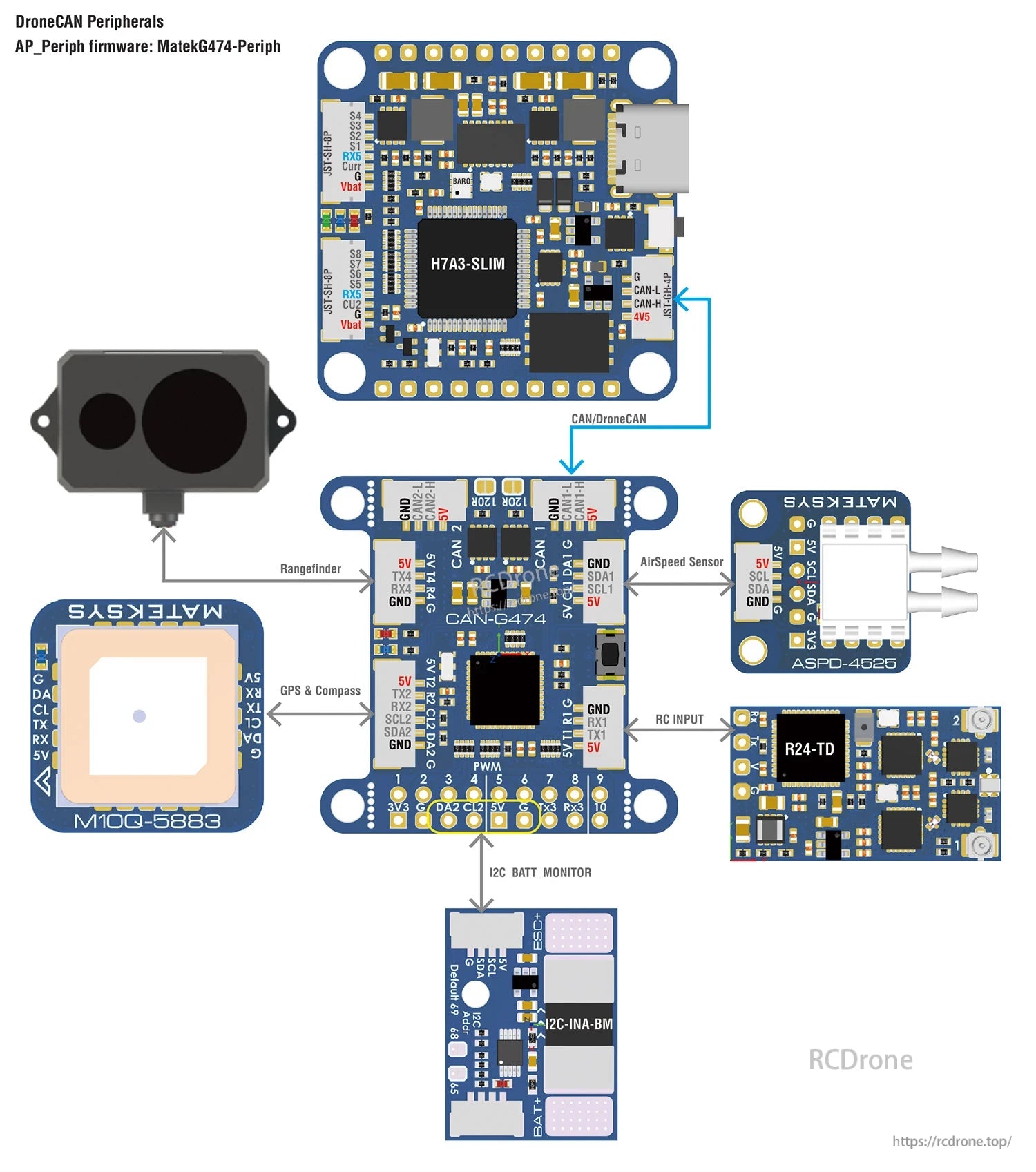
- Konwersja peryferiów wspieranych przez ArduPilot na peryferia szyny DroneCAN (GNSS, Kompas, Barometr, Czujnik prędkości powietrza, Zasięg, Czujnik zbliżeniowy, Elektroniczne wtryskiwacze paliwa)
- Peryferia oparte na GPIO na DroneCAN, w tym moduły powiadamiania PWM i LED
- Przykładowe połączenia peryferiów: Zasięg, GPS & Kompas, Czujnik prędkości powietrza, WEJŚCIE RC, I2C MONITOR BATERII
- Opcja redundancji: podłącz jedną szynę CAN do kontrolera lotu lub podłącz obie
Podręczniki
- Pobieranie oprogramowania układowego (ArduPilot AP_Periph): https://firmware.ardupilot.org/AP_Periph/
- MatekG474-Periph (do czujników peryferyjnych)
- MatekG474-DShot (do wyjścia DroneCAN-PWM)
- Metody aktualizacji
- Narzędzie GUI DroneCAN lub Mission Planner – zakładka DroneCAN, załaduj “AP_Periph.bin”
- Tryb DFU STM32CubeProgrammer: podłącz moduł USB-TTL do UART1, podłącz USB trzymając przycisk DFU, załaduj “AP_Periph_with_bl.hex”
- Plik 3D: CAN-G474_STEP.zip
- Samouczek: Używanie adapterów MatekL431 do PWM i DShot
Szczegóły
Płyta Matek CAN-G474 zapewnia port DroneCAN/CAN obok padów UART, I2C i PWM do podłączania powszechnych peryferiów autopilota.Płytka Matek CAN-G474 łączy się z magistralą CAN/DroneCAN i udostępnia do 10 wyjść PWM dla serwomechanizmów lub ESC.
Related Collections